Contents
1. Before you start ......................................................................................................................................................... 3
1.1. recaution and Safety ..........................................................................................................................................................................3
1.2. Updates.................................................................................................................................................................................................3
1.3. Important Notes.....................................................................................................................................................................................3
2. A reviations ............................................................................................................................................................ 4
3. Quick guide ................................................................................................................................................................ 6
3.1. Connecting the camera module ...........................................................................................................................................................6
3.2. Camera settings ...................................................................................................................................................................................6
4. TOFcam-660 time of flight camera ........................................................................................................................... 7
4.1. System overview ..................................................................................................................................................................................7
4.2. Scope of delivery ..................................................................................................................................................................................7
4.3. Ordering information ............................................................................................................................................................................7
4.4. Technical data ......................................................................................................................................................................................9
4.5. Mechanical data .................................................................................................................................................................................10
4.5.1. Mechanical features ...........................................................................................................................................................................10
4.5.2. Mechanical dimensions ......................................................................................................................................................................11
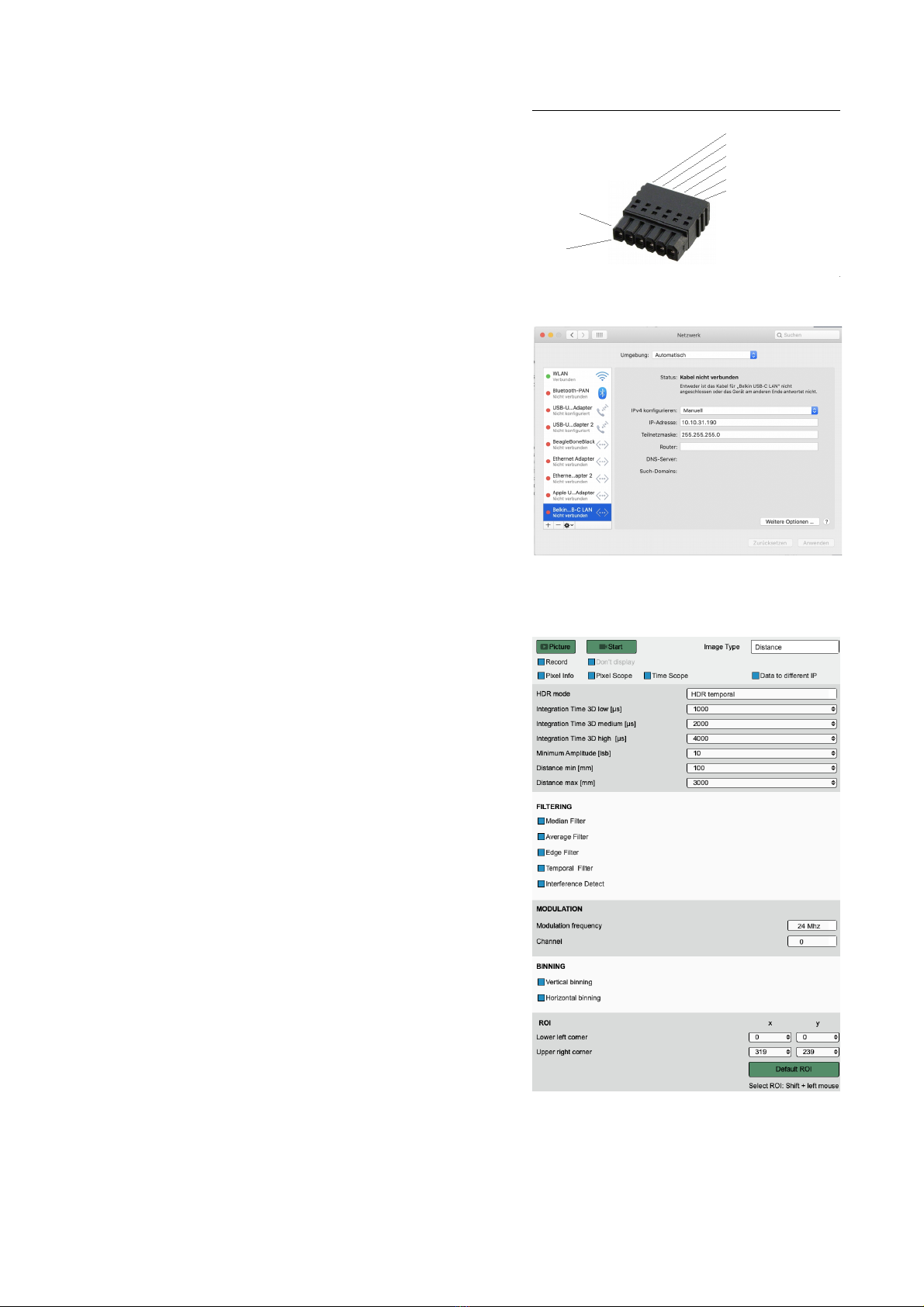
4.6. Camera connectors.............................................................................................................................................................................11
4.6.1. LAN connector ...................................................................................................................................................................................11
4.6.2. ower and G IO connector ...............................................................................................................................................................11
4.6.3. I reset button ....................................................................................................................................................................................12
4.7. Start up ...............................................................................................................................................................................................12
4.8. Firmware upgrade ..............................................................................................................................................................................13
5. GUI ............................................................................................................................................................................ 14
5.1. GUI main window ...............................................................................................................................................................................14
5.1.1. View menu .........................................................................................................................................................................................14
5.1.2. lay menu ..........................................................................................................................................................................................17
5.1.3. Live image window .............................................................................................................................................................................17
5.1.4. oint cloud .........................................................................................................................................................................................18
5.1.5. Decided information windows ............................................................................................................................................................19
5.2. Network settings .................................................................................................................................................................................20
