SperryMarine NAVIGAT X MK1 Manual

kçêíÜêçé=dêìãã~å=péÉêêó=j~êáåÉ=_KsK=EoÉéêÉëÉåí~íáîÉ=lÑÑáÅÉF
tçäíã~åëíêK=N =√=aJOMM T=√=e~ãÄìêÖI=dÉêã~åó
qÉäKW HQ JQMJO MMJM=√=c~ñW HQ JQMJO MMJNQS=√=bJã~áäW ëÉêîáÅÉKÇÉ]ëéÉêêóKåÖÅKÅçã
léÉê~íáçåI=fåëí~ää~íáçå=~åÇ=pÉêîáÅÉ=j~åì~ä
lêáÖáå~ä=açÅìãÉåí~íáçå=L=hÉÉé=Ñçê=cìíìêÉ=oÉÑÉêÉåÅÉ
k^sf ^q u jh N
aáÖáí~ä= óêçÅçãé~ëë=póëíÉãë
qóéÉ=QVNQJ`^I=píçÅâ=kçK=TQUMT=~åÇ=qóéÉ=QVNQJ``I=píçÅâ=kçK=TQUNN
MQVNQJMNOUJMN
MRSPQPLcI=PM=pÉé=OMNQ

MRSPQPLc k^sfd^q u jh N
© 2014 Northrop Grumman Sperry Marine B.V.
This document and the information herein is the intellectual property of Northrop Grumman
Sperry Marine B.V. NGSM BV] and it’s associate companies and may not be copied, reproduced
or translated without the express permission of NGSM BV.
Specifications were correct at time of press but may be varied in accordance with NGSM BV’s
policy of continuous product development.
Any technical content should be verified with NGSM BV.
Sperry Marine, with major engineering and support offices in New Malden, England, and
Hamburg, Germany, is part of the Northrop Grumman Navigation & Maritime Systems Division
N&MSD.
oÉîáëáçå=oÉÅçêÇ
oÉîK a~íÉ oÉã~êâë
F 30 Sep 2014 Updated version, polar waters recommendations added, recom-
mended install and EMC conditons added, spare parts amended.
E 11 Nov 2013 Factory setting menu (technical pages) amended, service setup 2
amended, installation procedure and power-up function test amended.
D 11 Sep 2013 Updated version, new service setup options (Course Bus, THS/HDT,
ROT filter) added; technical data amended, checklist procedures
added, spare parts added; chapter removal/installation added.
C 08 May 2008 Added new options (AD10 output, alarm mute relay, speed filter).
B 17 Nov 2006 Removed gyrosphere installation/service instructions. These are now
contained in separate documents delivered with the respective gyro-
sphere and container.
All information regarding the master PCB refers to the new PCB, stock
no. 20672.
A 18 Jan 2005 Initial release.

k^sfd^q u jh N MRSPQPLc
ááá
`çåíÉåíë
p~ÑÉíó=fåëíêìÅíáçåë
p~ÑÉíó=kçíáÅÉ=`çåîÉåíáçåëKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK îáá
ÉåÉê~ä=p~ÑÉíó=fåÑçêã~íáçå=Ñçê=íÜÉ=léÉê~íçê KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK îááá
ÉåÉê~ä=p~ÑÉíó=fåÑçêã~íáçå=Ñçê=pÉêîáÅÉ=mÉêëçååÉäKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK ñááá
`Ü~éíÉê=NW fåíêçÇìÅíáçå
NKN póëíÉã=aÉëÅêáéíáçåKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK NJN
fåíÉåÇÉÇ=rëÉ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKNJN
kçí=fåíÉåÇÉÇ=rëÉKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKNJN
NKO póëíÉã=lîÉêîáÉï=~åÇ=j~áå=`çãéçåÉåíë KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK NJO
i~ÄÉä=~åÇ=íóéÉ=ä~ÄÉä KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKNJP
j~áå=ÅçãéçåÉåíë KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKNJQ
NKP aÉëáÖå=~åÇ=j~áå=cÉ~íìêÉëKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK NJS
NKQ léÉê~íáåÖ=mêáåÅáéäÉ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK NJT
eÉ~ÇáåÖ=bêêçê=i~íáíìÇÉ=`çêêÉä~íáçå KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKNJ
NKR bñ~ãéäÉ=póëíÉã=`çåÑáÖìê~íáçåë KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKNJNN
pí~åÇ~äçåÉ=dóêçÅçãé~ëëLqj`=póëíÉã KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK NJNN
aì~ä=k^sfd^q u jh N=dóêçÅçãé~ëëLqj`=póëíÉã KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKNJNO
NKS qÉÅÜåáÅ~ä=a~í~KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK NJNP
^ÅÅìê~ÅáÉëKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKNJNP
léÉê~íáçå~ä=`Ü~ê~ÅíÉêáëíáÅë KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKNJNP
båîáêçåãÉåí~ä=oÉèìáêÉãÉåíëKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKNJNP
mçïÉê=pìééäó KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKNJNQ
aáãÉåëáçåë=~åÇ=tÉáÖÜíKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKNJNR
fåéìíë=L=lìíéìíë KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKNJNR
NKT j~êáåÉ=bèìáéãÉåí=aáêÉÅíáîÉ=b`=aÉÅä~ê~íáçå=çÑ=`çåÑçêãáíóKKKKKKKKKKKKKKKK NJNT
`Ü~éíÉê=OW léÉê~íáçå
OKN léÉê~íáåÖ=`çåÇáíáçåë KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJN
OKO aáëéä~ó=~åÇ=léÉê~íáåÖ=hÉóë KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJO
`çåíêçä=~åÇ=aáëéä~ó=råáí=E`arF KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJO
OKP bñíÉêå~ä=`çåíêçä=aÉîáÅÉë KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJP
OKQ mçïÉêJìé=pÉèìÉåÅÉ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJQ
OKR pÉäÉÅíáåÖ=íÜÉ=^ÅíáîÉ=eÉ~ÇáåÖ=pçìêÅÉKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJR
OKS ^ÇàìëíáåÖ=íÜÉ=aáëéä~ó=_êáÖÜíåÉëë KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJS
OKT léíáçå~ä=cìåÅíáçåëKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJS
jìíáåÖ=^ä~êãë=oÉãçíÉäó KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJS
oÉîÉêëáåÖ=íÜÉ=eÉ~ÇáåÖ=aáëéä~ó=ENUMø=çÑÑëÉíFKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJS
oÉëÉííáåÖL^ÅâåçïäÉÇÖáåÖ=~=`Éåíê~ä=t~íÅÜ=^ä~êã KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJS
OKU léÉê~íáåÖ=jÉåì KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJT
båíÉêáåÖ=~åÇ=nìáííáåÖ=íÜÉ=j~áå=jÉåìKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJT
k~îáÖ~íáåÖ=íÜÉ=jÉåìKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJT

