ECR60/ECT60 User manual
1
第一章 Drive description
1.1 Product introduction
Thank you for choosing the Reiter EC series stepper motor driver. The EC Series is a
high-performance bus-controlled stepper motor driver with the ability to integrate
intelligent motion controllers. The EC Series EtherCAT drives can be operated as
standard EtherCAT slaves and support CoE (CANopen over EtherCAT).
The ECR60 is open-loop control and the ECT60 is closed-loop control.
Characteristics
⚫Operating voltage DC: 24 to 80V
⚫Support for CoE (CANopen over EtherCAT), CiA 402 compliant
⚫Support for CSP, PP, PV, Homing mode
⚫Minimum sync period 500us
⚫Double-mouthEd RJ45 connector for EtherCAT communications
⚫Maximum phase current output: 6A/phase (sine peak)
⚫Control methods: open-loop control, closed-loop control, FOC control
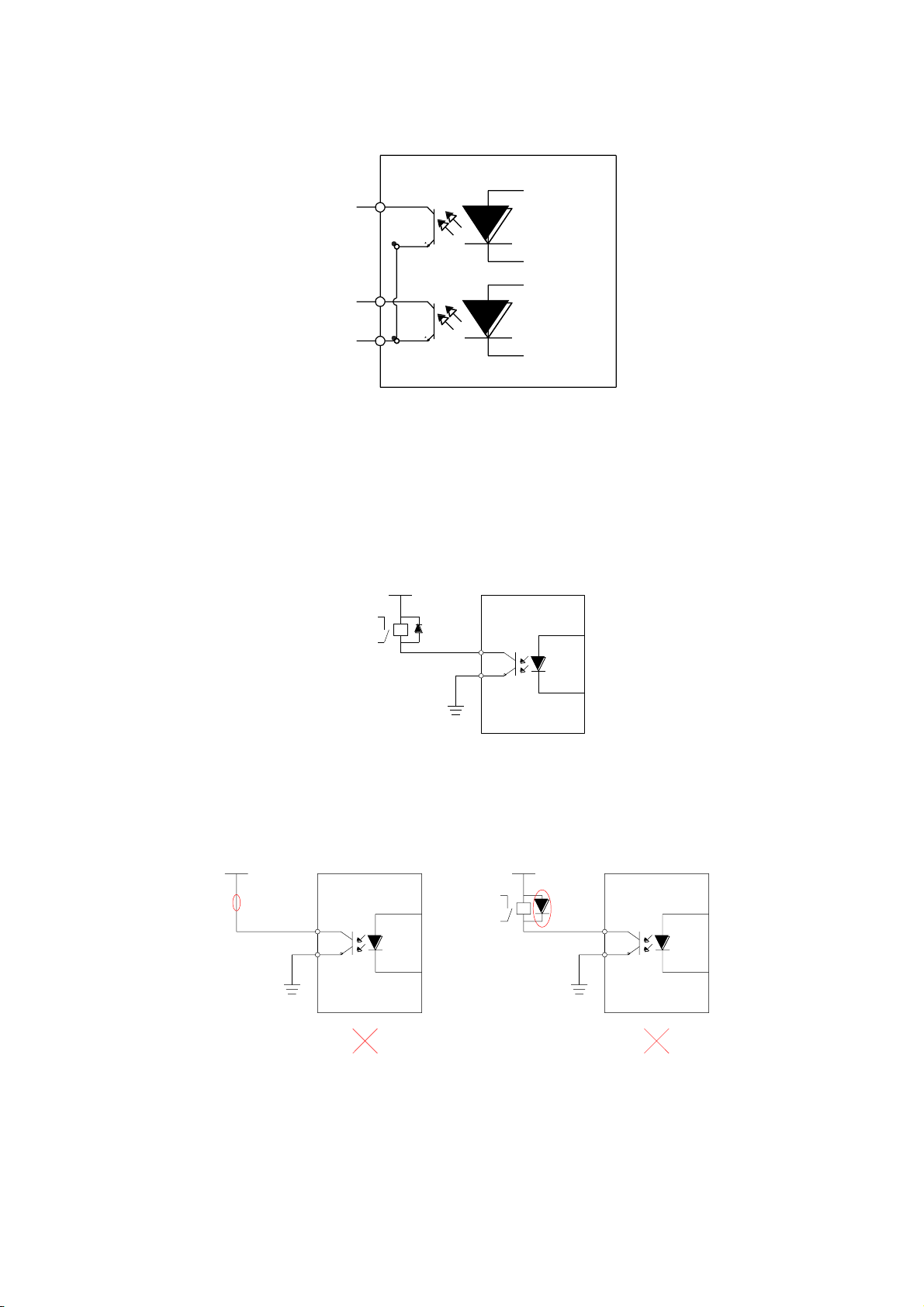
⚫Digital IO port:
6-way photoelectric isolation of digital signal input: IN1,IN2 for 5V differential input, can
also be connected to 5V single-ended input, IN3toIN6 for 24Vsingle-ended input, total
anode method;
2-way photoelectric isolation of digital signal output, maximum resistance voltage of