Continental Hydraulics Installation Manual
Page 10 of 15 CEM-SD-A CHI 1013477 May 2012
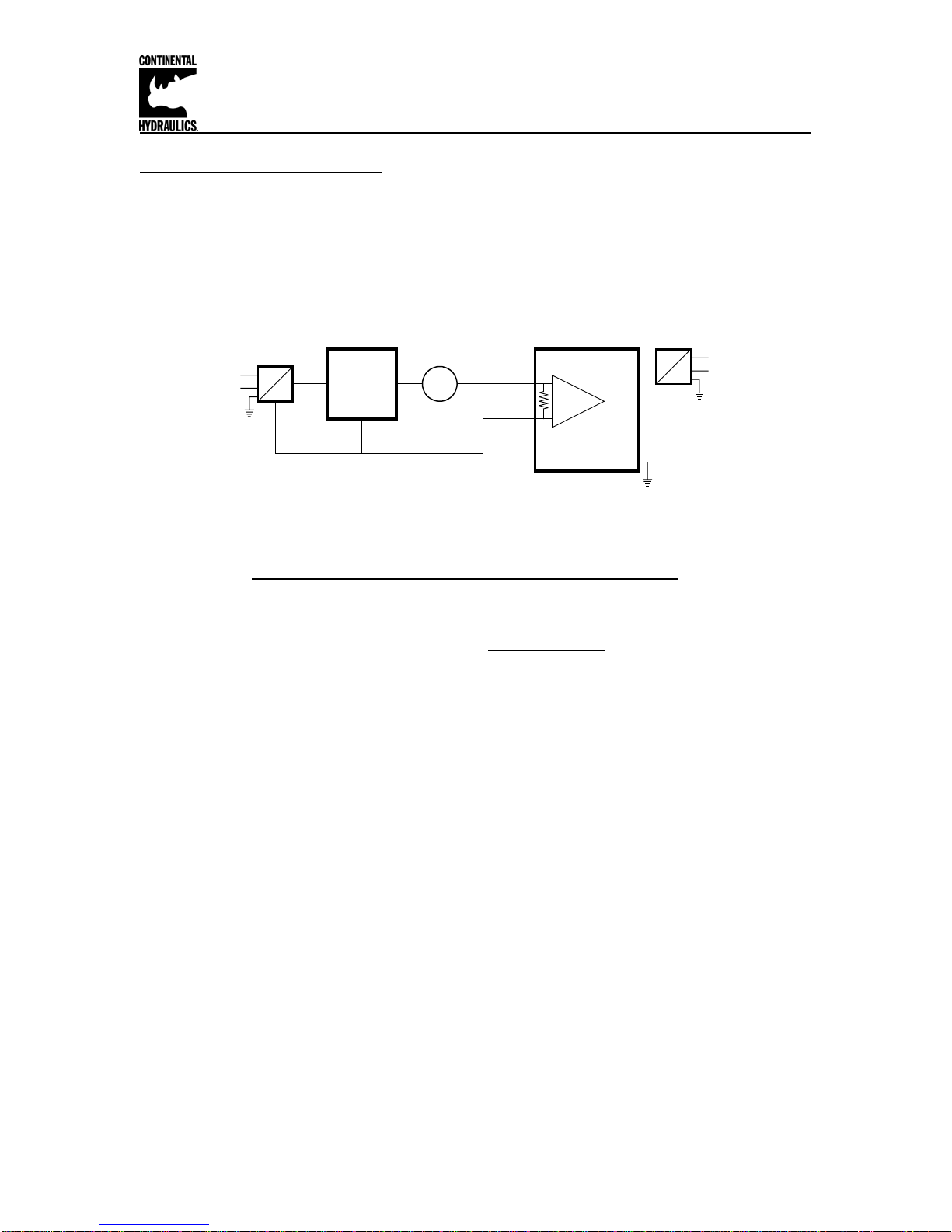
Scaling of analog input:
This module has a native analog voltage input range of 0 to +10v for command and feedback.
These inputs can be scaled and offset with software to allow a wide variety of input voltages. A
few examples are:
0 to +10v, 0 to +5v, +1 to +5v, +0.5 to +4.5v
The AIN:W parameter adjusts command port, and AIN:X parameter adjusts the feedback port.
Each can be independently set for either voltage or current command, and each can be
independently scaled.
