PRELIMINARY
Document type: Title: Revision date: Revision:
User's Manual (MUT) Mod. V1729 4 Channel 12 Bit Sampling ADC 22/06/2005 3
NPO: Filename: Number of pages: Page:
00109/04:V1729.MUTx/03 V1729_REV3.DOC 38 3
TABLE OF CONTENTS
1. GENERAL DESCRIPTION.......................................................................................................................5
1.1 OVERVIEW .............................................................................................................................................5
1.2 SAMPLING FREQUENCY ..........................................................................................................................6
1.3 INPUT SIGNALS, DYNAMIC RANGE..........................................................................................................6
2. OPERATING MODES...............................................................................................................................7
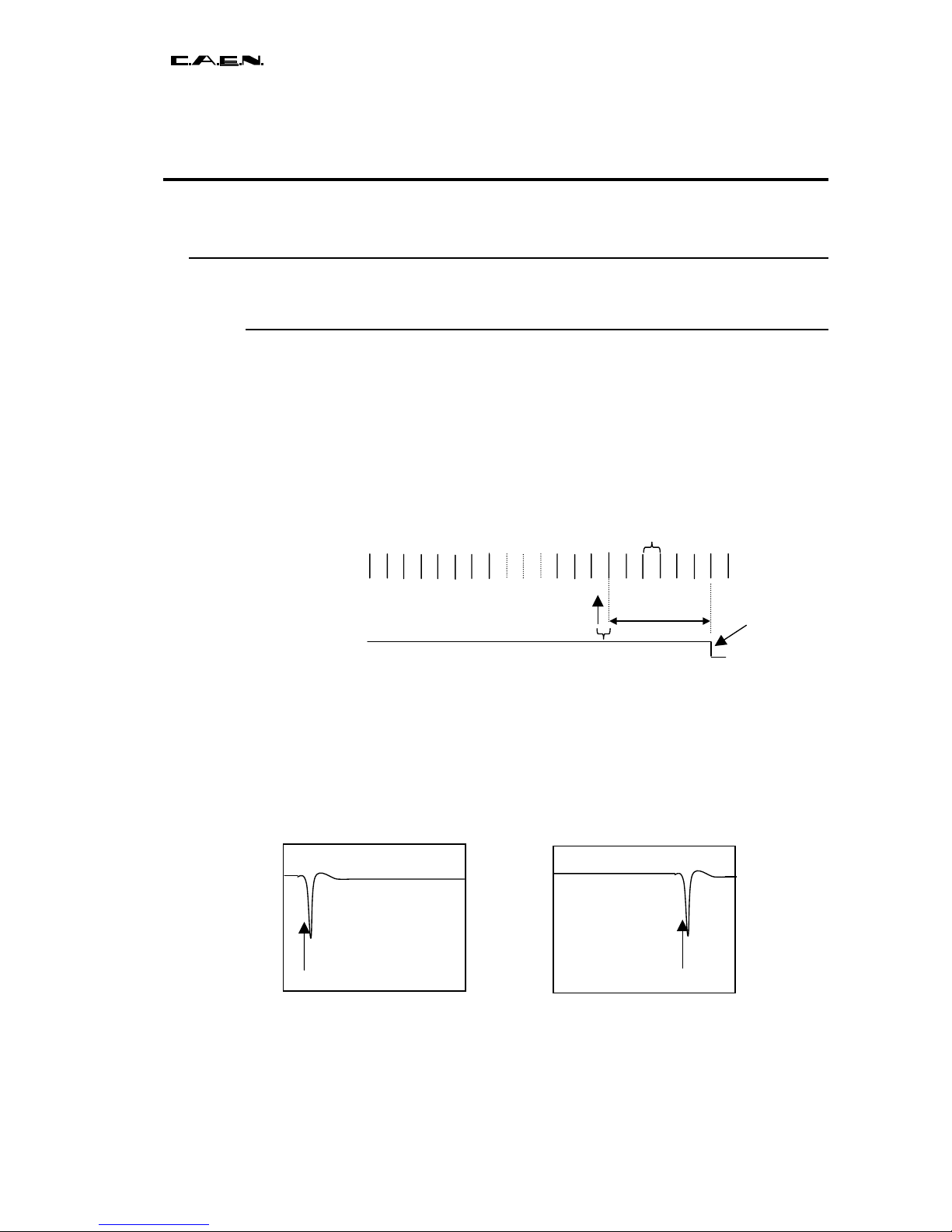
2.1 DEFINITION OF THE ACQUISITION WINDOW. TRIGGER MODES.................................................................7
2.1.1 Principle, PRETRIG, POSTTRIG..................................................................................................7
2.1.2 Trigger sources..............................................................................................................................8
2.1.3 Trigger edge ..................................................................................................................................8
2.1.4 TRIGOUT signal ...........................................................................................................................8
2.2 VALIDATION OF THE TRIGGER BY A SECOND SUBSEQUENT SIGNAL.........................................................9
2.3 DEAD TIME AT RESTARTING OF THE ACQUISITION; PRETRIG.................................................................10
2.4 STANDARD ACQUISITION SEQUENCE.....................................................................................................10
2.5 CORRECTION OF DATA..........................................................................................................................11
2.5.1 Correction of the pedestals..........................................................................................................12
2.5.2 Temporal corrections ..................................................................................................................13
3. SYNCHRONIZATIONS AND CALIBRATIONS.................................................................................16
3.1 SYNCHRONIZATION BETWEEN THE CHANNELS......................................................................................16
3.1.1 Channels from the same board....................................................................................................16
3.1.2 Channels situated on different boards........................................................................................16
3.2 SYNC_OUT AND BUSY SIGNALS ......................................................................................................16
3.3 CALIBRATIONS .....................................................................................................................................17
3.3.1 Calibration of the interpolator....................................................................................................17
3.3.2 Calibration of the pedestals.........................................................................................................20
3.3.3 Temporal calibration between different channels.......................................................................20
4. TECHNICAL SPECIFICATIONS..........................................................................................................21
4.1 PACKAGING..........................................................................................................................................21
4.2 SAMPLING FREQUENCY ........................................................................................................................21
4.3 INPUT SIGNALS, DYNAMIC RANGE........................................................................................................21
4.4 FRONT PANEL.......................................................................................................................................22
4.5 MECHANICAL AND ELECTRICAL STANDARDS........................................................................................23
4.5.1 Mechanical standard...................................................................................................................23
4.5.2 Electrical interfaces.....................................................................................................................23
4.5.3 Summary of front panel signals...................................................................................................24
4.5.4 Supplies .......................................................................................................................................25
4.5.5 Pinout of the non-standard connectors .......................................................................................25
4.5.6 Straps and resistor network sockets ............................................................................................26
4.5.7 Implementation of differential inputs ..........................................................................................26
4.5.8 Using a shifted input range .........................................................................................................27
4.6 INTERFACES .........................................................................................................................................28
4.6.1 VME interface..............................................................................................................................28
4.6.2 GPIB Interface.............................................................................................................................28
4.7 READING OF THE DATA IN THE RAM, MAPPING....................................................................................29
4.8 LIST OF THE SUB-ADDRESSES................................................................................................................31
4.9 SYNOPSIS OF THE BOARD......................................................................................................................35
5. SPECIFICATIONS AND PERFORMANCES.......................................................................................37
6. BIBLIOGRAPHY .....................................................................................................................................38