Siro ERBS15LE Series User manual

Battery Motor – Radio Drive
ERBS15LE - Series
Compatible with:
Control Station SI7002
Remote Controller SIS1600, SIS1602, SIS1605
Solar Panel SI1288H
Sun Sensor SIS1187
05-2020

1
1. General safety guidelines
Notes on the product
Check the drive for intactness. Do not use the product if you discover any damage.
In this case, contact the point of sale.
Only use the drive to open and close suitable hangings.
Read this manual completely before starting the installation.
Make sure that the roller blind’s tube, in which you intend to use the drive, is
undamaged.
Check that the blind can be opened and closed smoothly.
Replace damaged parts if you find any defects.
Inform all persons in safe use of the controls and the drive.
Observe the blind during the operation and keep people away until the blind is
fully opened or closed.
Do not allow children to play with the control unit.
2. Connection and installation
The distance between the drive and the transmitter should be at least 300 mm.
The distance between two remote control receivers should be at least 500 mm.
Strong, local transmitters (e.g. radio headphones), whose transmission frequency is identical
to the control (433MHz), can influence the function.
It is recommended to fully charge the drive before the initial installation. Only then will the
motor reach full power. The drive is equipped with a control display which allows you to
monitor the charge level at any time. The control display flashes when charging. If the light
is continuously red, the actuator is fully charged. You can remove the charging cable.
The engine can also be operated and programmed during charging.
Mains connection at motor head:
2
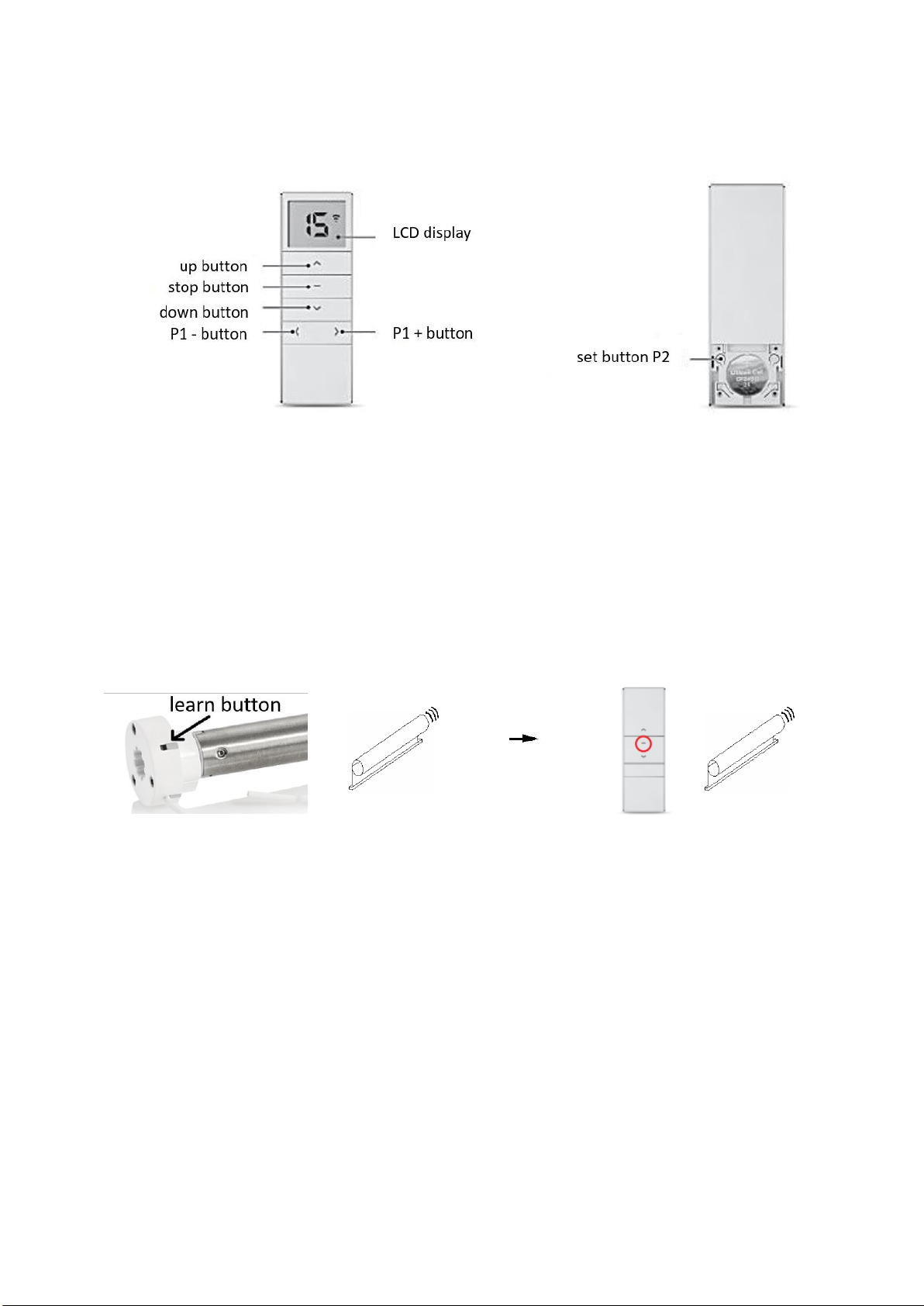
3. Programming of the remote control (radio) transmitters
3.1 Check the connection between the engine and transmitter
1. Test the connection between the handheld transmitter (remote controller) and the motor by
pressing the up or down button to move the drive up or down. If the connection exists,
please go directly to point 3.3.
2. If the motor does not move, you must first establish the connection between the motor and
the transmitter.
Important: For all programming, please only use the left P2 button as shown.
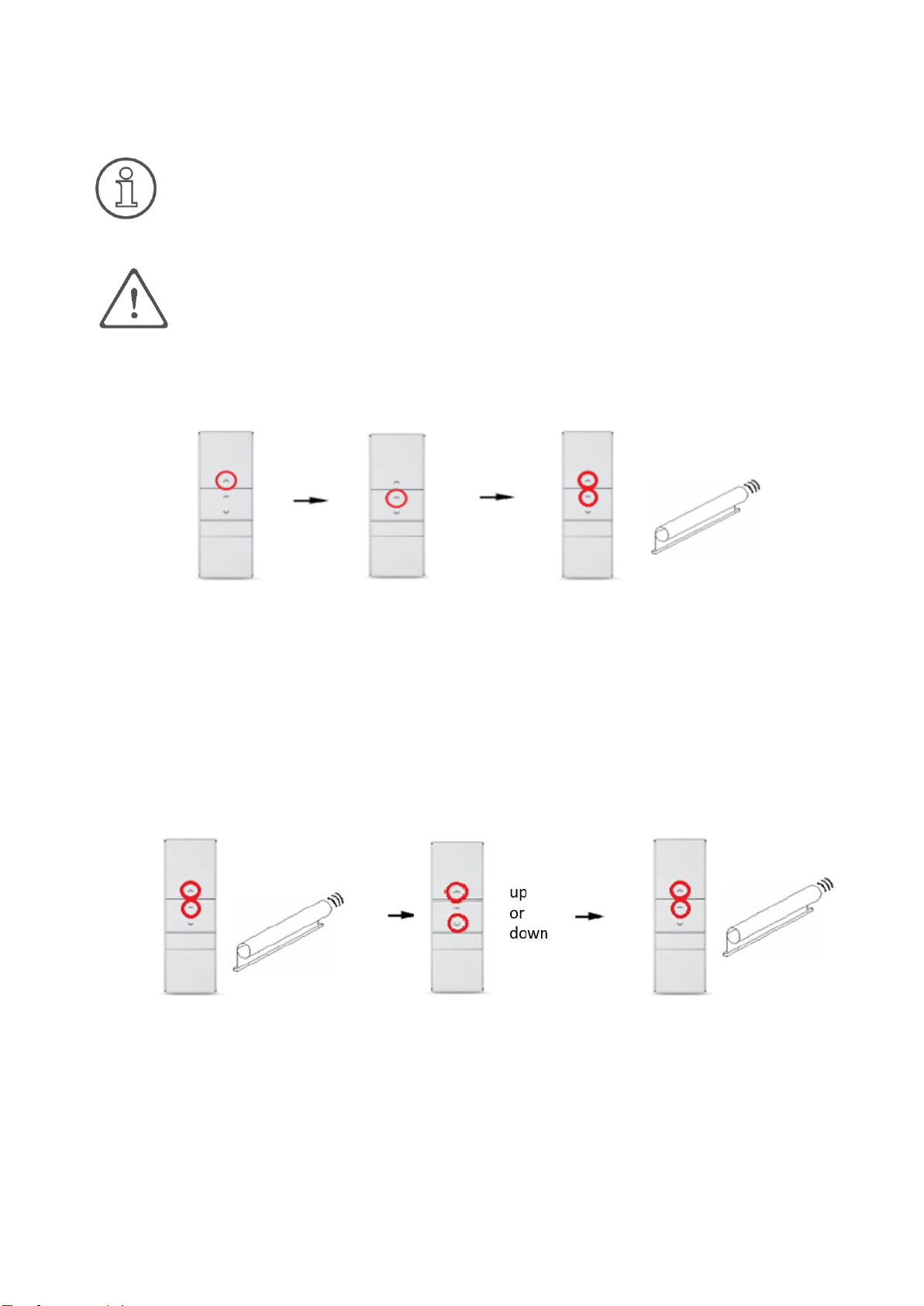
3.2 Establishing and deleting the connection between the motor and the remote
controller
Establish connection:
The connection from the drive to the remote controller is thus established. You can now
control the drive by pressing the up and down buttons on the remote controller.
Initially, the drive moves only step by step when the up/down button is pressed briefly.
If you press the button for a long time, the drive then moves permanently. Once the end
positions have been set, the mode of operation then changes automatically to permanent
mode.
Delete connection:
If the end positions are already set (important!), the connection between motor and remote
controller can be deleted by completing the same operations as for Establish connection.
2. Specify a channel. Press and hold
the stop button on the remote
controller, up to 10 seconds, until the
drive responds with two up/down
movements.
1. Press and hold the learn button on the motor
head with an object until the drive reacts only
once (usually after 3 seconds) with a short
up/down movement. Release the learn button
immediately.