MRSPQPLc k^sfd^q u jh N
áî
pÉäÉÅíáåÖ=m~ê~ãÉíÉê=pÉííáåÖë KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJU
bÇáíáåÖ=m~ê~ãÉíÉê=s~äìÉë KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJU
OKV pÉäÉÅíáåÖ=~=aáëéä~ó=a~í~=m~ÖÉKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJV
OKNM j~åì~ä=pÉííáåÖë=jÉåì KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJNM
`~éíáçå=Ñçê=pÉäÉÅíáåÖ=~åÇ=bÇáíáåÖ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJNM
j~åì~ä=pÉííáåÖë=Ó=lîÉêîáÉï KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKOJNN
j~åì~ä=pÉííáåÖë=Ó=m~ê~ãÉíÉêë KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJNP
OKNN rëÉê=pÉíìé KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJNT
rëÉê=pÉíìé=Ó=lîÉêîáÉï KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJNT
rëÉê=pÉíìé=Ó=m~ê~ãÉíÉêë KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK OJNU
`Ü~éíÉê=PW bêêçêë=~åÇ=^ä~êãë
PKN ^ä~êã=fåÇáÅ~íáçå KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK PJN
^ìÇáÄäÉ=^ä~êã=fåÇáÅ~íáçåKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK PJN
sáëì~ä=^ä~êã=fåÇáÅ~íáçå KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK PJN
PKO ^ÅâåçïäÉÇÖáåÖ=^ä~êãëLjìíáåÖ=íÜÉ=^ìÇáÄäÉ=^ä~êã KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK PJO
^ä~êã=^ÅâåçïäÉÇÖÉ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK PJO
^ä~êã=jìíÉ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK PJO
PKP bêêçê=ãÉëë~ÖÉë KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK PJP
`Ü~éíÉê=QW pÅÜÉÇìäÉÇ=j~áåíÉå~åÅÉ
QKN j~áåíÉå~åÅÉ=çÑ=íÜÉ=k^sf ^q=u=jh=N KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK QJN
`äÉ~åáåÖ=çÑ=`çãé~ëë=eçìëáåÖ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK QJN
`äÉ~åáåÖ=çÑ=^áê=fåäÉí=dêáääKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK QJN
QKO óêçëéÜÉêÉ=j~áåíÉå~åÅÉ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK QJO
NUJjçåíÜ=j~áåíÉå~åÅÉ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK QJO
dóêçëéÜÉêÉ=oÉéä~ÅÉãÉåí=L=cáîÉJvÉ~ê=j~áåíÉå~åÅÉKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK QJP
`Ü~éíÉê=RW mêÉîÉåíáîÉ=j~áåíÉå~åÅÉ
RKN mêçíÉÅíáåÖ=íÜÉ= óêçëéÜÉêÉ=Ñêçã=a~ã~ÖÉ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK RJN
dóêçëéÜÉêÉ=a~ã~ÖÉ=Å~ìëÉÇ=Äó=içï=qÉãéÉê~íìêÉë KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK RJN
dóêçëéÜÉêÉ=a~ã~ÖÉ=íÜêçìÖÜ=pÜìí=açïå KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK RJO
RKO oÉãçîáåÖ=íÜÉ= óêçëéÜÉêÉ=`çåí~áåÉê=Ñêçã=íÜÉ=`çãé~ëë=eçìëáåÖ KKKKKK RJP
RKP fåëí~ääáåÖ=íÜÉ= óêçëéÜÉêÉ=`çåí~áåÉê=áå=íÜÉ=`çãé~ëë=eçìëáåÖKKKKKKKKKKKKK RJS
RKQ mçïÉêJìé=cìåÅíáçå=qÉëíKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK RJV
dóêçëéÜÉêÉ=`ìêêÉåí=mêÉäáãáå~êáÉë KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK RJ
m~êíëI=ã~íÉêá~äë=~åÇ=íççäë=êÉèìáêÉÇKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK RJNM
mêçÅÉÇìêÉ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK RJNM
`Ü~éíÉê=SW oÉãçî~äLfåëí~ää~íáçå=çÑ=`çãéçåÉåíë
SKN oÉãçîáåÖ=póëíÉã=`çãéçåÉåíë=Ñêçã=íÜÉ=`çãé~ëë=KKKKKKKKKKKKKKKKKKKKKKKKKKKKK SJN
mêçÅÉÇìêÉ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK SJO
SKO fåëí~ääáåÖ=póëíÉã=`çãéçåÉåíë=áåíç=íÜÉ=`çãé~ëëKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK SJV
mêçÅÉÇìêÉ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK SJ

k^sfd^q u jh N MRSPQPLc
î
`Ü~éíÉê=TW póëíÉã=fåëí~ää~íáçå
TKN fåëí~ääáåÖ=oÉÅçããÉåÇ~íáçåë KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJN
mä~ÅÉ=çÑ=fåëí~ää~íáçå KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJN
sÉåíáä~íáçå=L=qÉãéÉê~íìêÉ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJN
bäÉÅíêçã~ÖåÉíáÅ=fåíÉêÑÉêÉåÅÉKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJN
sáÄê~íáçå KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJO
TKO jÉÅÜ~åáÅ~ä=fåëí~ää~íáçåKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJP
qê~åëéçêíáåÖ=íÜÉ=`çãé~ëë=eçìëáåÖ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJP
fåëí~ääáåÖ=íÜÉ=`çãé~ëë=eçìëáåÖ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJP
TKP bäÉÅíêáÅ~ä=fåëí~ää~íáçå KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJQ
^`=pìééäó=mçïÉê=`çåÑáÖìê~íáçå KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJQ
táêáåÖ=ré=íÜÉ=póëíÉã KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJR
TKQ óêçëéÜÉêÉ=fåëí~ää~íáçå KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJS
TKR fåáíá~ä=póëíÉã=`çåÑáÖìê~íáçå KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJT
`çåÑáÖìê~íáçå=çÑ=íÜÉ=póëíÉã KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJT
cáå~äáòáåÖ=íÜÉ=fåëí~ää~íáçå KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJU
TKS ^äáÖåãÉåí=bêêçê=`çêêÉÅíáçå KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJV
TKT j~ÖåÉíáÅ=`çãé~ëë=`~äáÄê~íáçåKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKTJNM
TKU fåëí~ää~íáçå=`ÜÉÅâ=mêçÅÉÇìêÉëKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK TJNP
jÉÅÜ~åáÅ~ä=fåëí~ää~íáçå=`ÜÉÅâ=mêçÅÉÇìêÉKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKTJNP
bäÉÅíêáÅ~ä=fåëí~ää~íáçå=`ÜÉÅâ=mêçÅÉÇìêÉ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKTJNP
båîáêçåãÉåí~ä=`çåÇáíáçåë=`ÜÉÅâ=mêçÅÉÇìêÉ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKTJNQ
póëíÉã=`çåÑáÖìê~íáçå=`ÜÉÅâ=mêçÅÉÇìêÉKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKTJNQ
`Ü~éíÉê=UW póëíÉã=`çåÑáÖìê~íáçå
UKN `çåÑáÖìê~íáçå=jÉåì=J=pÉêîáÅÉ=pÉíìé=NKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK UJN
pÉíìé=^ÅÅÉëë=`çÇÉKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK UJN
pÉêîáÅÉJpÉíìé=N=Ó=lîÉêîáÉïKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK UJO
pÉêîáÅÉ=pÉíìé=N=Ó=m~ê~ãÉíÉêëKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK UJS
UKO pÉêîáÅÉ=fåÑç=jÉåì=J=pÉêîáÅÉ=pÉíìé=O KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK UJOM
pÉêîáÅÉ=pÉíìé=O=Ó=^ÅÅÉëë=`çÇÉ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK UJOM
pÉêîáÅÉ=pÉíìé=O=Ó=lîÉêîáÉïKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK UJON
pÉêîáÅÉ=pÉíìé=O=Ó=m~ê~ãÉíÉêëKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK UJOO
UKP c~Åíçêó=pÉííáåÖë=jÉåì=EqÉÅÜåáÅ~ä=m~ÖÉëF KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK UJOQ
pÉíìé=^ÅÅÉëë=`çÇÉKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK UJOQ
qÉÅÜåáÅ~ä=m~ÖÉë=Ó=lîÉêîáÉï KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK UJOQ
qÉÅÜåáÅ~ä=m~ÖÉë=Ó=m~ê~ãÉíÉêë KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK UJOR
`Ü~éíÉê=VW qêçìÄäÉëÜççíáåÖ
VKN qêçìÄäÉëÜççíáåÖ=fåëíêìÅíáçåë KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK VJN
VKO içÅ~íáçå=çÑ=m~êíë=çå=íÜÉ=j~ëíÉê=m`_ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK VJO
bñÅÜ~åÖÉ~ÄäÉ=`çãéçåÉåíëKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK JP
`çååÉÅíçêëKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK JP
qÉëí=oÉëáëíçê=L=qêáãéçíëKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK JQ
aá~ÖåçëíáÅ=ibaëKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK JQ

