True View 410 Hardware User Guide
2 True View 410 Hardware User Guide 8/3/2020
CONTENTS
About GeoCue Group, Inc. ......................................................................................................................4
About True View® 410 ............................................................................................................................ 5
A True View Cycle ................................................................................................................................... 5
True View 410 Hardware Integration Kit .................................................................................................6
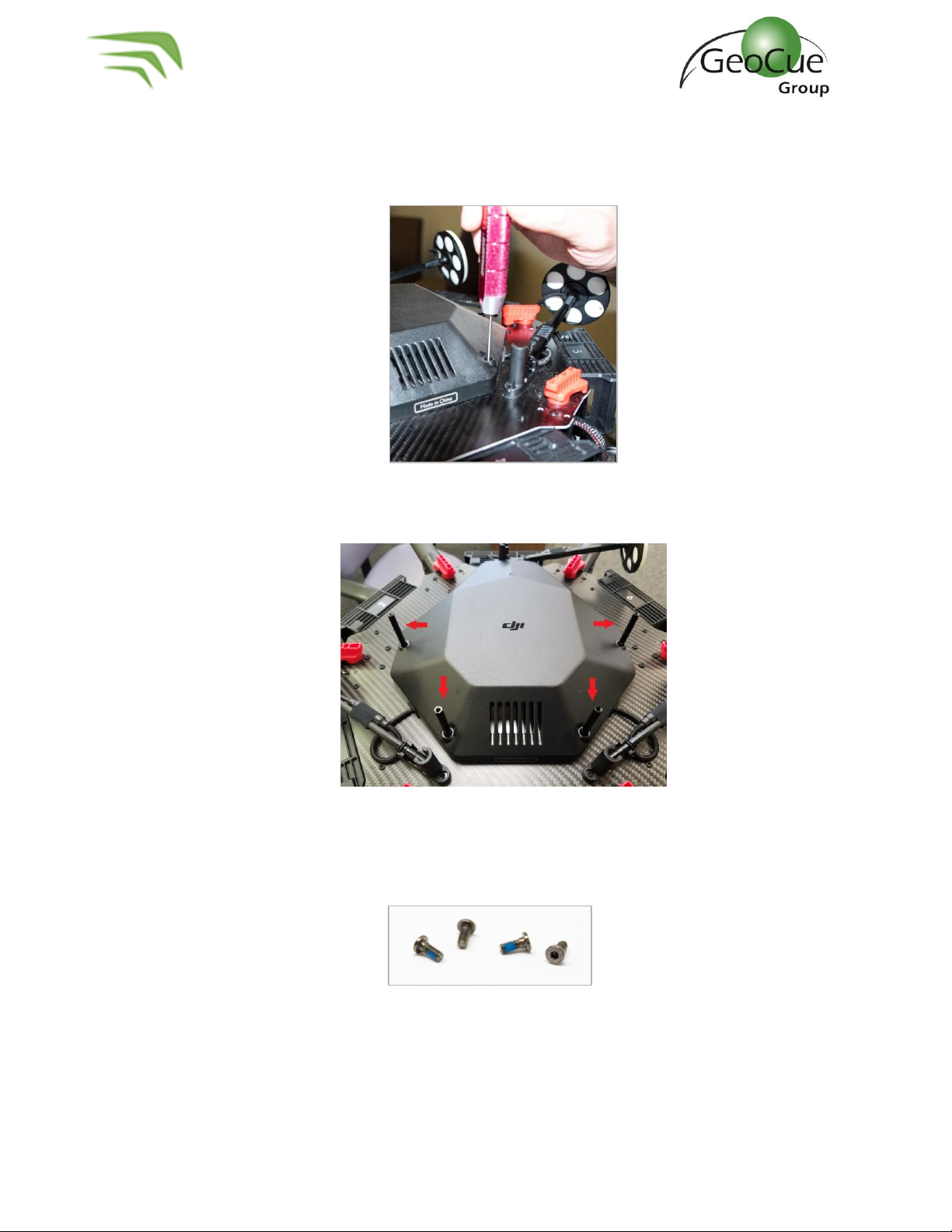
Installing the Top Plate and Controller Box .........................................................................................6
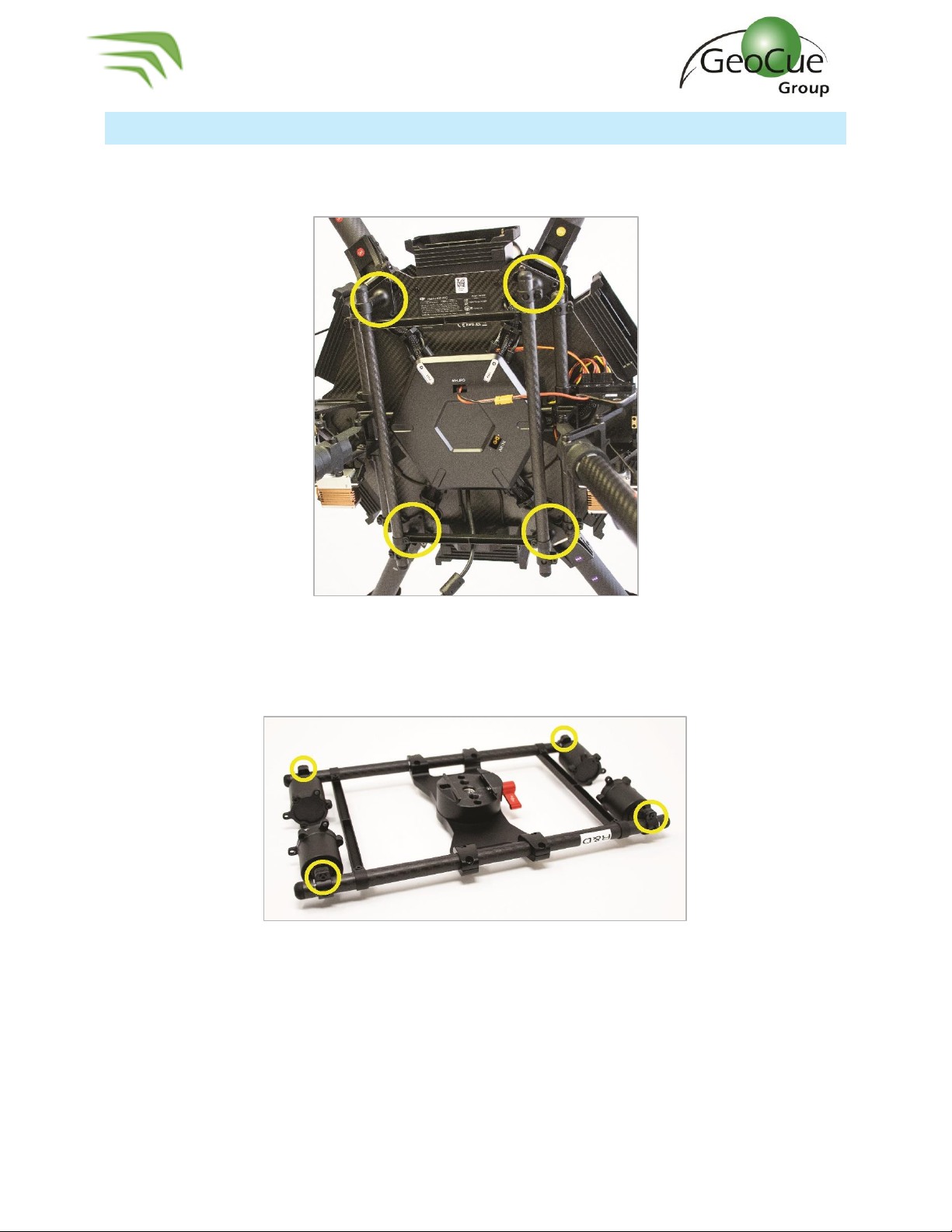
Installing the Ronin Mount ................................................................................................................ 10
True View 410 Installation..................................................................................................................... 12
True View 410 Battery........................................................................................................................... 16
True View 410 Universal Mass Storage (UMS)........................................................................................17
System Configuration File (SCF).........................................................................................................17
Core Configuration File ......................................................................................................................17
CCFSection8 –Camera.................................................................................................................. 18
CCFSection11 –Configuration Laser.............................................................................................. 18
CCFSection15 –Battery................................................................................................................. 19
CCFSection16 - Cycle .................................................................................................................... 19
CCFSection17 –Storage Auto Delete ............................................................................................ 20
True View 410 Field Operations ............................................................................................................ 22
1. Base Station ..............................................................................................................................22
2. Pre-Flight .................................................................................................................................. 23
3. Controller Box LEDs .................................................................................................................. 25
4. Heading Alignment Maneuver................................................................................................... 27
5. After Landing ............................................................................................................................28
True View EVO......................................................................................................................................29
Logging in To APX15............................................................................................................................. 30
Configure True View Wi-fi ................................................................................................................. 30
Log in to APX-15 ............................................................................................................................... 31
Download T04 Files....................................................................................................................... 32
Measuring GNSS Lever Arm Offsets ..................................................................................................... 33
Z Offset............................................................................................................................................. 34
X Offset............................................................................................................................................. 35