3
3.3 Check and change the direction of rotation of the drive
Important: Please ensure the direction of rotation before starting to input the motor. We are
not liable for product damage caused by negligence during installation.
If the direction of rotation is reversed, there are two ways to change this
1. Using the remote controller:
Important: Please note that this change must be made before setting the end positions.
Otherwise, you need to re-teach the remote controller.
2. Using the motor:
This method can also be used after the end position has been set.
Keep the up and down buttons pressed
simultaneously until the drive reacts with
short up/down movements. Release the
buttons again. This changes the direction
of rotation of the motor.
Press and hold the learn button on the
motor head with an object until the drive
reacts 3 times with short up/down
movements. Release the learn button
immediately. This changes the direction
of rotation.

4
4. Installation of the motor
Do not hit the motor with hard object – not even to push it into the roller blind’s
tube. This can cause damage to the drive and the shaft.
Avoid installing the motor in damp places or places where it encounters water.
Installation
Place the motor into the shaft using the appropriate adapter set.
Driver and adapter must be completely inserted into the shaft. If necessary, the adapter must
first be pushed into the groove provided for this purpose on the crown of the motor head
The head of the motor can be installed either on the right or on the left side.
When installing the motor, make sure that the head of the motor remains freely accessible for
charging after installation.
5
5. Setting the end positions
You need to define the upper and lower end positions, when reaching these, the
drive switches off automatically. To do this, the drive system must be fully inserted.
You can choose whether to set the lower or upper end position first.
The time between each button combination should not exceed 6 seconds.
Otherwise, the setting status is aborted.
With some roller blind fabrics, enormous temperature fluctuations cause the fabric
length to change. Depending on the fabric and overall length, in extreme cases, there
can be a shortening in cold weathers and a lengthening at high temperatures, which
can even be in the centimetre range. Especially for cassette systems it is absolutely
necessary not to parameterize the upper end position up to the stop but to leave at
least 1 cm clearance!
Setting the end position: The setting of the upper end position is shown in the following.
Thus, the upper end position is set. The setting of the lower end position is analogous by
replacing the up button with the down button. If both end positions are set, the drive will
automatically stop at the respective end positions during operations.
Changing the end position (option): The following shows how to change the upper end position.
Thus, the upper end position is changed. You can also change the lower end position in the
same way.
1. Press the up
button and let the
drive move upwards.
3. Press and hold the up and stop
buttons simultaneously until the
motor reacts with two up/down
movements. Release the buttons
again.
1. Press and hold the up
and stop buttons
simultaneously until the
drive reacts with a singe
up/down movement.
Release the buttons
again.
2. Then move the
drive to the new
desired end position
using the up and
down buttons.
3. Press and hold the up and
stop buttons simultaneously
again until the drive reacts
with two up/down
movements. Release the
buttons.
2. Press the stop
button when the
motor has reached
the desired upper
end position.