MRSPQPLc k^sfd^q u jh N
îá
`Ü~éíÉê=NMW `çêêÉÅíáîÉ=j~áåíÉå~åÅÉ
NMKN bñÅÜ~åÖáåÖ=íÜÉ=póëíÉã=pçÑíï~êÉ KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK NMJN
NMKO oÉéä~ÅáåÖ=pçÅâÉíÉÇ=f`ëKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK NMJO
`Ü~éíÉê=NNW k^sf ^q u=jhN=pé~êÉ=m~êíë
NNKN fääìëíê~íÉÇ=m~êíë=iáëí=EfmiF=lîÉêîáÉï KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK NNJN
^ÄÄêÉîá~íáçåë
^ééÉåÇáñ
^ pÉíìé=~åÇ=`çåÑáÖìê~íáçå=q~ÄäÉë
_ aê~ïáåÖë
k^sfd^q u jh N MRSPQPLc
p~ÑÉíó=fåëíêìÅíáçåë îáá
p~ÑÉíó=fåëíêìÅíáçåë
p~ÑÉíó=kçíáÅÉ=`çåîÉåíáçåë
The following safety notice conventions are followed throughout this
manual:
a^k bo
A a~åÖÉê notice begins with the named type of
danger and contains an operating or mainte-
nance procedure, practice, condition, statement,
etc., which, if not strictly observed, ïáää=êÉëìäí=áå=
áåàìêó=çê=ÇÉ~íÜ=çÑ=éÉêëçååÉäK
t^okfk
A t~êåáåÖ notice begins with the named type of
warning and contains an operating or mainte-
nance procedure, practice, condition, statement,
etc., which, if not strictly observed, ÅçìäÇ=êÉëìäí=
áå=áåàìêó=çê=ÇÉ~íÜ=çÑ=éÉêëçååÉäK
`^rqflk
A `~ìíáçå notice begins with the named type of
caution and contains an operating or mainte-
nance procedure, practice, condition, statement,
etc., which, if not strictly observed, ÅçìäÇ=êÉëìäí=
áå=Ç~ã~ÖÉ=íçI=çê=ÇÉëíêìÅíáçå=çÑ=ÉèìáéãÉåíK
kçíÉ
A kçíÉ contains an essential operating or main-
tenance procedure, condition or statement,
which is considered important enough to be
highlighted.
Special safety symbols may be used in this
manual to indicate:
oáëâ=çÑ=ÉäÉÅíêáÅ~ä=ëÜçÅâK
Used in conjunction with a a~åÖÉê or t~êåáåÖ
notice.
Electrical components sensitive to electrostatic
discharge.
Used in conjunction with a `~ìíáçå notice.
MRSPQPLc k^sfd^q u jh N
îááá p~ÑÉíó=fåëíêìÅíáçåë
ÉåÉê~ä=p~ÑÉíó=fåÑçêã~íáçå=Ñçê=íÜÉ=léÉê~íçê
t^okfk
oáëâ=çÑ=ÇÉîá~íáçå
kÉîÉê=êÉäó=çå=çåÉ=ÜÉ~ÇáåÖ=ëçìêÅÉ=~äçåÉ=íç=å~îáÖ~íÉ=~=îÉëëÉäK
^äï~óë=ÅçåÑáêã=íÜÉ=éä~ìëáÄáäáíó=çÑ=íÜÉ=k^sf ^q u jh N=ÜÉ~ÇáåÖ=~åÇ=íÜÉ=
ëéÉÉÇ=~åÇ=éçëáíáçå=áåéìí=Ç~í~=~Ö~áåëí=~ää=~î~áä~ÄäÉ=~áÇë=íç=å~îáÖ~íáçåK
t^okfk
iáãáíÉÇ=ÜÉ~ÇáåÖ=Ç~í~=~ÅÅìê~Åó=ÇìêáåÖ=ëÉííäáåÖ=íáãÉ
^ÑíÉê=~=éçïÉêJìé=Ñêçã=ÅçäÇI=íÜÉ=k^sf ^q u jh N=êÉèìáêÉë=~=ëÉííäáåÖ=íáãÉ=
çÑ=íÜêÉÉ=Üçìêë=ÄÉÑçêÉ=êÉäá~ÄäÉ=ÜÉ~ÇáåÖ=Ç~í~=áë=~î~áä~ÄäÉK
mçïÉê=ìé=íÜÉ=ëóëíÉã=~í=äÉ~ëí=íÜêÉÉ=Üçìêë=ÄÉÑçêÉ=äÉ~îáåÖ=Ü~êÄçìêK
mçïÉê=Ççïå=íÜÉ=ëóëíÉã=ÇìêáåÖ=äçåÖ=ÇçÅâáåÖ=éÉêáçÇë=çåäóK
j~âÉ=ëìêÉ=íÜ~í=íÜÉ=k^sf ^q u jh N=Ü~ë=ëÉííäÉÇ=ÄÉÑçêÉ=ìëáåÖ=áíë=ÜÉ~ÇáåÖ=
~ë=íÜÉ=êÉÑÉêÉåÅÉ=Ñçê=ÜÉ~ÇáåÖ=Åçåíêçä=ëóëíÉãëI=o^a^oI=b`afpI=ÉíÅK
^=ã~ÖåÉíáÅ=Åçãé~ëë=ÜÉ~ÇáåÖ=ëçìêÅÉ=ëÜçìäÇ=ÄÉ=ëÉäÉÅíÉÇ=~ë=êÉÑÉêÉåÅÉ=
çåäó=áå=Å~ëÉ=çÑ=Ñ~áäìêÉ=çÑ=íÜÉ=ÖóêçÅçãé~ëëEÉëFK
t^okfk
oáëâ=çÑ=ãáëìë~ÖÉ
_ÉÑçêÉ=ìëáåÖ=íÜÉ=k^sf ^q u jh NI=çéÉê~íçêë=ãìëí=ÄÉ=~ééêçéêá~íÉäó=
íê~áåÉÇ=~åÇ=Ñ~ãáäá~ê=ïáíÜ=~ää=çéÉê~íáåÖ=éêçÅÉÇìêÉë=~åÇ=ë~ÑÉíó=áåëíêìÅJ
íáçåë=Åçåí~áåÉÇ=áå=íÜáë=ã~åì~äK=qÜÉ=ã~åì~ä=áë=íç=ÄÉ=ÅçãéäÉíÉäó=êÉ~Ç=
ÄÉÑçêÉ=íÜÉ=Ñáêëí=ìë~ÖÉ=çÑ=íÜÉ=k^sf ^q u jh NK
hÉÉé=íÜáë=ã~åì~ä=ÇìêáåÖ=íÜÉ=ÉåíáêÉ=ëÉêîáÅÉ=äáÑÉ=çÑ=íÜÉ=éêçÇìÅí=~åÇ=~äï~óë=
Ü~îÉ=áí=êÉ~Çáäó=~î~áä~ÄäÉ=áå=~=åÉ~êÄó=äçÅ~íáçå=Ñçê=êÉÑÉêÉåÅÉK
`^rqflk
Risk of damage/destruction through low temperatures
The supporting fluid in the gyrosphere container will start freezing at
temperatures below 0° C.
The NAVIGAT X MK 1 must no longer be operated when the ambient tem-
perature at the gyrocompass’ location falls below - 10° C while the com-
pass is in operation or when the ambient temperature falls below 0° C
while the gyrocompass is not in operation.
Always make sure, that the ambient temperature is higher than 0° C
respective 10° C. If this is not possible, the gyrosphere container with
gyrosphere must be removed from the NAVIGAT X MK 1 and transported
to a place with sufficient ambient temperature.
Make sure to remove the gyrosphere from the gyrosphere container if no
place with sufficient ambient temperature is available to eliminate dam-
age from freezing supporting fluid. The removal is to be executed in a
service work procedure by authorized service personnel only.
`^rqflk
Risk of damage through rotating masses
After power-down of the compass system, the gyroscopes need at least
45 minutes to stop rotating. Opening the container or draining off the
supporting fluid during rotating will damage the gyrosphere.
Wait at least 45 minutes after power-down of the compass system and
make sure, that the gyroscopes have stopped rotating before opening the
container or draining off the supporting fluid.
`^rqflk
Risk of damage through inadequate cleaning solvents
Do not clean the compass housing with organic solvents, acetone or any
other substance which could damage or discolour plastic.
Use only soapy water or a mild detergent to clean the compass housing.