Example: AIN:W V will set the command input to voltage. Default range = 0 to +10v
Example: AIN:W C will set the command input to current. Default range = 4 to 20mA
Example: AIN:X V will set the feedback input to voltage. Default range = 0 to +10v
Example: AIN:X C will set the feedback input to current. Default range = 4 to 20mA
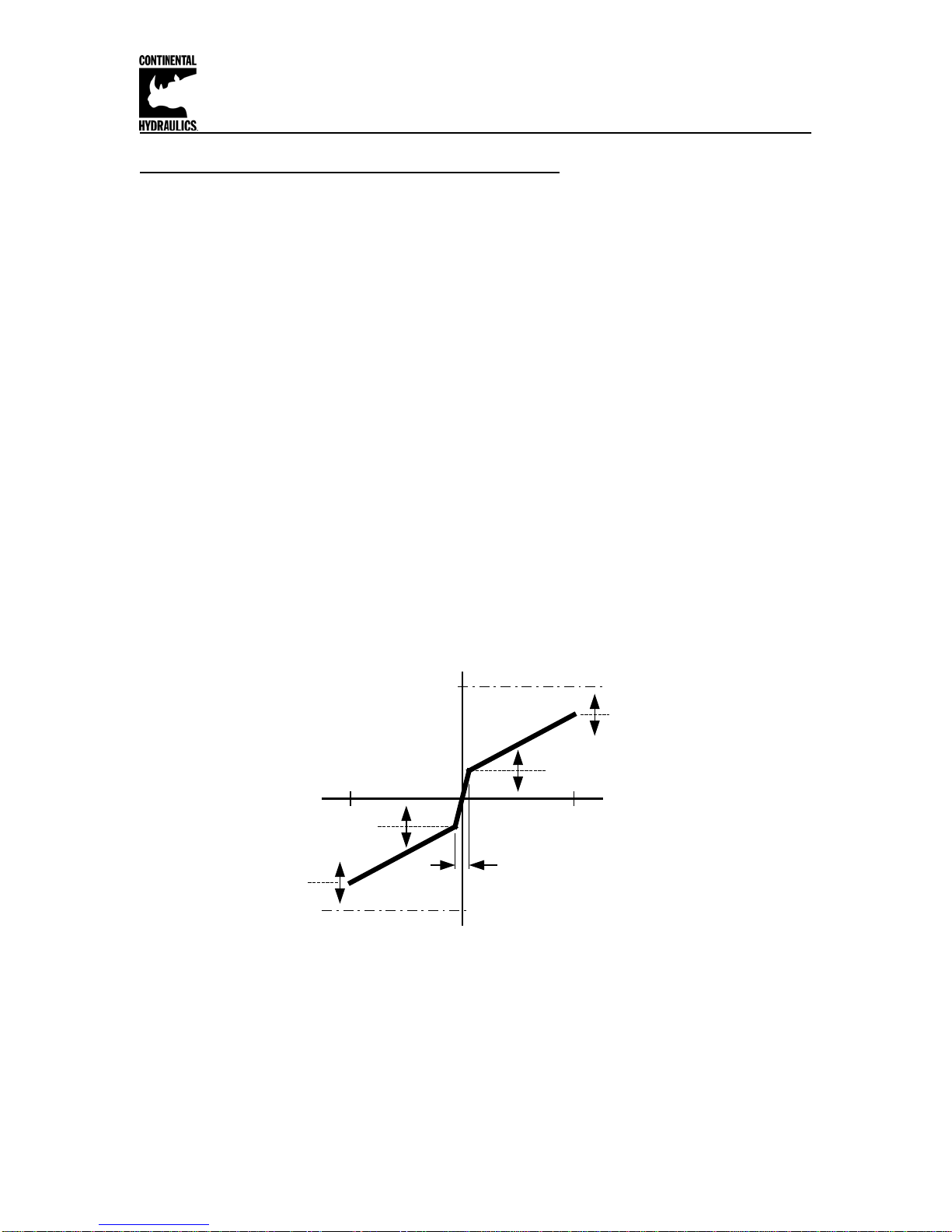
Analog voltages or currents are scaled with the following linear equation:
Output = A/B * (Input – C)
“Output” of this scaling equation must always be equal to the module native input range, 0 to
+10v. “Input” can be any voltage within this 10v range.
The ratio of A/B allows for a decimal scaling factor. These two numbers are chosen to provide a
“gain” to the input signal. A and B must be whole numbers. Range is -10000 to 10000.
(Default; A = 1000, B = 1000)
C is an offset, measured as a percentage of range. C has units of 0.01%, and has the range of
–10000 to 10000. (Default; C = 0)
Scaling of voltage inputs:
Example: Typical AIN parameter settings for popular command and feedback voltages:
Command A B C description
0 to +10v 1000 1000 0 100% scale, 0% offset
0 to +10v 1 1 0 100% scale, 0% offset
0 to +10v 10 10 0 100% scale, 0% offset
0 to +5v 10 5 0 200% scale, 0% offset
+1 to +9v 10 8 1000 125% scale, 10% offset
+0.5 to +4.5v 10 4 500 250% scale, 5% offset
0 to 8v 10 8 0 125% scale, 0% offset
Scaling of current inputs:
Example: Typical AIN parameter settings for popular command and feedback currents:
Command A B C description
4 to 20mA 20 16 2000 125% scale, 20% offset
4 to 20mA 1250 1000 2000 125% scale, 20% offset
4 to 20mA 5 4 2000 125% scale, 20% offset
0 to 20mA 20 20 0 100% scale, 0% offset