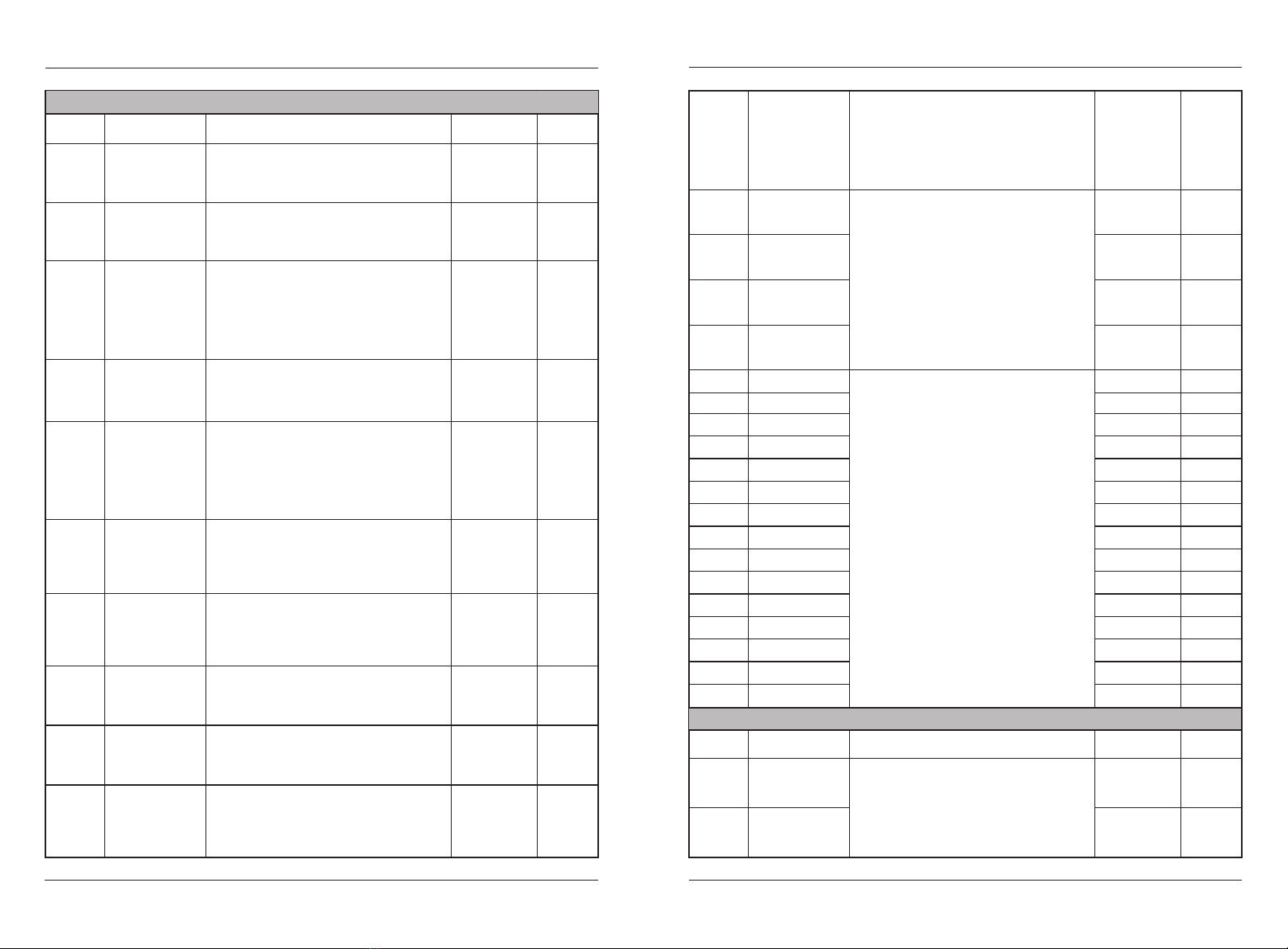
Err04
Overcurrent
at constant
speed
Err05
1: The output circuit is grounded
or short circuited.
2: Motor auto-tuning is not
performed.
3: The input voltage is too low.
4: A sudden load is added during
operation.
5: The AC drive model is of too
small power class.
1: The input voltage is too high.
2: An external force drives the
motor during acceleration.
3: The acceleration time is too
short.
4: The braking unit and braking
resistor are not installed.
1: Eliminate external faults.
2: Perform the motor autotuning.
3: Adjust the voltage to the normal range.
4: Remove the added load.
