PRO-160 V2.3/2 04/20 Page 10 www.4qd.co.uk
14. Throttle settings
14.1 “Input mode”. Selects the input to be used. Pot will use the signal applied to pin E
of the control port. RC will use the RDO port. Volt will also use the signal on pin E
of the control port but the pot fault checks will be disabled.
14.2 “Joystick”. Selects either single ended or joystick [center-off / wig-wag] mode.
14.3 “Deadband”. Sets the amount of input required before the output starts [joystick
mode only].
14.4 “Pot learn”. See Section 16. [also used for Volt mode].
14.5 “RC learn.” See Section 16.
14.6 “Lockout”. Prevents the motor starting if the Pro-160 is switched on with the
throttle not at zero. This setting defines the throttle position above which this
occurs. Lockout is disabled in Volt mode.
15. Advanced settings
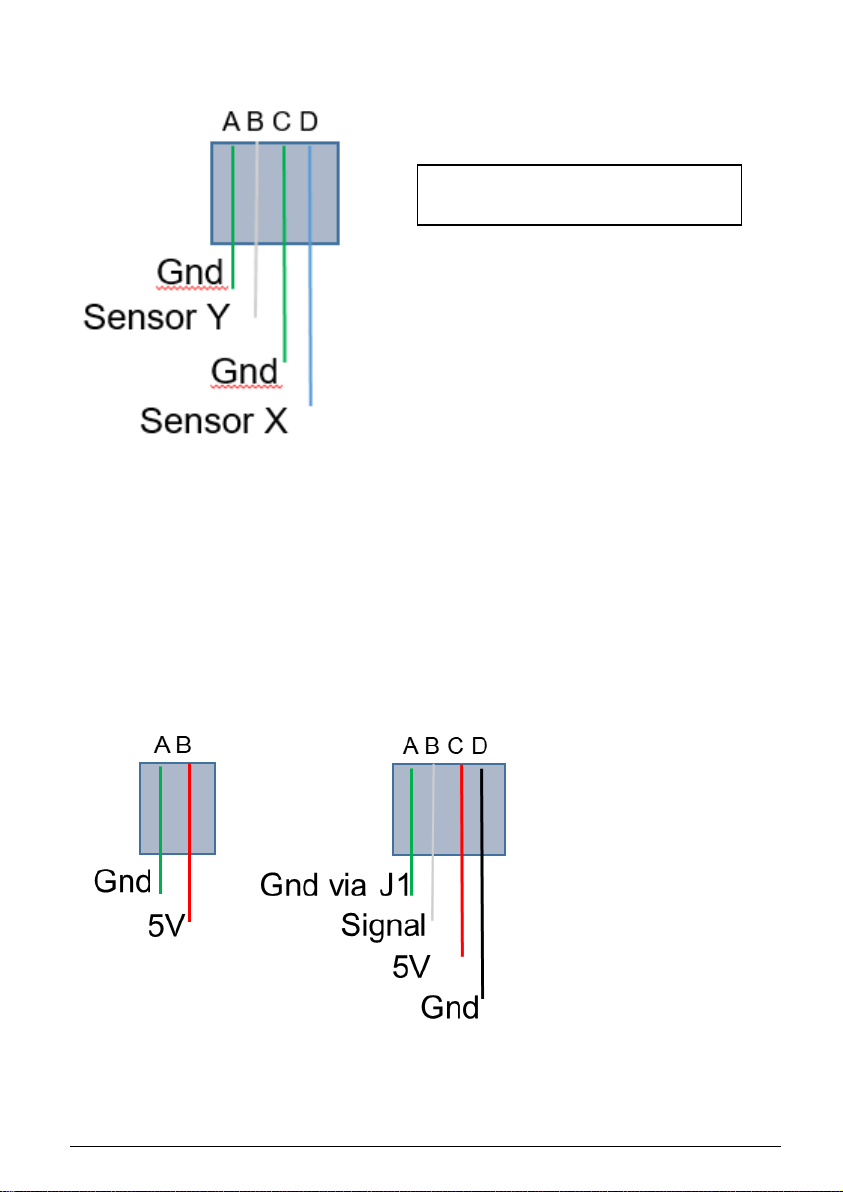
15.1 “Speed sensor”. Switches on the speed sensor input. “Learn mode” here
displays the actual rpm being measured. “MAX rpm” sets the limit beyond
which the controller will reduce the power. Full details of the speed sensor
function are available on our website.
