Bewis Sensing Technology LLC
www.bwsensing.com TEL:0510-85737158
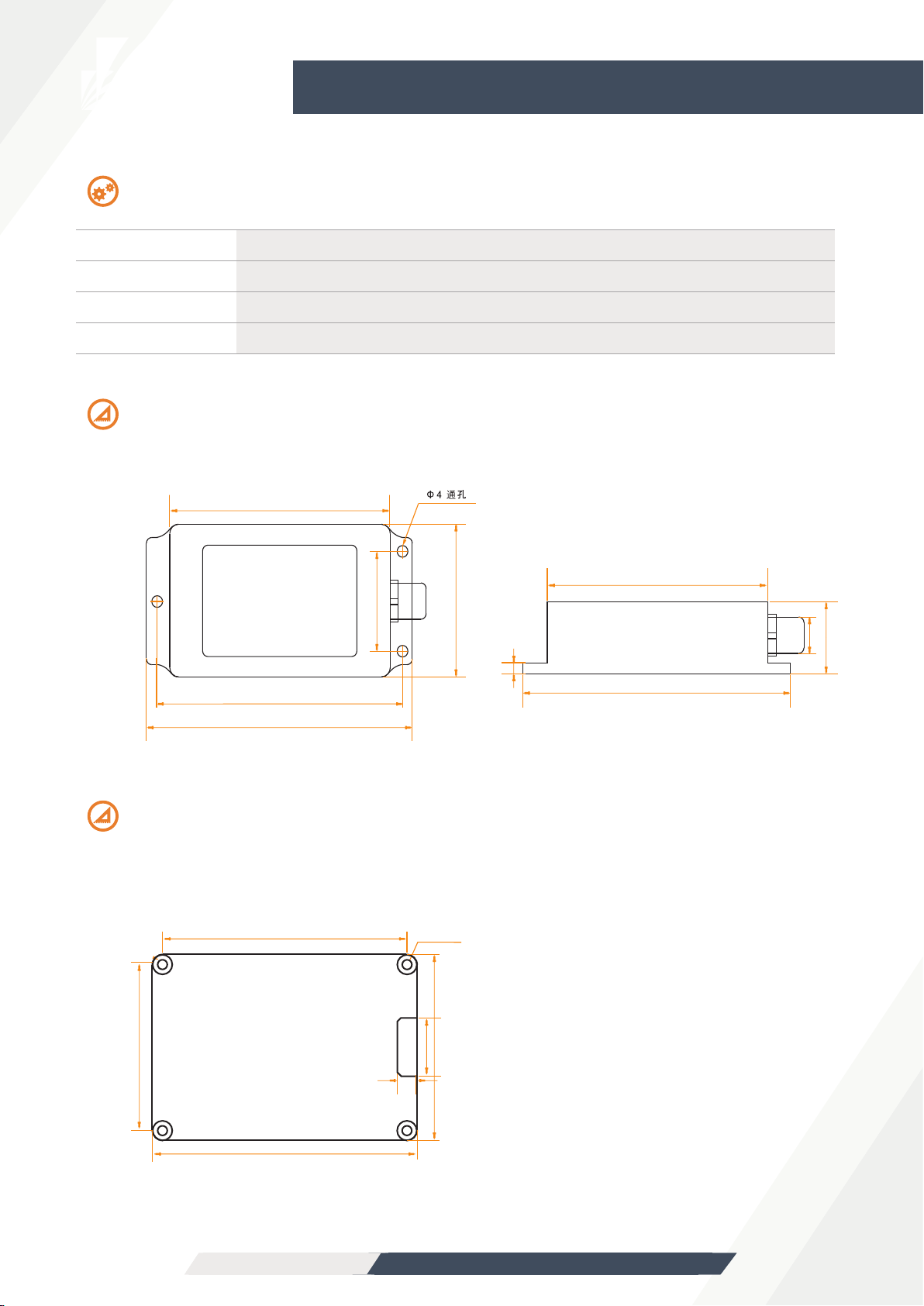
Measurement installation
The azimuth reference system has been calibrated at the factory. In places where the influence of the
magnetic field environment is small, it is not necessary to perform environmental calibration when using
it, and it can be used directly. During actual use, it is recommended to perform calibration.
Azimuth calibration steps:
Method 1 - Plane calibration:
1. Connect the product to the system and place the product in a horizontal state;
2. Open the CAN debugging tool and send 605 40 11 10 00 00 00 00 00;
3. Rotate the product in the horizontal plane (with the pitch and roll angles within +-5°) around the
z-axis (the z-axis is vertical) and rotate 2-3 turns,the rotation process is as slow as possible and
rotates at a constant speed. The time of one rotation is controlled between 10 seconds and 15
seconds.
4. Rotate the compass around the x-axis or y-axis. The rotation can be performed at a slow speed
and near-uniform rotation. Rotate 2-3 turns around each axis for a period of about 15 seconds.
5. Complete the calibration and send 605 40 12 10 00 00 00 00 00 to save the calibration.
Method 2 - Multi-faceted calibration:
1. Fix the electronic compass in the use environment, and try not to carry magnetic items such as
keys and mobile phones during calibration;
2. Place the compass in a horizontal state (within ±5 degrees);
3. Send the following calibration command in hexadecimal format: 605 40 08 10 00 00 00 00 00;
4. The product is placed horizontally, face up (pitch and roll are within 0±5 degrees), myopia
rotates at a uniform speed for one week, and rotation takes more than ten seconds.
5. The product is placed horizontally with the mounting surface facing up (within 0±5 degrees of pitch
and 180±5 degrees of rolling). The myopia rotates at a uniform speed for one week, and it takes about
10 seconds to rotate one week.
6. The product is placed in a vertical state with the smooth side of the casing facing down (within 0±5
degrees of pitch and 90±5 degrees of rolling). The myopia rotates at a uniform speed for one week,
and it takes about 10 seconds to rotate one week.
7. The product is placed in a vertical position, and the other smooth side of the casing faces downward
(within 0±5 degrees of pitch and within -90±5 degrees of rolling). The approximately rotates at a
uniform speed for one week, and it takes about 10 seconds to rotate one week;
Where 4.5.6.7 steps can be exchanged;
8. After the four faces have been rotated, send the hexadecimal command 605 40 09 10 00 00 00 00 00
to save the calibration and return to 585 40 09 10 00 XX 00 00 00. Where XX represents the calibration
error coefficient, the smaller the value, the better, less than 10 is ideal, and FF indicates calibration
failure;
9. Calibration is complete.
Clear calibration data command: 605 40 13 10 00 00 00 00 00
BW-AH525
High precision CAN bus AHRS