5: Select an AC drive of higher power
class.
1: Adjust the voltage to normal range.
2: Remove the external force or install a
braking resistor.
3: Increase the acceleration time.
4: Install the braking unit and braking
resistor.
Err10
Err11
Err06
Err07
Err08
Err09
Overvoltage
during
acceleration
AC drive
overload
Motor
overload
Overvoltage
during
deceleration
Overvoltage
at constant
speed
Control
power supply
fault
Undervoltage
1: The load is too heavy or
locked rotor occurs on the motor.
2: The AC drive model is of too
small power class.
1: P9-23 is set improperly.
2: The load is too heavy or
locked rotor occurs on the motor.
3: The AC drive model is of too
small power class.
1: The input voltage is too high.
2: An external force drives the
motor during deceleration.
3: The deceleration time is too
short.
4: The braking unit and braking
resistor are not installed.
1: The input voltage is too high.
2: An external force drives the
motor during running.
1: The input voltage is not
within the allowable range.
1: Instantaneous power failure
occurs on the input power supply.
2: The AC drive's input voltage
is not within the allowable range.
3: The DC-Bus voltage is abnormal.
4: The rectifier bridge and
buffer resistor are faulty.
5: The drive board is faulty.
6: The main control board is
faulty.
1: Reduce the load and check the motor and
mechanical condition.
2: Select an AC drive of higher power
class.
1: Set it correctly.
2: Reduce the load and check the motor and
the mechanical condition.
3: Select an AC drive of higher power
class.
1: Adjust the voltage to normal range.
2: Remove the external force or install a
braking resistor.
3: Increase the deceleration time.
4: Install the braking unit and braking
resistor.
1: Adjust the voltage to the normal range.
2: Remove the external force or install
the braking resistor.
1: Adjust the input voltage to the
allowable range.
1: Reset the fault.
2: Adjust the voltage to the normal range.
3: Contact technical support.
4: Contact technical support.
5: Contact technical support.
6: Contact technical support.
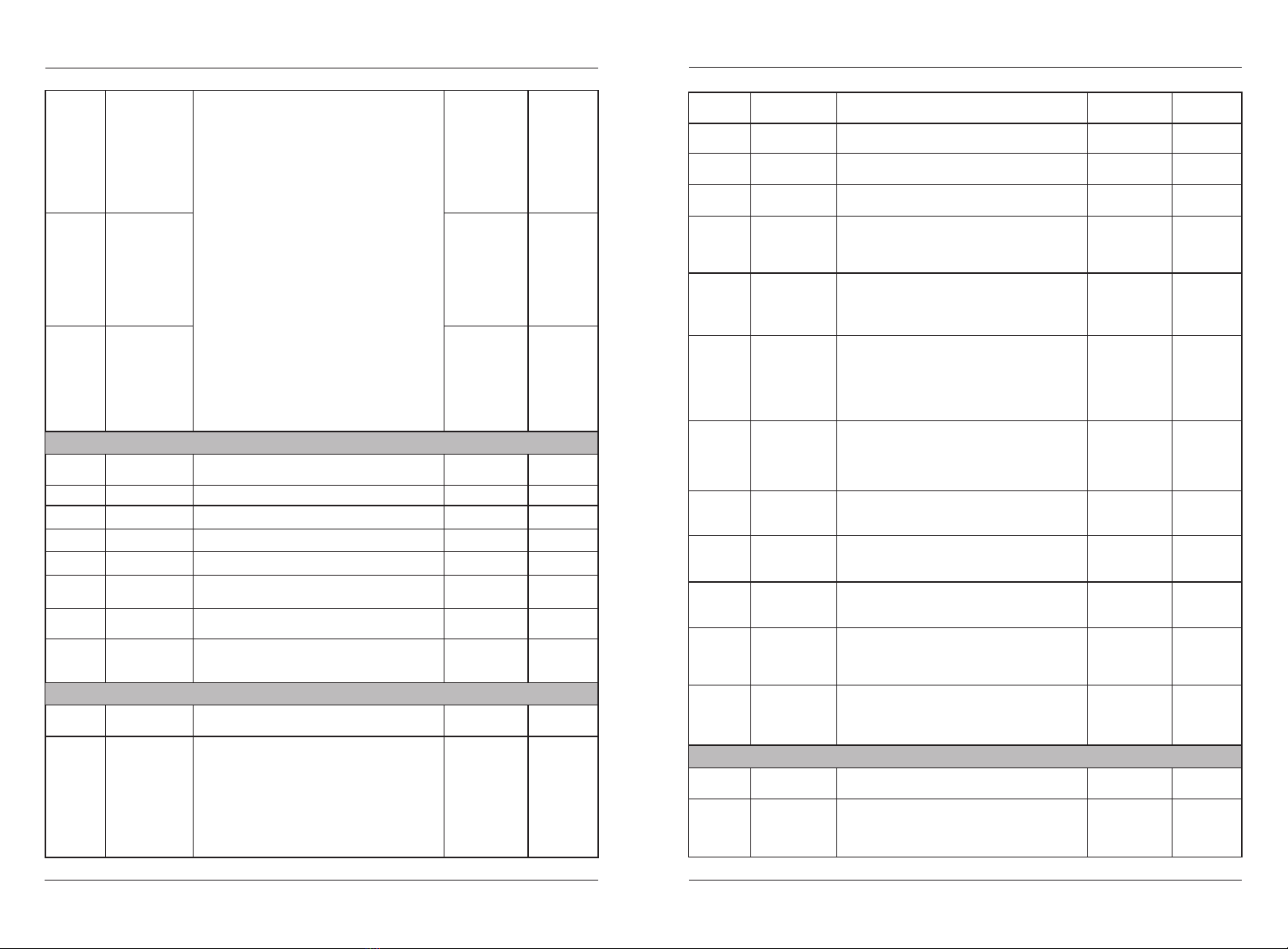
Err12 Power input
phase loss
1: The three-phase power input is
abnormal.
2: The drive board is faulty.
3: The lightening board is faulty.
4: The main control board is
faulty.
1: Eliminate external faults.
2: Seek technical support.
3: Seek technical support.
4: Seek technical support.
Err13 Power output
phase loss
1: The cable connecting the AC
drive and the motor is faulty.
2: The AC drive's three-phase
outputs are unbalanced when the
motor is running.
