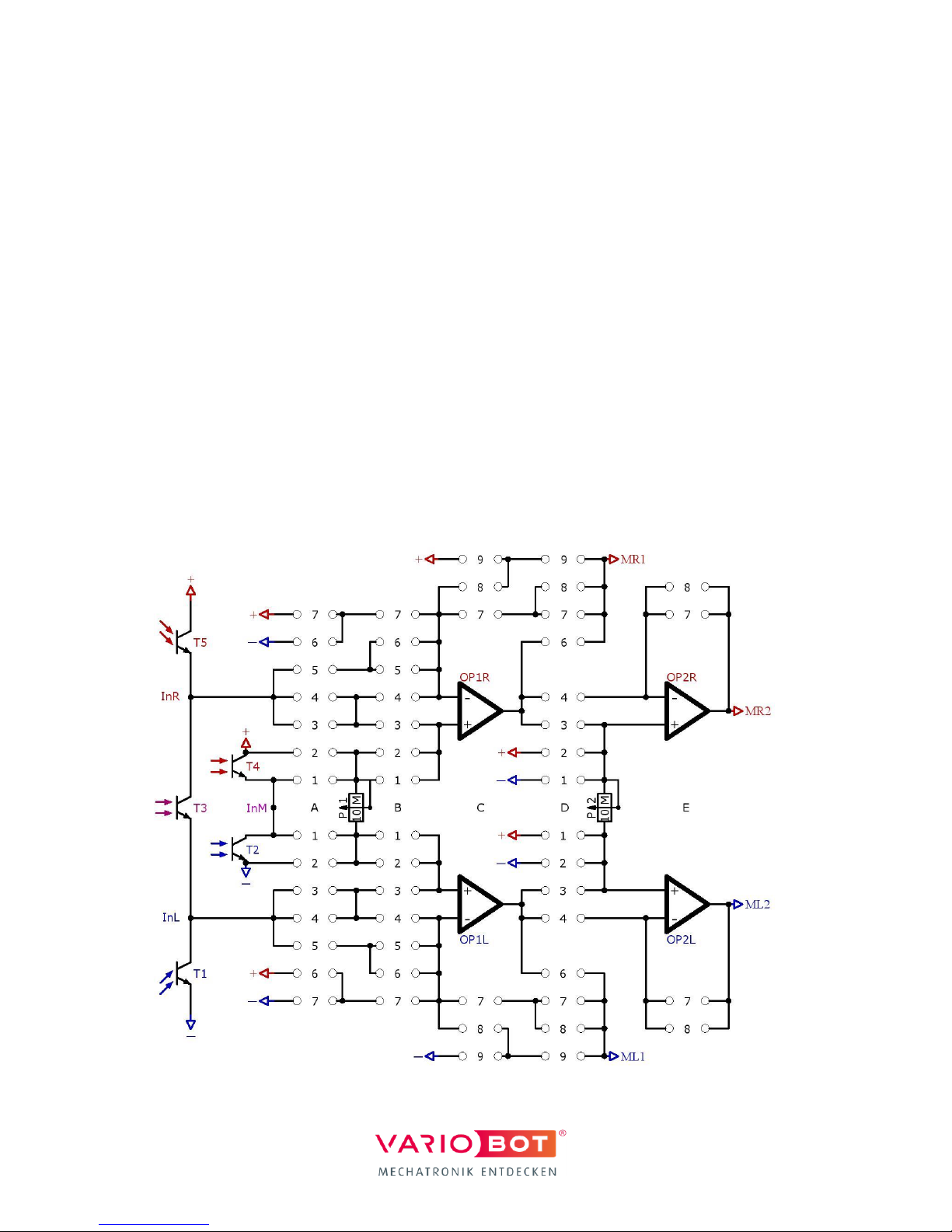
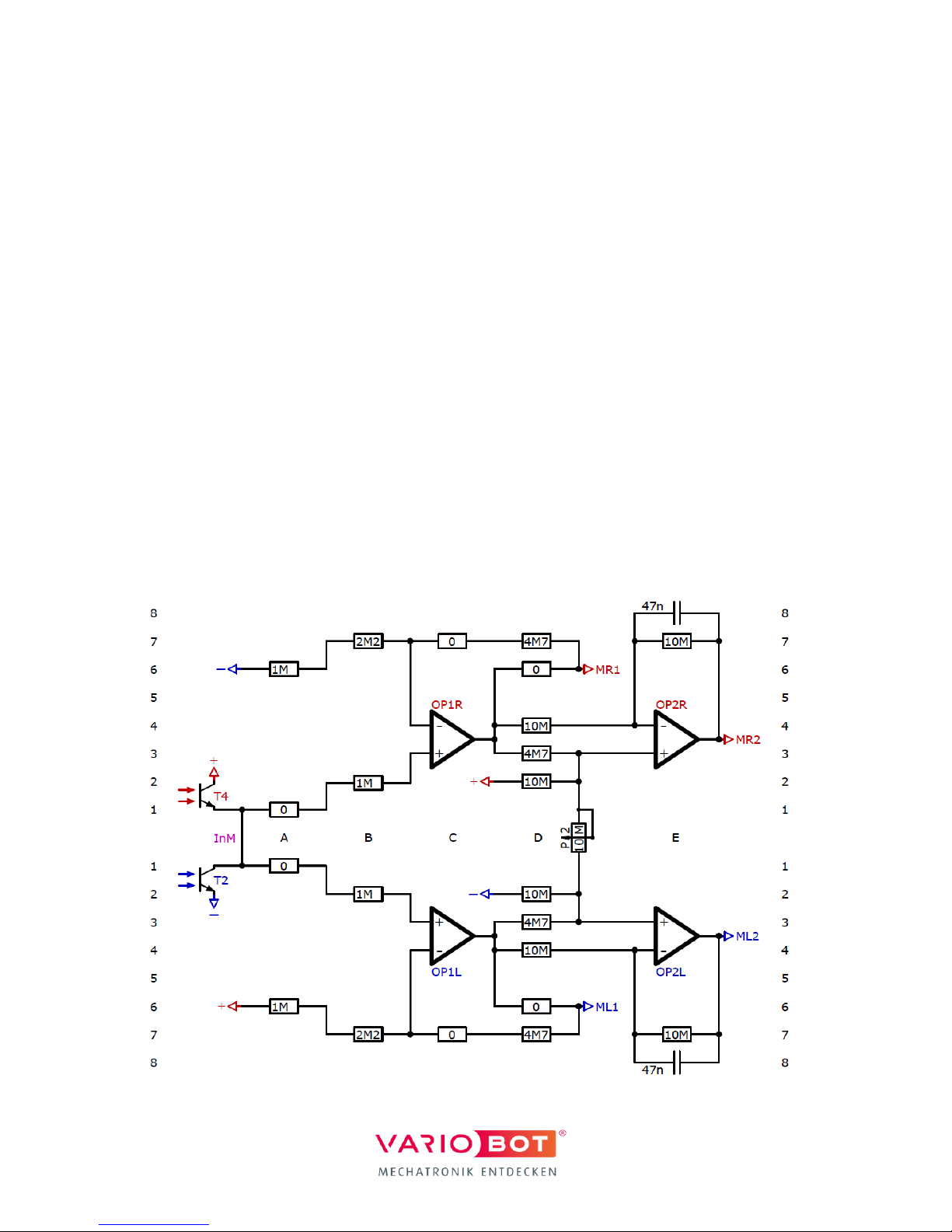
7. The test circuit shown in the illustration al-
lows you to adjust the maximum speed of
the motors via a series resistor if necessary.
For this adjustment, the operational amplifi-
ers OP1R and OP1L are set to maximum gain.
Use the 14-pin sockets to connect the [+] and
[–] inputs of the OPs according to the illustra-
tion, each via a 1 MΩ resistor and a 0 Ω re-
sistance bridge to the supply voltage (square
solder pads with [+] or [–] marking). Then use
the 8-pin sockets to connect the [+] and [–]
inputs of OP2R and OP2L, each via a 10 MΩ
resistor to the supply voltage or the output of
OP1R and OP1L.
8. Initially, connect both motor connections MR1
and ML1 directly via a 0 Ω resistance bridge
with the outputs of OP1R and OP1L according
to the illustration. Now turn on your robot. If
it drives in a slight curve, replace the 0 Ω
bridge before the faster of the two mo-
tors with the 4.7 Ω resistor or
the 10 Ω resistor , ensuring the
robot drives in a line as straight as possible.
The installed resistor then stays in place for
all circuits.
Note:
The right motor rotates forward if the voltage at
the [–] input of OP1R is lower than at the [+]
input. The left motor, however, rotates forward
if the voltage at the [–] input of OP1L is higher
than at the [+] input. OP2R and OP2L invert the
output signals of OP1R and OP1L to let the mo-
tors rotate in both directions with full speed.