k^sfd^q u jh N MRSPQPLc
p~ÑÉíó=fåëíêìÅíáçåë áñ
`^rqflk
Risk of damage through overheating
A polluted or clogged air inlet grill located at the back side of the compass
housing will decrease the functionality of the cooling fan and cause over-
heating of the gyrocompass.
Always maintain the required distances around the compass housing to
enable sufficient air supply and full cooling fan functionality.
Make sure to regularly clean the air inlet grill from dust and dirt and check
the fan functionality to avoid overheating.
`^rqflk
Risk of damage through unauthorized service
Any service and installation work on the gyrosphere is to be carried out
by authorized service personnel only.
Never undertake service or installation work if unskilled for the certain
procedure.
`^rqflk
Risk of damage through unauthorized service
Only authorized service personnel is allowed to remove the gyrosphere
from the gyrosphere container.
Always keep to the mandatory safety requirements and the correct serv-
ice work procedure to remove the gyrosphere from the gyrosphere con-
tainer.
`^rqflk
Risk of damage through unauthorized service
Only authorized service personnel is allowed to remove gyrocompass
system components from the compass housing.
Always keep to the mandatory safety requirements and the correct serv-
ice work procedures to remove gyrocompass system components from
the compass housing.
`^rqflk
Risk of damage to the gyrosphere
The gyrosphere is always to be transported in its carrying box in the orig-
inal transport container.
Do not throw or drop the transport container.
The transport container is to be transported in an upright position only.
`^rqflk
Risk of damage to the gyrosphere
Carry the carrying box containing the gyrosphere by hand only and han-
dle it with extreme care.
Remove the gyroshpere from the carrying box only if required for imme-
diate installation.
`^rqflk
Risk of data loss through shutdown of the compass / power-off condition
After a shutdown of the compasses main and backup power supplies it
cannot be guaranteed that all menu settings remain stored unchanged.
Always check whether the shaft correction angle and alignment error cor-
rection values are noted correctly in the setup tables, before switching-
off the power supplies, see “Setup and Configuration Tables” on page A-
1 Appendix.
Always make sure to separately note the shaft correction angle and align-
ment error correction values before switching-down the compass for
maintenance or repair purposes.
MRSPQPLc k^sfd^q u jh N
ñ p~ÑÉíó=fåëíêìÅíáçåë
`^rqflk
Risk of defective gyrosphere caused by “GYRO FAILURE”
Should a “GYRO FAILURE” alarm occur during power-up, the compass
is not working properly.
De-energize the system and visually check the connections to the gyro-
sphere, the follow-up step motor and the shaft encoder.
If the failure reoccurs when the compass is powered-up again, the instal-
lation has not been carried out correctly or the gyrosphere is defective
and must be replaced.
`^rqflk
Risk of defective gyrosphere
The gyrosphere may not be in operable working condition, if after a time
period of around 45 minutes after power-up the gyrosphere current has
not dropped below 320 mA.
If a visual inspection reveals no obvious cause of malfunction, the power-
up cycle of the gyrosphere must be completely repeated.
If after a time period of around 45 minutes after the second power-up
cycle the gyrosphere current has still not dropped below 320 mA, the
gyrosphere may not be in operable working condition.
Contact the Sperry Marine Service for advice.
`^rqflk
Risk of misleading gyrosphere data / operating values
The temperature and gyrosphere current values are indicated as reading
values at the CDU only.
Both values can be adjusted via correction values, which are set to neu-
tral (= no correction) values by default.
Therefore the indicated values may deviate from real gyrosphere operat-
ing values, which can only be measured at the required checkpoints by
authorized service personnel.
`^rqflk
Risk of inadequate correction values
Any wrongful or not instructed adjustment of the temperature and gyro-
sphere correction values will falsify a correct identification of the
NAVIGAT X MK 1 system‘s operating conditions.
Only authorized service personnel is allowed to change the temperature
and gyrosphere current correction values.
Never alter the correction values unless specifically instructed by Sperry
Marine.
`^rqflk
Risk of inadequate testing / test values
The usage of any voltmeter NOT true RMS for testing will falsify the test
results.
The usage of a multimeter true RMS is absolutely mandatory.
Newer use a voltmeter not true RMS for testing purposes.
`^rqflk
Risk of damage through inadequate operating conditions
Inadequate operating conditions such as e.g. ambient over temperature
or inadequate ventilation, can damage the gyrocompass and decrease
the system performance and the longevity of the system components.
Always keep to the recommended install and environmental conditions
to ensure trouble free operation and best performance of the gyrocom-
pass. Always maintain adequate ventilation at install place.
Additional ventilation may become necessary to meet required ambient
environmental conditions for best performance and system longevity.
k^sfd^q u jh N MRSPQPLc
p~ÑÉíó=fåëíêìÅíáçåë ñá
`^rqflk
Risk of unstable/unreliable heading in polar waters
When operating the vessel in polar waters, the heading information of
the gyrocompass may become unstable/unreliable resulting in possible
deviation.
For safe steering in polar waters, the heading information of the gyro-
compass may therefore NOT be used for navigation and heading infor-
mation of a GNSS (Global Navigation Satellite System) compass be
preferred instead.
kçíÉ
The definition of polar waters follows E190E IMO Guidelines for ships
operating in polar waters and is illustrated in
‘Polar Waters Definition” on page 1-9.
`^rqflk
Risk of damage to the gyrosphere through shut-down
A shut down of the NAVIGAT X MK 1 system, while the vessel is navigat-
ing, will damage the gyrosphere, as the gyrosphere is only self protected
against physical damage, as long as the system is running.
NEVER shut down the NAVIGAT X MK 1, while the vessel is navigating.
A shut down of the NAVIGAT X MK 1 system for good reason is only pos-
sible when the ship is NOT navigating.
kçíÉ
Sperry Marine requires to NOT shut down the NAVIGAT X MK 1 system
as long as the vessel is navigating, even when operating in polar waters
with possible unstable/unreliable heading.
`^rqflk
Risk of damage through overheating
A polluted or clogged air inlet grill located at the back side of the compass
housing will decrease the functionality of the cooling fan and cause over-
heating of the gyrocompass.
Always maintain the required distances around the compass housing to
enable sufficient air supply and full cooling fan functionality.
Make sure to regularly clean the air inlet grill from dust and dirt and check
the fan functionality to avoid overheating.
kçíÉ
A visual inspection of cables and connectors of the gyrocompass should
be carried out regularly to detect any signs of damage or deterioration.
kçíÉ
This Operation, Installation and Service Manual 056343 applies only for
NAVIGAT X MK 1 systems with the new type master PCB and the PCB
transformer on the rear side.
For NAVIGAT X MK 1 systems with the old type master PCB and the PCB
transformer on the front side, only the Operation, Installation and Service
Manual 056310 is applicable.
kçíÉ
In case a „Speed Invalid“ alarm is triggered while the vessel is not in
motion or moving very slowly (e.g. when manoeuvring in harbour), this
is often caused by fast currents of fairway water increasing the - 5.0 kn
minimum speed default value.
In this case, the minimum speed value must be adjusted accordingly.
MRSPQPLc k^sfd^q u jh N
ñáá p~ÑÉíó=fåëíêìÅíáçåë
kçíÉ
The access code for the setup menu to reset the gyrosphere operation
time counter is disclosed to authorized service personnel only and is not
described in this manual.
kçíÉ
Sperry Marine Service:
In case of service refer to www.sperrymarine.com/offices for a list of all
Sperry Marine Offices and Service Agents worldwide.