15.2 “Temperature”. Switches on the external temperature sensors X and / or Y. Each
sensor can have its own warning level set. Once switched on the Pro-160 will
display each sensor temperature in turn. Note: the controller sensor [C] is
calibrated differently to the X and Y sensors, they may not give exactly the same
readings at start up.
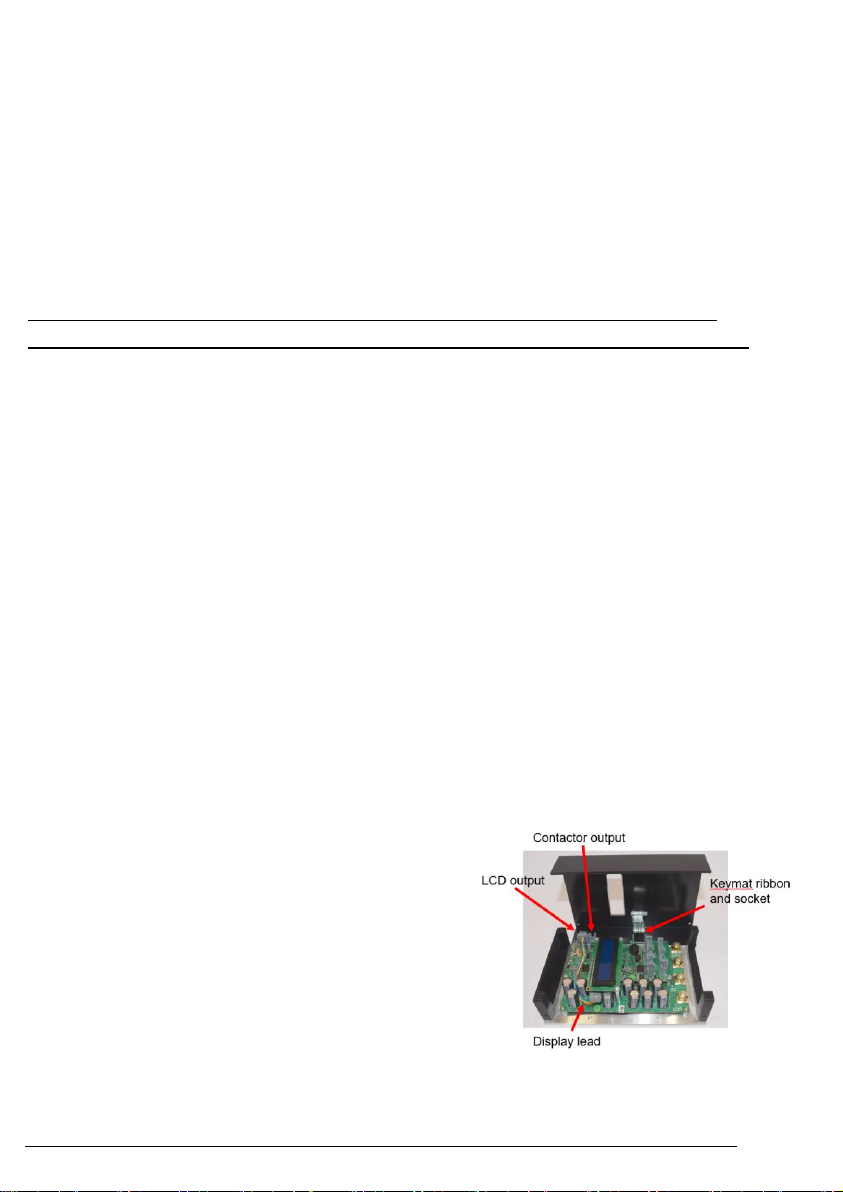
15.3 “Contactor”. Changes the controller to contactor mode. See the knowledge base
on our website for more details.
16. Using the “learn” function
The “learn”function allow you to match zero speed, full forward, and full reverse
from the Pro-160 to specific input signals from your pot, radio control receiver, or
other input source.
16.1 Set either “Pot learn” or “RC learn”active [only one per profile].
16.2 Select “Learn zero”and press SEL, the Pro-160 will show a number related to the
value detected from the pot [or other input].
16.3 Set the pot, transmitter stick, or other input to the position you want to have as
zero, and press SEL to capture the associated number.
16.4 Repeat steps 15.2 –15.3 for “Learn max forward” and “Learn max reverse”
16.5 Use BACK to return to the main menu and then save changes.