TABLE OF CONTENTS
DETECTOR ASSEMBLY...............................................................................................................3
BATTERY INSTALLATION............................................................................................................3
CONTROL PANEL.........................................................................................................................4
TURNING ON/OFF........................................................................................................................4
GROUND BALANCE.....................................................................................................................4
DISPLAY........................................................................................................................................5
OPERATING MODE SELECTION................................................................................................6
IDENTIFICATION..........................................................................................................................6
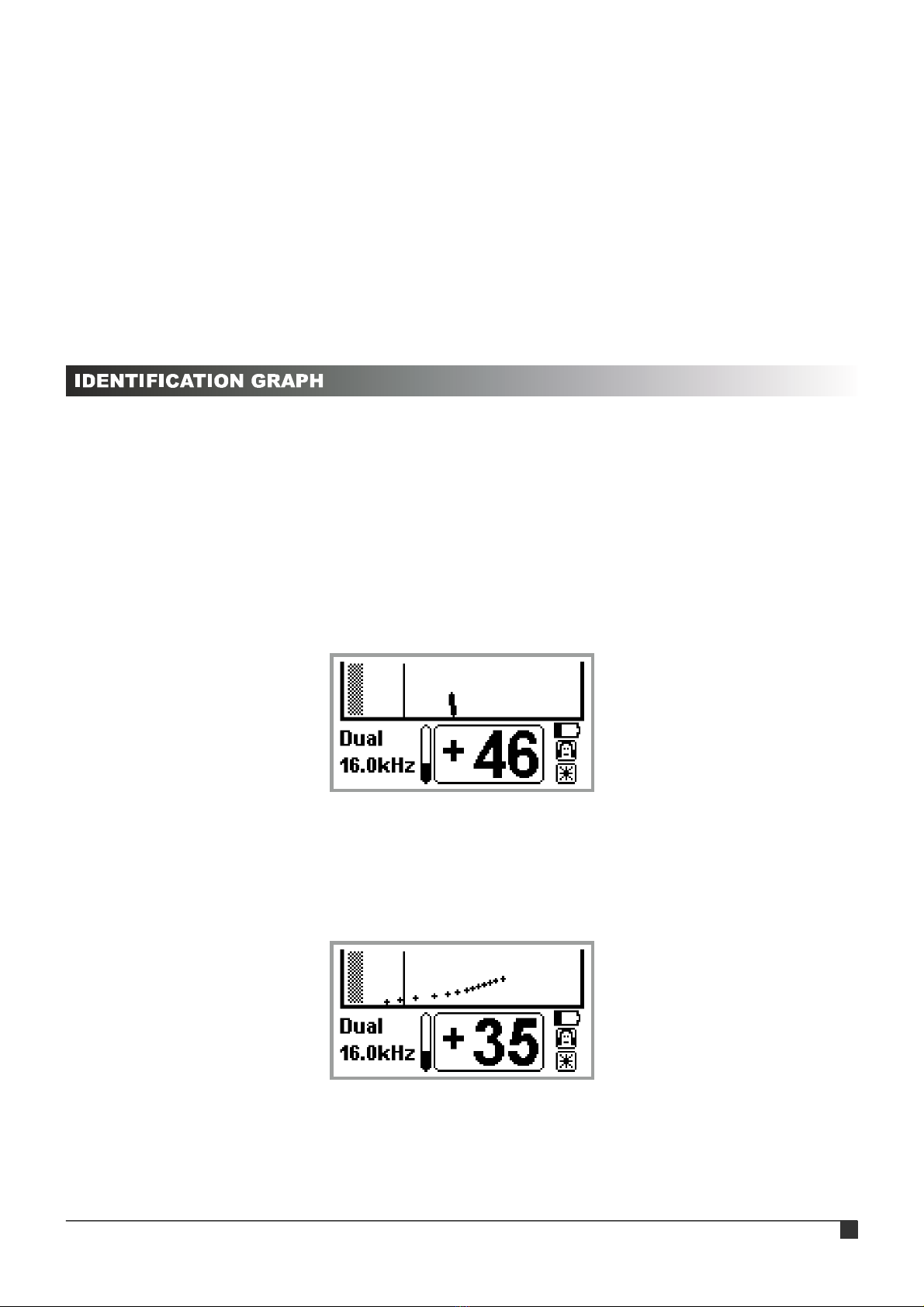
IDENTIFICATION GRAPH............................................................................................................7
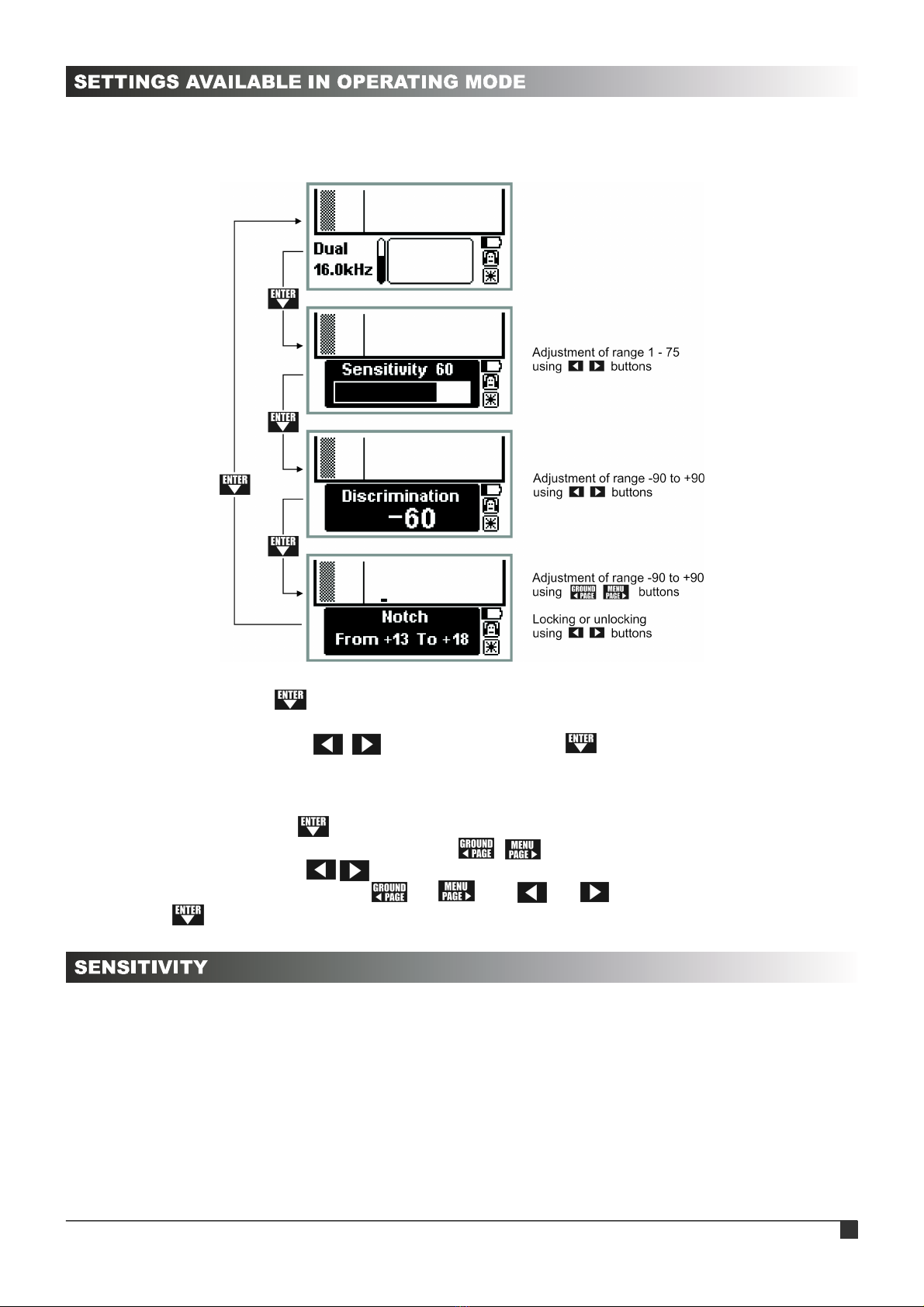
SETTINGS AVAILABLE IN OPERATING MODE...........................................................................8
SENSITIVITY.................................................................................................................................8
DISCRIMINATION.........................................................................................................................9
NOTCH..........................................................................................................................................9
PINPOINT......................................................................................................................................9
OVERLOAD...................................................................................................................................9
MENU LAYOUT...........................................................................................................................10
MAIN SETTINGS.........................................................................................................................11
Frequency..........................................................................................................................11
Frequency shift..................................................................................................................11
Hot Rock............................................................................................................................11
Backlight............................................................................................................................12
Volume...............................................................................................................................12
Wireless.............................................................................................................................12
Language...........................................................................................................................12
MOTION MODE SETTINGS.......................................................................................................13
Th Level.............................................................................................................................13
Th Tone..............................................................................................................................13
Tones.................................................................................................................................13
Audio Gain........................................................................................................................14
Masking.............................................................................................................................14
Reaction............................................................................................................................14
NON-MOTION MODE SETTINGS..............................................................................................14
Th Level............................................................................................................................15
Th Tone.............................................................................................................................15
VCO..................................................................................................................................15
SAT...................................................................................................................................15
DUAL MODE SETTINGS............................................................................................................15
DETECTOR'S CAPABILITIES.....................................................................................................16
MODES OF OPERATION...........................................................................................................17
MODES OF OPERATION AND SEARCHING.............................................................................19
SEARCHING – USEFUL ADVICE...............................................................................................19
NOTES FOR MAINTENANCE....................................................................................................20
EU DECLARATION OF CONFORMITY.......................................................................................21
RUTUS Argo NE