k^sfd^q u jh N MRSPQPLc
p~ÑÉíó=fåëíêìÅíáçåë ñááá
ÉåÉê~ä=p~ÑÉíó=fåÑçêã~íáçå=Ñçê=pÉêîáÅÉ=mÉêëçååÉä
a^k bo
iáÑÉ=Ç~åÖÉê=íÜêçìÖÜ=ÉäÉÅíêáÅ~ä=ëÜçÅâ
tÜÉå=íÜÉ=Åçãé~ëë=áë=ÉåÉêÖáòÉÇI=íÜÉ=ÖóêçëéÜÉêÉ=çéÉê~íáåÖ=îçäí~ÖÉ=çÑ=
NMM=s^`=]=PPT=eò=áë=éêÉëÉåí=çå=íÜÉ=ã~ëíÉê=m`_I=íÜÉ=ÖóêçëéÜÉêÉ=ëìééäó=
äáåÉëI=~åÇ=~Åêçëë=íÜÉ=ÖóêçëéÜÉêÉ=Åçåí~ÅíëK=
tÜÉå=íÜÉ=^`=ã~áå=ëìééäó=áë=ëïáíÅÜÉÇ=çåI=Ü~ò~êÇçìë=äáÑÉ=îçäí~ÖÉë=~êÉ=
éêÉëÉåí=~í=íÜÉ=äáåÉ=ÑáäíÉê=~åÇ=íÜÉ=éçïÉê=íê~åëÑçêãÉêÛë=íÉêãáå~äëK
j~âÉ=ëìêÉ=íÜ~í=íÜÉ=ã~áå=~åÇ=Ä~Åâìé=éçïÉê=ëìééäáÉë=çÑ=íÜÉ=Åçãé~ëë=~êÉ=
~äï~óë=ëïáíÅÜÉÇ=çÑÑ=~åÇ=ë~ÑÉÖì~êÇÉÇ=~Ö~áåëí=~ÅÅáÇÉåí~ä=ëïáíÅÜáåÖJçå=
ÄÉÑçêÉ=ìåÇÉêí~âáåÖ=~åó=êÉãçî~ä=çê=áåëí~ää~íáçå=éêçÅÉÇìêÉë=çÑ=íÜÉ=ÖóêçJ
ëéÜÉêÉ=Åçåí~áåÉêK
a^k bo
iáÑÉ=Ç~åÖÉê=íÜêçìÖÜ=ÉäÉÅíêáÅ~ä=ëÜçÅâ
tÜÉå=íÜÉ=Åçãé~ëë=áë=ÉåÉêÖáòÉÇI=íÜÉ=ÖóêçëéÜÉêÉ=çéÉê~íáåÖ=îçäí~ÖÉ=çÑ=
NMM=s^`=]=PPT=eò=áë=éêÉëÉåí=çå=íÜÉ=ã~ëíÉê=m`_I=íÜÉ=ÖóêçëéÜÉêÉ=ëìééäó=
äáåÉë=~åÇ=~Åêçëë=íÜÉ=ÖóêçëéÜÉêÉ=Åçåí~ÅíëK=
tÜÉå=íÜÉ=^`=ã~áå=ëìééäó=áë=ëïáíÅÜÉÇ=çåI=Ü~ò~êÇçìë=äáÑÉ=îçäí~ÖÉë=~êÉ=
éêÉëÉåí=~í=íÜÉ=äáåÉ=ÑáäíÉê=~åÇ=íÜÉ=éçïÉê=íê~åëÑçêãÉêÛë=íÉêãáå~äëK
_É=ÉñíêÉãÉäó=Å~êÉÑìä=ïÜÉå=çéÉê~íáåÖ=íÜÉ=Åçãé~ëë=ïÜáäÉ=íÜÉ=ÜçìëáåÖ=áë=
çéÉåK=kÉïÉê=íçìÅÜ=íÜÉ=ã~ëíÉê=m`_I=íÜÉ=ÅçååÉÅíáåÖ=Å~ÄäÉë=íç=íÜÉ=ÖóêçJ
ëéÜÉêÉ=Åçåí~áåÉê=çê=~åó=çíÜÉê=ÅçåÇìÅíáîÉ=ÅçãéçåÉåíë=çå=íÜÉ=Åçåí~áåÉê=
çê=áå=íÜÉ=Åçãé~ëë=ÜçìëáåÖK
^äï~óë=ÉñÅäìÇÉ=~åó=Åçåí~Åí=íç=ÉåÉêÖáòÉÇ=ÅçãéçåÉåíëK
a^k bo
iáÑÉ=Ç~åÖÉê=íÜêçìÖÜ=ÉäÉÅíêáÅ~ä=ëÜçÅâ
tÜÉå=íÜÉ=^`=ã~áå=ëìééäó=áë=ëïáíÅÜÉÇ=çåI=äáîÉ=îçäí~ÖÉë=~êÉ=éêÉëÉåí=~í=íÜÉ=
äáåÉ=ÑáäíÉê=~åÇ=íÜÉ=éçïÉê=íê~åëÑçêãÉêÛë=íÉêãáå~äëK
tÜÉå=íÜÉ=Åçãé~ëë=áë=ÉåÉêÖáòÉÇ=Eã~áå=~åÇLçê=Ä~Åâìé=ëìééäó=éêÉëÉåíFI=
íÜÉ=ÖóêçëéÜÉêÉ=çéÉê~íáåÖ=îçäí~ÖÉ=çÑ=NMM=s^`=]=PPT=eò=áë=éêÉëÉåí=çå=íÜÉ=
ã~ëíÉê=m`_I=íÜÉ=ÖóêçëéÜÉêÉ=ëìééäó=äáåÉë=~åÇ=~Åêçëë=íÜÉ=ÖóêçëéÜÉêÉ=ÅçåJ
í~ÅíëK
j~âÉ=ëìêÉ=íÜÉ=Åçãé~ëëD=ã~áå=~åÇ=Ä~Åâìé=éçïÉê=ëìééäáÉë=~êÉ=~äï~óë=
ëïáíÅÜÉÇ=çÑÑ=~åÇ=ë~ÑÉÖì~êÇÉÇ=~Ö~áåëí=~ÅÅáÇÉåí~ä=ëïáíÅÜáåÖJçå=ïÜÉå=
ÅçåÑáÖìêáåÖ=íÜÉ=ëóëíÉã=Ñçê=íÜÉ=îÉëëÉäÛë=^`=ëìééäó=îçäí~ÖÉI
`^rqflk
Risk of damage/destruction during transport
The gyrosphere is always to be transported in its carrying box in the orig-
inal transport container.
Do not throw or drop the transport container.
The transport container is to be transported in an upright position only.
Carry the carrying box containing the gyrosphere by hand only and han-
dle it with extreme care. Remove the gyroshpere from the carrying box
only if required for immediate installation.
`^rqflk
Risk of damage to NAVIGAT X MK 1gyrocompass system through
inadequate install and environmental conditions
Inadequate install and environmental conditions can damage the gyro-
compass and decrease the system performance and the longevity of the
system components.
Always keep to the recommended install and environmental conditions
to ensure trouble free operation and best performance of the gyrocom-
pass system.

