Table of Contents
List of references ...........................................................................5
1Introduction.............................................................................. 6
2Getting Started ......................................................................... 7
2.1 Starter set................................................................................................. 7
2.2 Hardware .................................................................................................. 7
2.2.1 Xsens DOT ........................................................................................... 7
2.2.2 LED status ........................................................................................... 8
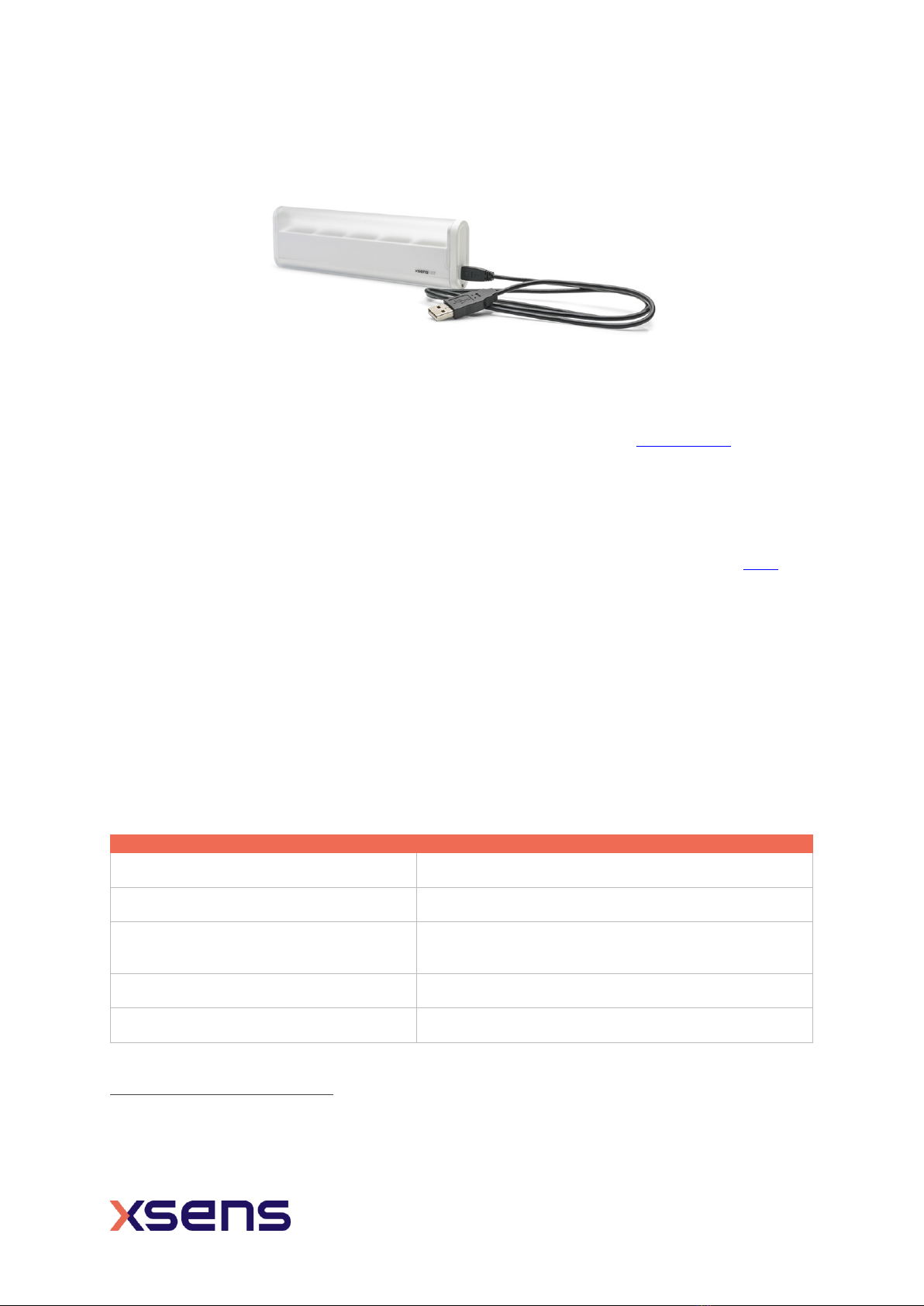
2.2.3 Charger ............................................................................................... 8
2.2.4 Body straps and accessories................................................................... 9
2.3 Software ................................................................................................... 9
2.3.1 Supported platforms ............................................................................. 9
2.3.2 Choose your software...........................................................................10
2.4 Tips for best practice .................................................................................10
2.4.1 Multiple sensors connection...................................................................10
2.4.2 Magnetic distortion...............................................................................10
2.4.3 Cleaning method..................................................................................11
2.4.4 Storage ..............................................................................................12
3Xsens DOT Overview ............................................................... 13
3.1 Strapdown integration................................................................................13
3.2 Sensor fusion algorithm .............................................................................13
3.3 Xsens DOT sensor state transition ...............................................................14
3.3.1 Power ON/OFF.....................................................................................14
3.3.2 Synchronization ...................................................................................14
3.3.3 Measurement ......................................................................................15
3.3.4 Power saving.......................................................................................16
3.4 Magnetic Field Mapper ...............................................................................17
3.5 Firmware Update.......................................................................................17
3.5.1 Firmware update..................................................................................17
3.5.2 Firmware downgrade............................................................................18
3.5.3 Firmware compatibility .........................................................................18
4Output Specifications .............................................................. 19
4.1 Coordinate systems ...................................................................................19
4.1.1 Sensor coordinate system .....................................................................19
4.1.2 Orientation coordinate system ...............................................................19
4.1.3 Heading reset......................................................................................20
4.2 Sensors data outputs .................................................................................21