6
6. Setting a desired middle position (optional)
You can set a middle position of your choice as an option.
The middle position can only be set after the two end positions have been set.
Setting the desired middle position:
The middle position is now set. You can move your drive to this position by pressing and holding
the stop button.
Deleting the middle position:
The middle position is hereby deleted.
7. Reset to factory settings
Press and hold the learn button on the motor
head with an object until the drive reacts only
4 times with a short up/down movement.
Release the learn button again. The motor is
now set to the factory settings. All previous
connections and settings are deleted.
1. Move the drive to the
desired middle position.
Press the P2 button once.
The drive confirms with an
up/down movement.
2. Then press the stop
button once. The drive
confirms with an
up/down movement.
3. Press the stop button
again. The drive confirms
with two up/down
movements.
1. Move the drive to the
middle position. Press the
P2 button once. The drive
confirms with an up/down
movement.
2. Then press the stop
button once. The drive
confirms with an
up/down movement.
Ab-Bewegung.
3. Press the stop button
again. The drive confirms
with one up/down
movement.
7
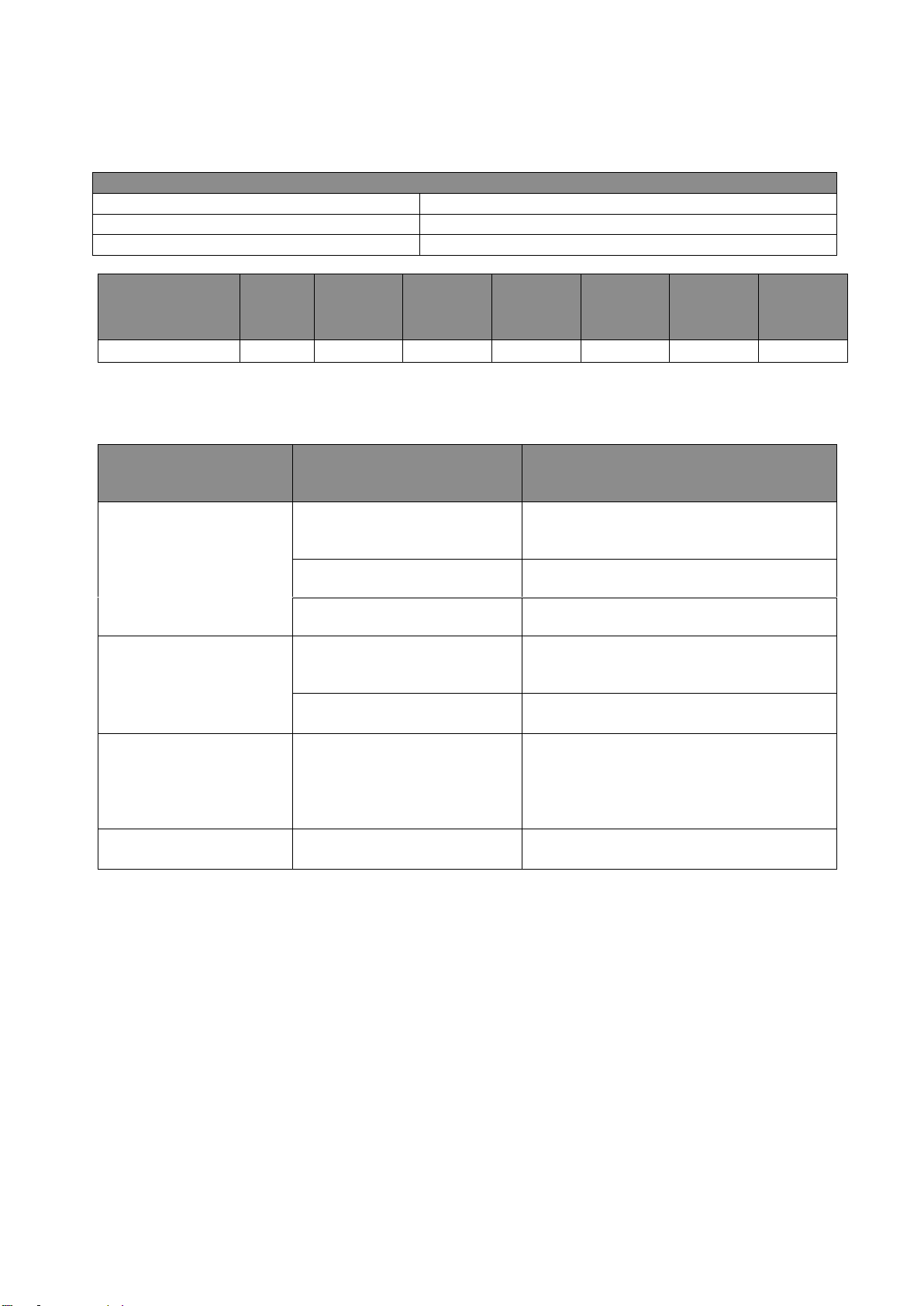
8. Technical data
Technical data
Power supply:
USB
Protection class:
IP22
Operating temperature:
0°C to +50°C
Definition
Diameter
D
(mm)
Length
L
(mm)
Torque
(Nm)
Rotational
speed
(U/min)
Perfor-
mance
(W)
Power
input
(mA)
Weight
(g)
ERBS15LE
16
370
0,3
30
5
600
150
9. Bug fixing
Problem
Possible cause
Solution
Drive does not run
Battery weak
Charge the drive via the mains
connection on the motor head with
the micro -USB charging cable.
Remote controller without
function
Change to a new battery.
Transmitter is not set up
Establish the connection between the
motor and the transmitter (see 3.2).