MRSPQPLc k^sfd^q u jh N
ñáî p~ÑÉíó=fåëíêìÅíáçåë
`^rqflk
Risk of erroneous heading accuracy caused by vibration / resonance
frequencies
The NAVIGAT X MK 1 gyrocompass is a highly sensitive instrument.
Resonance frequencies or vibrations caused by incorrect install position
or install and environmental conditions will badly influence the heading
accuracy.
Always keep to the recommended install and environmental conditions.
Never install the gyrocompass in or close the engine room or any posi-
tion where reasonable vibration / resonance frequencies levels are
exceeded. Always make sure to minimise possible resonance frequen-
cies or vibration causes at install place when installing the gyrocompass.
`^rqflk
Risk of erroneous heading accuracy caused by electromagnetic
interference (EMC)
The NAVIGAT X MK 1 gyrocompass is a highly sensitive instrument.
Electromagnetic interference of other devices or their power lines will
badly influence the heading accuracy.
Always keep to the recommended minimal clearance requirements at
install position of the gyrocompass.
Never install other electronic equipment or high voltage power lines
close to or across the compass housing.
Always make sure to minimise possible electromagnetic interference of
other devices when installing the NAVIGAT X MK 1 gyrocompass.
`^rqflk
Risk of inadequate testing / test values
The usage of any voltmeter NOT true RMS for testing will falsify the test
results.
The usage of a multimeter true RMS is absolutely mandatory.
Newer use a voltmeter not true RMS for testing purposes.
`^rqflk
Risk of damage/destruction after power-down
After power-down of the gyrocompass system, it may take up to
45 minutes for the gyroscopes to stop rotating and the gyrosphere is
therefore extremely sensible against any movement. Should the gyro-
sphere touch the wall of the container, the momentum of the rotating
gyroscopes will make it topple and damage the centre pin.
Avoid any movement of the gyrocompass system during power-down
time. Always be extremely careful in case the gyrosphere container must
be handled during power-down time.
`^rqflk
Risk of damage of electrostatic-discharge-sensitive components
The NAVIGAT X MK 1 contains electrostatic sensitive components.
Electrostatic discharge may permanently damage components.
When servicing the NAVIGAT X MK 1, take considerable precautions to
prevent electrostatic discharge. Avoid touching any of the electronic cir-
cuitry.
`^rqflk
Risk of loss of parameter settings through software exchange
It cannot be guaranteed that parameter settings in the User and Setup
menus and the entries made in the Magnetic Compass Calibration table
are left intact when the software is exchanged.
Before exchanging the system software IC, record all parameter settings
to be able to re-enter them manually, if required.

k^sfd^q u jh N MRSPQPLc
p~ÑÉíó=fåëíêìÅíáçåë ñî
`^rqflk
Risk of malfunction through wrong wiring
Wrong wiring, especially as running wires from one side of the compass
housing to the other or across the master PCB will cause malfunction.
Always use the cable inlets on both sides of the compass housing for
accurate wiring and keep all wires running inside the housing as short as
possible.
Always avoid to run wires from one side of the compass housing across
to the other.
`^rqflk
Risk of earth faults
Wrong wiring of the cable shields makes the cables act as antennas
resulting in earth faults.
Always make sure to correctly draw back the cable shields and fasten the
cables to avoid earth faults.
kçíÉ
In case of earth faults, it is recommended to always check first the cable
wiring for correctly connected cable shields.
`^rqflk
Risk of ROT filter malfunction
The selected ROT filter setting in the manual settings menu needs addi-
tional activation to gain ROT filter functionality
For activating the ROT filter setting in the service setup 1, it is mandatory
to pre-install a wire link at the master PCB TB2 19/20.
kçíÉ
To make sure, that the ROT damping time constant setting for the ana-
logue ROT output becomes effective, check if the mandatory wire link
between the master PCB TB2 19/20 is correctly installed.
`^rqflk
Risk of damage through aggressive cleaning agents
Do not clean the compass with organic solvents, acetone or any other
substance which could damage or discolour plastic.
Only use water and soap or a mild detergent to clean the compass.
`^rqflk
Risk of damage through overheating
A polluted or clogged air inlet grill located at the back side of the compass
housing will decrease the functionality of the fan and cause overheating
of the gyrocompass.
Always maintain the required distances around the compass housing to
enable sufficient air supply and full fan functionality.
Make sure to regularly clean the air inlet grill from dust and dirt and check
the fan functionality to avoid overheating.
`^rqflk
Risk of defective gyrosphere
The gyrosphere may not be in operable working condition, if after a time
period of around 45 minutes after power-up the gyrosphere current has
not dropped below 320 mA.
If a visual inspection reveals no obvious cause of malfunction, the power-
up cycle of the gyrosphere must be completely repeated.
If after a time period of around 45 minutes after the second power-up
cycle the gyrosphere current has still not dropped below 320 mA, the
gyrosphere may not be in operable working condition.
Contact the Sperry Marine Service for advice.
MRSPQPLc k^sfd^q u jh N
ñîá p~ÑÉíó=fåëíêìÅíáçåë
kçíÉ
A visual inspection of cables and connectors of the gyrocompass should
be carried out regularly to detect any signs of damage or deterioration.
kçíÉ
In case a „Speed Invalid“ alarm is triggered while the vessel is not in
motion or moving very slowly (e.g. when manoeuvring in harbour), this
is often caused by fast currents of fairway water increasing the - 5.0 kn
minimum speed default value.
In this case, the minimum speed value must be adjusted accordingly.
kçíÉ
For installation and service procedures of the gyrosphere and gyro-
sphere container, the following separate Installation, Maintenance and
Service Procedures, delivered with the gyrosphere, apply:
- 04911-0125-001, for gyrosphere type 2, gyrosphere container mod. 7/2
- 04911-0125-002, for gyrosphere type 2, gyrosphere container mod. 10/2
- 05000-0125-001, for gyrosphere type 3, gyrosphere container mod. 10/3
- 05000-0125-002, for gyrosphere type 3, gyrosphere container mod. 10/3
with the NAVIGAT X MK 1 in DP vessel application.
kçíÉ
The Shaft Correction Angle of the gyrosphere is a specific value for each
single item and indicated at the right front corner of the baseplate.
kçíÉ
For recording all parameter settings, use the ‘Setup and Configuration
Tables” in the appendix of this manual.
kçíÉ
For recording installation/ overhaul service work, use the
NAVIGAT X MK 1 Installation/Overhaul Checklist & Record Sheet,
04914-0125-10, as appended in this manual.

