3
Contents
1Read First.............................................................................................................................................. 4
1.1 Safety and Caution Symbols.......................................................................................................... 4
1.2 Intended Use.................................................................................................................................. 4
1.3 Dangers.......................................................................................................................................... 4
1.3.1 Neglecting of Safety Notes..................................................................................................... 4
1.3.2 Remaining Dangers................................................................................................................ 4
1.4 Reconstructions and Modifications................................................................................................ 4
1.5 Personnel....................................................................................................................................... 4
1.6 Warning Notes ............................................................................................................................... 4
2Term Definitions.................................................................................................................................... 5
2.1 Terms............................................................................................................................................. 5
2.2 Definition of the Pictograms on the Torque Sensor....................................................................... 5
3Product Description............................................................................................................................... 5
3.1 Mechanical Setup ......................................................................................................................... 5
3.2 Electrical Setup.............................................................................................................................. 5
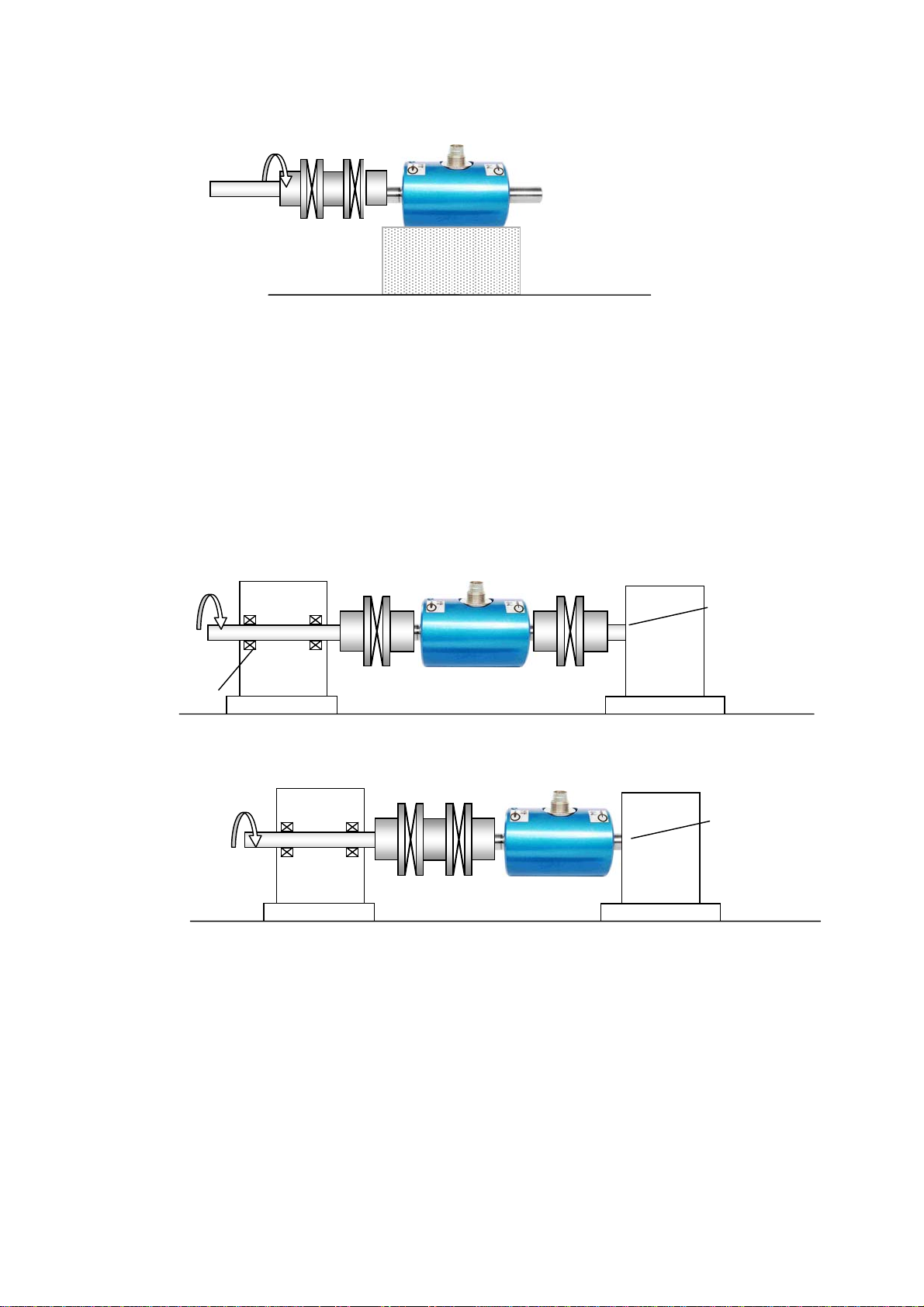
4Mechanical Assembly............................................................................................................................ 6
4.1 Couplings....................................................................................................................................... 6
4.1.1 Examples for Single-Jointed Couplings.................................................................................. 6
4.1.2 Misalignment Possibilities of Single-Jointed Couplings......................................................... 6
4.1.3 Double-Jointed Couplings....................................................................................................... 7
4.1.4 Alignment of the Measurement Arrangement......................................................................... 7
4.2 Shaft Connection............................................................................................................................ 7
4.2.1 General................................................................................................................................... 7
4.2.2 Torque Sensors of 0,005 N·m to 0,02 N·m............................................................................. 7
4.2.3 Torque Sensors of 0,03 N·m to 15 N·m.................................................................................. 8