Drive is very slow,
even with charged
battery
Incorrect installation
Make sure that the shaft, materials
and drive can move freely.
Overloading
Check the loaded weight.
Drive stops in-
between both end
positions
Adapter or roller capsule
not positioned correctly
Check that the adapter is correctly
seated on the groove provided in the
crown and, if necessary, screw the
roller capsule into the shaft with a
locking screw.
The end position
changes marginally
Fabric changes due to
temperature differences
Reset end position (see 5).
10. Warranty conditions
SIRO Antriebs- und Steuerungstechnik offers a 2-year warranty on new drives that have been
professionally installed and properly operated in accordance with the installation instructions.
The warranty covers all design faults, material defects and manufacturing faults.
Any defects occurring within the warranty period will be remedied by SIRO free of charge by
supplying an equivalent or new product. Replacement delivery for warranty reasons does not
result in general extensions of the original warranty period.
Any claims for compensation beyond this are excluded.
Table of contents
Other Siro DC Drive manuals



Popular DC Drive manuals by other brands

HAUTAU
HAUTAU EM3 Mounting instructions

Dorner
Dorner 2100 Series Installation, maintenance & parts manual

ABB
ABB ACSM1-04 Series Quick installation guide

American Control Electronics
American Control Electronics Minarik Drives MDBL05 manual

ABB
ABB Relion 615 series manual

Masterflex
Masterflex 7554-80 operating manual







Chauvet Professional
Chauvet Professional onAir Flex Drive 2 Quick reference guide

ABB
ABB ACS880-04 drive modules Application guide

ABB
ABB ACS880-207 Hardware manual

Danfoss
Danfoss VLT series Service manual

WEG
WEG CFW300 V1.3X Programming manual

Rockwell Automation
Rockwell Automation Allen-Bradley PowerFlex 7000 user manual