k^sfd^q u jh N MRSPQPLc
póëíÉã=aÉëÅêáéíáçå NJN
`Ü~éíÉê=NW fåíêçÇìÅíáçå
NKN póëíÉã=aÉëÅêáéíáçå
fåíÉåÇÉÇ=rëÉ
The NAVIGAT X MK 1 is a digital gyrocompass system for the maritime
navigation of vessels and must be operated only from appropriately
trained and educated personnel familiar with all mandatory safety and
operating procedures.
The NAVIGAT X MK 1 provides North-speed error corrected true heading
data as well as rate of turn (ROT) data for the navigation of maritime
vessels.
The NAVIGAT X MK 1 can operate as a standalone system or as part of a
multi gyrocompass system environment (Heading Management Sys-
tem, HMS).
kçí=fåíÉåÇÉÇ=rëÉ
The NAVIGAT X MK 1 and/or the provided true heading and ROT data of
the NAVIGAT X MK 1 are not allowed to be used for the navigation of
inland water vessels and river boats. Any exception to this restriction
must be regulated by specific certification of an entitled organisation or
administration, for further details see certification information under
”Design and Main Features” on page 1-6 and ”Marine Equipment Direc-
tive EC Declaration of Conformity” on page 1-17.
Although the NAVIGAT X MK 1 is a highly accurate system for providing
true heading and ROT data, operators must not rely on it solely as the
only heading source. The plausibility of the NAVIGAT X MK 1 heading
and ROT data and the speed and position input data (as secondary data)
must always be confirmed against all other available aids to navigation.
Since the NAVIGAT X MK 1 system can additionally be used for display-
ing secondary navigation data (speed and position input data) gener-
ated from other connected devices, the operator must not take
displayed secondary data for granted and is obliged to confirm the
validity of secondary data independently.
When navigating in polar waters (according to E190E IMO Guidelines
definition), the heading information of the gyrocompass may become
unstable/unreliable, due to physical principles, resulting in possible
deviation. For safe steering of the vessel in polar waters, the heading
information of the gyrocompass may therefore not be used and heading
information of a GNSS (Global Navigation Satellite System) compass be
preferred instead.
MRSPQPLc k^sfd^q u jh N
NJO póëíÉã=lîÉêîáÉï=~åÇ=j~áå=`çãéçåÉåíë
NKO póëíÉã=lîÉêîáÉï=~åÇ=j~áå=`çãéçåÉåíë