5.3. Configurations menu ..........................................................................................................................................................................20
6. Operating the device with a ROS ...........................................................................................................................21
6.1. ROS camera driver.............................................................................................................................................................................21
6.1.1. What is ROS?.....................................................................................................................................................................................21
6.1.2. Building the ROS driver .....................................................................................................................................................................21
6.1.3. Running the ROS driver with launch file ............................................................................................................................................21
6.2. ROS A I..............................................................................................................................................................................................22
6.2.1. Start of the node..................................................................................................................................................................................22
6.2.2. ublished topics..................................................................................................................................................................................22
6.2.3. Dynamically reconfigurable parameters.............................................................................................................................................23
7. Communication interface ....................................................................................................................................... 24
7.1. Description .........................................................................................................................................................................................24
7.2. Command Connection (TC ) .............................................................................................................................................................24
8. Communication ....................................................................................................................................................... 25
8.1. Commands .........................................................................................................................................................................................25
8.2. Responses .........................................................................................................................................................................................27
8.3. Factory commands..............................................................................................................................................................................28
9. Measurement Data Connection (UDP).................................................................................................................... 30
9.1. acketizing (transport layer)...............................................................................................................................................................30
9.2. ayload (application layer)..................................................................................................................................................................31
9.3. ayload Header..................................................................................................................................................................................31
9.4. Data types and format of measurement data.....................................................................................................................................32
9.5. Measurement data..............................................................................................................................................................................32
10. Maintenance and disposal....................................................................................................................................... 33
10.1. Maintenance........................................................................................................................................................................................33
10.2. Disposal...............................................................................................................................................................................................33
11. Addendum................................................................................................................................................................. 34
11.1. Related documents.............................................................................................................................................................................34
11.2. Links....................................................................................................................................................................................................34
11.3. Licenses..............................................................................................................................................................................................34
12. IMPORTANT NOTICE............................................................................................................................................... 35
© 2021 ES ROS hotonics Corporation
Characteristics subject to change without notice
2 / 35 Installation_and_Operation_Manual_TOFcam660_V.02
www.espros.com