3: The drive board is faulty.
4: The module is faulty.
1: Eliminate external faults.
2: Check whether the motor three-phase
winding is normal.
3: Seek technical support.
4: Seek technical support.
Err14 Module
overheat
1: The ambient temperature is too
high.
2: The air filter is blocked.
3: The fan is damaged.
4: The thermally sensitive
resistor of the module is damaged.
5: The inverter module is damaged.
1: Lower the ambient temperature.
2: Clean the air filter.
3: Replace the damaged fan.
4: Replace the damaged thermally
sensitive resistor.
5: Replace the inverter module.
Err15
Err16
Err17
Err18
Err19
Err20
Err21
Err22
Err24
External
equipment
fault
Communication
fault
Contactor
faul
Current
detection
fault
Motor
auto-tuning
fault
Encoder
fault
EEPROM
readwrite
fault
AC drive
hardware
fault
Running
time reached
1: The motor parameters are not
set according to the nameplate.
2: The motor auto-tuning times out.
1: The encoder type is incorrect.
2: The cable connection of the
encoder is incorrect.
3: The encoder is damaged.
4: The PG card is faulty.
1: External fault signal is input
via S.
1: The host computer is in
abnormal state.
2: The communication cable is
faulty.
3: The communication parameters in
group PB are set improperly.
1: The drive board and power
supply are faulty.
2: The contactor is faulty.
1: The HALL device is faulty.
2: The drive board is faulty.
1: The EEPROM chip is damaged.
1: Overvoltage exists.
2: Overcurrent exists.
1: Accumulative running time
reaches setting.
1:Reset the operation.
1: Check the cabling of host computer.
2: Check the communication cabling.
3: Set the communication parameters
properly.
1: Replace the faulty drive board or
power supply board.
2: Replace the faulty contactor.
1: Replace the faulty HALL device.
2: Replace the faulty drive board.
1: Set the motor parameters according
to the nameplate properly.
2: Check the cable connecting the AC
drive and the motor.
1: Set the encoder type correctly
based on the actual situation.
2: Eliminate external faults.
3: Replace the damaged encoder.
4: Replace the faulty PG card.
1: Replace the main control panel.
1: Handle based on over-voltage.
2: Handle based on over-current.
1: Clear the record through the
parameter initialization function.
Err23
Short
circuit
to ground
1: The motor is short circuited
to the ground. 1: Replace the cable or motor.
Err25 User-defined
fault 1 1: The user-defined fault 1 signal
is input via DI. 1: Reset the operation.
Err26 User-defined
fault 2
Fa u lt s a nd s o lu t io n s
EC 6 70
Fa u lt s a nd s o lu t io n s
EC 6 70
- 7 - - 8 -