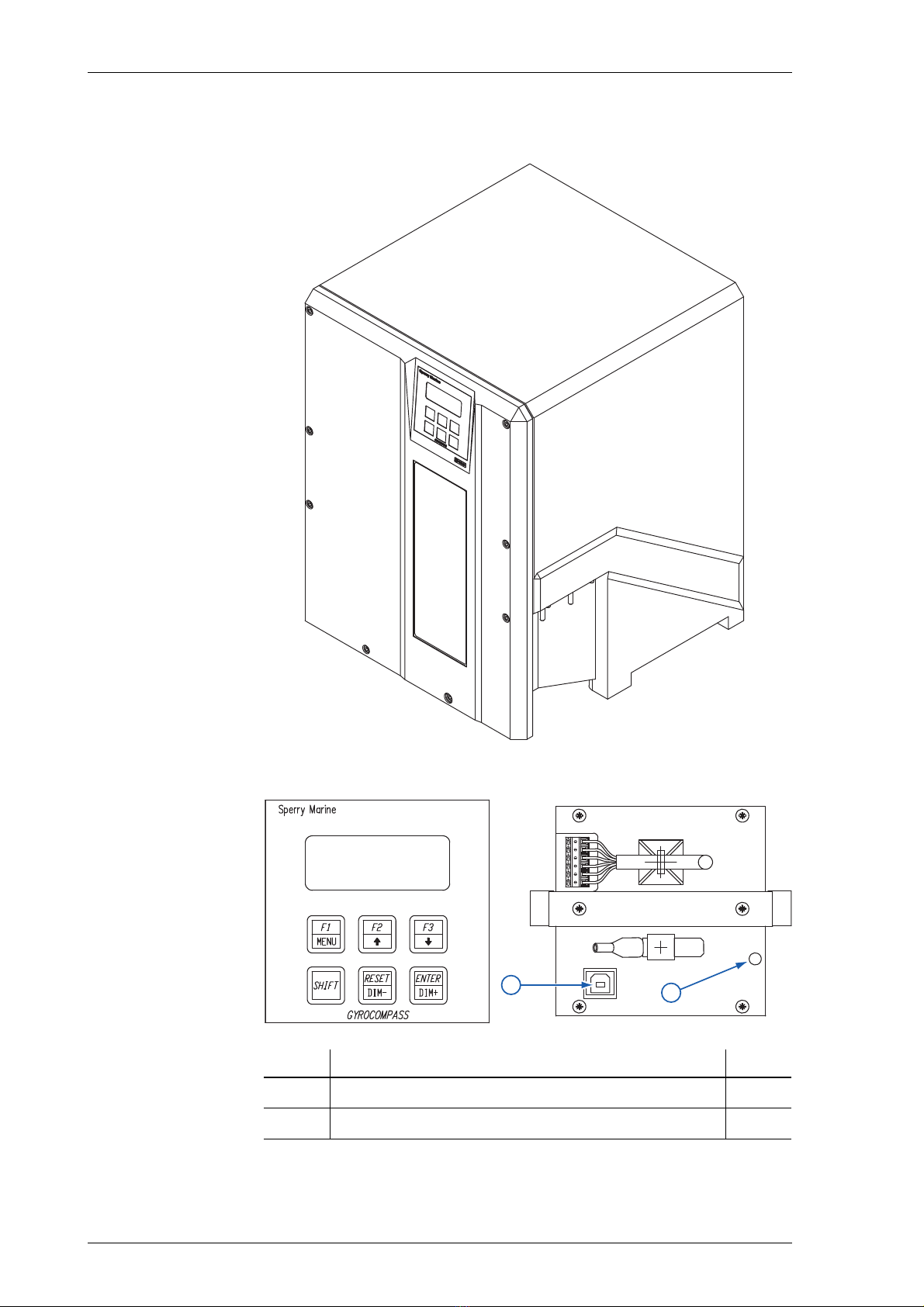
cáÖìêÉ=NJNW
k^sfd^q u jh N=ÜçìëáåÖ
cáÖìêÉ=NJOW
`çåíêçä=~åÇ=Çáëéä~ó=ìåáí
E`arF=Ñêçåí=~åÇ
Ä~Åâ=îáÉï
kçK fíÉã níóK
1USB service interface 1
2Dimmer (CDU display) 1
12
k^sfd^q u jh N MRSPQPLc
póëíÉã=lîÉêîáÉï=~åÇ=j~áå=`çãéçåÉåíë NJP
i~ÄÉä=~åÇ=íóéÉ=ä~ÄÉä
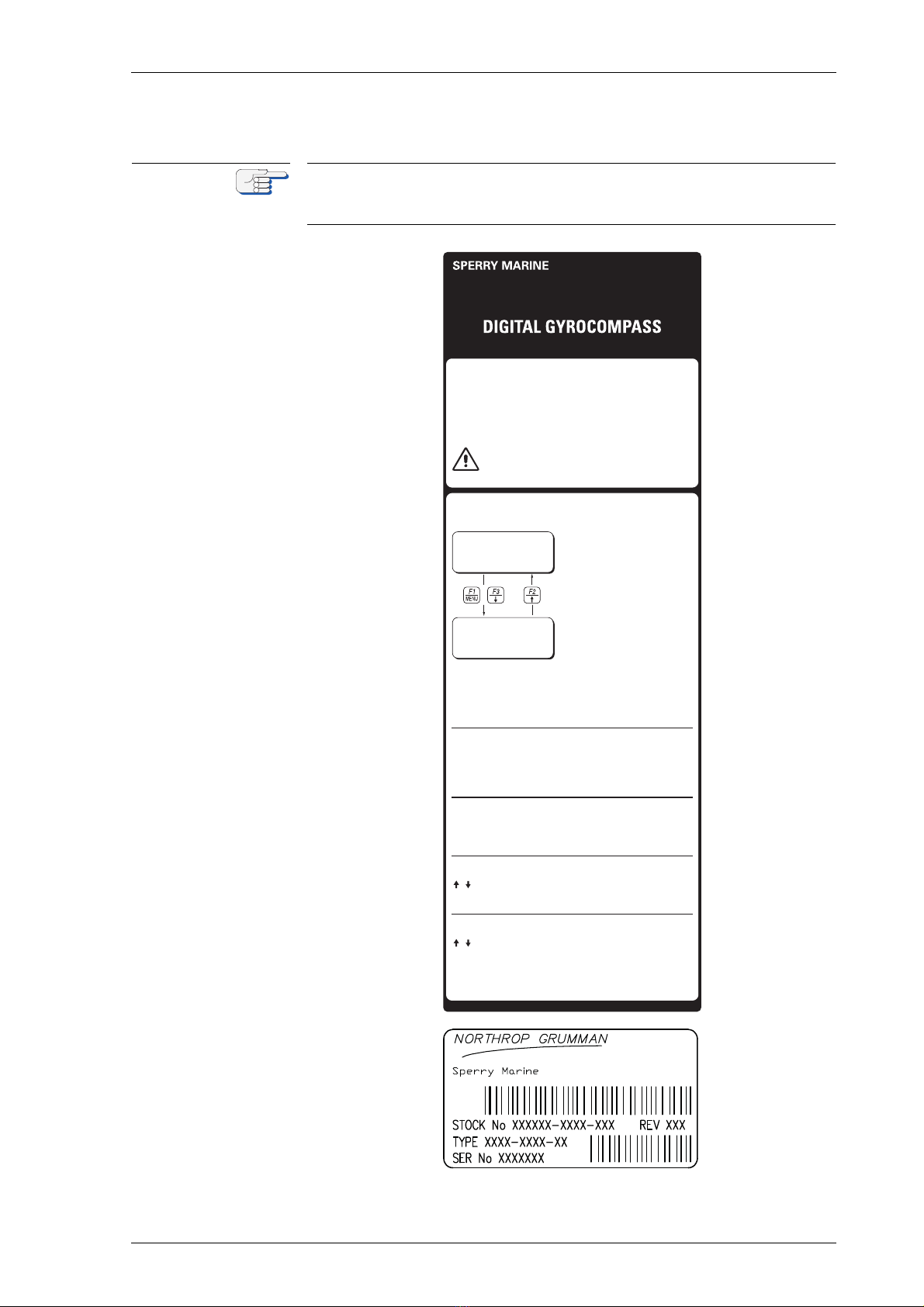
cáÖìêÉ=NJPW
k^sfd^q u jh N
ä~ÄÉä
cáÖìêÉ=NJQW
k^sfd^q u jh N
íóéÉ=ä~ÄÉä
kçíÉ
The label at the front door shows the power-up sequence and a quick
guide to the operation menu for a single NAVIGAT X MK 1 gyrocompass
system only.
SHIFT+F1: Display Data
select display data screen
SHIFT+F2: Manual Settings
set operating parameters
SHIFT+F3: Setup Menu
access user and service
setup menus
Energize the gyrocompass.
1) System performs self-test.
2) Main PCB status message is shown.
3) Heading display screen is shown.
After a cold start, the gyrocompass system
requires a settling time of up to three hours
before reliable heading data is produced.
Main Menu Screen
Operation
Heading Display Screen
SHIFT+F1: Gyro 1
select heading reference Gyro 1
SHIFT+F2: Gyro 2
select heading reference Gyro 2
SHIFT+F3: Magnetic Compass
select heading reference Mag.
F2 GYRO 1 271.2°
>F1 GYRO 1 271.3°
F3 MAGN.C. 270.9°
DIFF G1/M 5° ü
MAIN MENU û
F1 DISPLAY DATA
F2 MANUAL SETTINGS
F3 SETUP MENU
/
Setting Display Brightness:
Dim+: brighter
Dim–: darker
On Alarm:
SHIFT+F1: acknowledge alarm (clears error message
from screen and mutes audible alarm)
SHIFT+RESET: mute audible alarm only
Selecting Parameters:
/ : show next / previous option
SHIFT+ENTER: confirm input and go to next line
/ : increase / decrease input value
Dim+ / Dim–: move cursor forward / back
SHIFT+ENTER: confirm input and go to next line
SHIFT+RESET: clear input (value is set to zero)
Entering Data:
WARNING
Power-up Sequence
NAVIGAT X MK 1
26789-B

This manual suits for next models
4
Table of contents
Other SperryMarine Marine Equipment manuals


Popular Marine Equipment manuals by other brands













Garmin
Garmin GPSMAP 8000 Glass Helm Series instruction manual

poly-planar
poly-planar IXM-10 user guide

Furuno
Furuno Color LCD Sounder FCV-620/585 Operator's manual

Teledyne RD Instruments
Teledyne RD Instruments SENTINEL V SELF-CONTAINED Operation manual

Bosch
Bosch FNM-420V-A-WH installation guide

AMEC
AMEC Camino-108 user manual