4.2.4 Torque Sensor from 20 N·m................................................................................................... 9
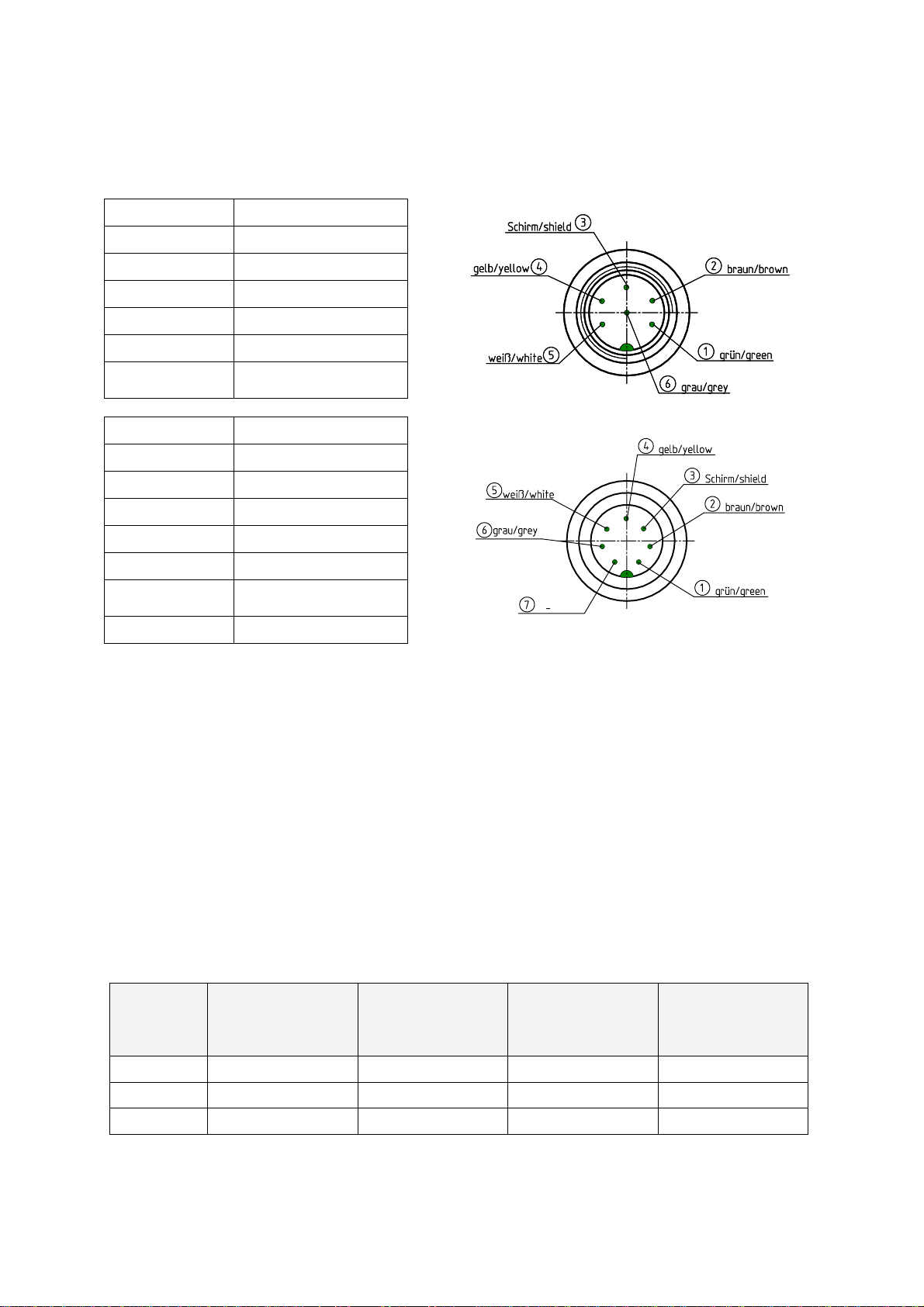
5Electrical Connection........................................................................................................................... 10
5.1 Pin Connection............................................................................................................................. 10
5.2 Cable............................................................................................................................................ 10
5.3 Shielding Connection................................................................................................................... 10
5.4 Extension Cable........................................................................................................................... 10
5.5 Running of Measuring Cables...................................................................................................... 11
6Measuring............................................................................................................................................ 11
6.1 Engaging...................................................................................................................................... 11
6.2 Direction of Torque....................................................................................................................... 11
6.3 Static / Quasi-Static Torques....................................................................................................... 11
6.4 Dynamic Torques......................................................................................................................... 11
6.4.1 General................................................................................................................................. 11
6.4.2 Natural Resonances............................................................................................................ 11
6.5 Disturbance Variables.................................................................................................................. 12
6.6 Calibration Control (Option)........................................................................................................ 12
7Maintenance........................................................................................................................................ 13
7.1 Maintenance Schedule ................................................................................................................ 13
7.2 Trouble Shooting.......................................................................................................................... 13
8Decommission..................................................................................................................................... 13
9Transportation and Storage ................................................................................................................ 13
9.1 Transportation......................................................................................Erreur ! Signet non défini.
9.2 Storage......................................................................................................................................... 13
10 Disposal...................................................................................................Erreur ! Signet non défini.
11 Calibration................................................................................................Erreur ! Signet non défini.