MOTO
MAN
i ArcWorld II-200 System Manual
TABLE OF CONTENTS
Section Page
LIST OF FIGURES...........................................................................................................................iii
LIST OF TABLES ............................................................................................................................iii
1 INTRODUCTION
1.1 About this Document....................................................................................................1-1
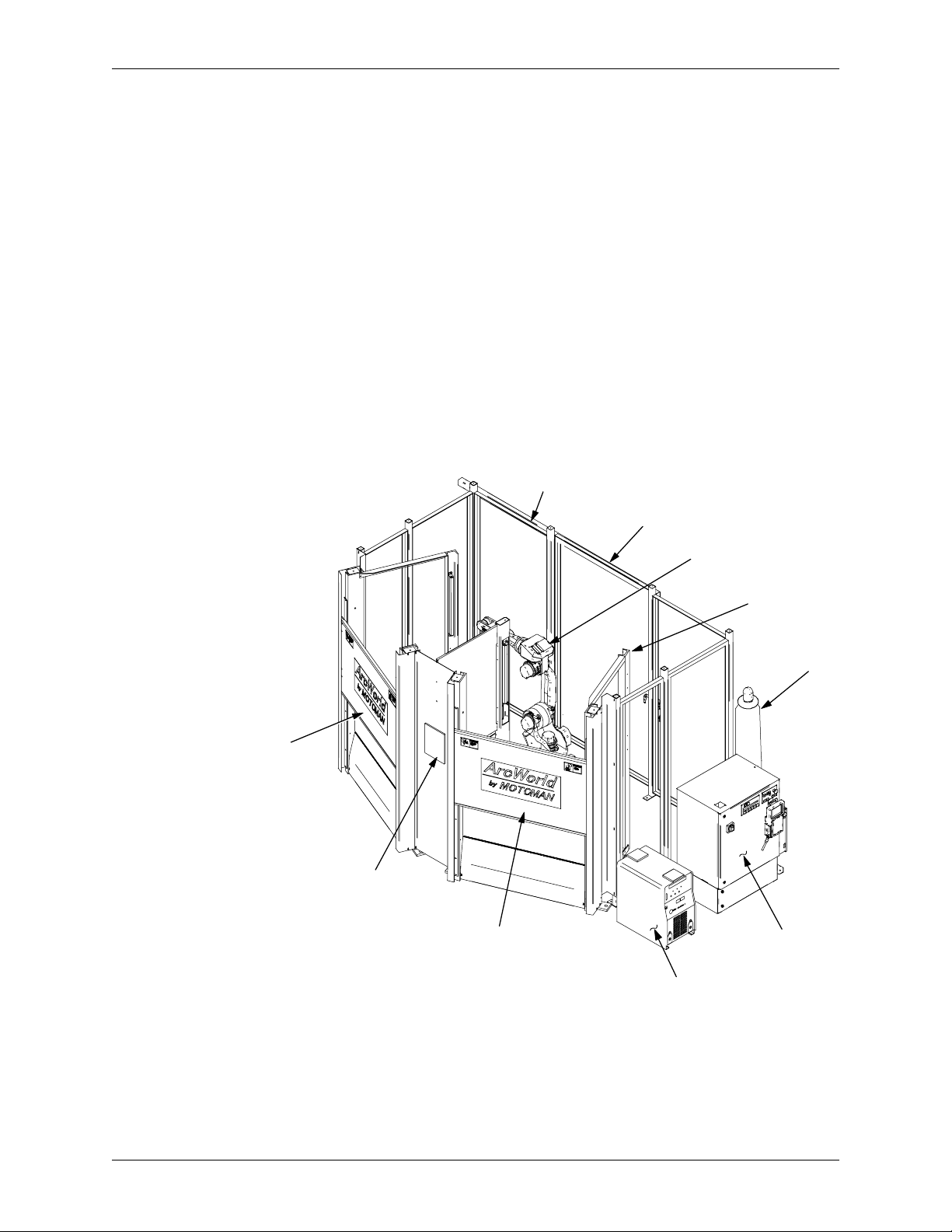
1.2 System Overview ..........................................................................................................1-2
1.2.1 System Layout ................................................................................................1-2
1.2.2 Major Components .........................................................................................1-3
1.2.3 Optional Equipment ........................................................................................1-3
1.3 Reference to Other Documentation................................................................................1-3
1.4 Customer Service Information ......................................................................................1-4
2 SAFETY
2.1 Introduction..................................................................................................................2-1
2.2 Standard Conventions ..................................................................................................2-2
2.3 General Safeguarding Tips............................................................................................2-3
2.4 Mechanical Safety Devices ...........................................................................................2-3
2.5 Installation Safety .........................................................................................................2-4
2.6 Programming Safety.....................................................................................................2-4
2.7 Operation Safety ...........................................................................................................2-5
2.8 Maintenance Safety.......................................................................................................2-6
3 EQUIPMENT DESCRIPTION
3.1 UP-series Robot Description ........................................................................................3-1
3.2 XRC 2001 Controller ....................................................................................................3-1
3.2.1 Playback Panel ...............................................................................................3-2
3.2.2 Programming Pendant ....................................................................................3-3
3.2.3 Brake Release .................................................................................................3-6
3.3 Operator Station............................................................................................................3-6
3.3.1 Cycle Start ......................................................................................................3-6
3.3.2 AUTO/MANUAL ..............................................................................................3-7
3.3.3 Emergency Stop (E-STOP) ..............................................................................3-7
3.4 Barrier Assembly ..........................................................................................................3-7
3.4.1 Stationary Weld Tables ...................................................................................3-7
3.5 Safety Features .............................................................................................................3-8
3.5.1 Arc Screens ....................................................................................................3-8
3.5.2 Fencing ...........................................................................................................3-8
3.5.3 Emergency Stops (E-STOPS) ..........................................................................3-8
3.5.4 ENABLE Switch ...............................................................................................3-9
3.5.5 Interlocked Cell Door ......................................................................................3-9
3.5.6 Light Curtains .................................................................................................3-9
3.5.7 Brake Release .................................................................................................3-9