220010/1.2/EN Franka Emika GmbH © 3
TABLE OF CONTENTS
1ABOUT FRANKA EMIKA........................................................................................................................................... 4
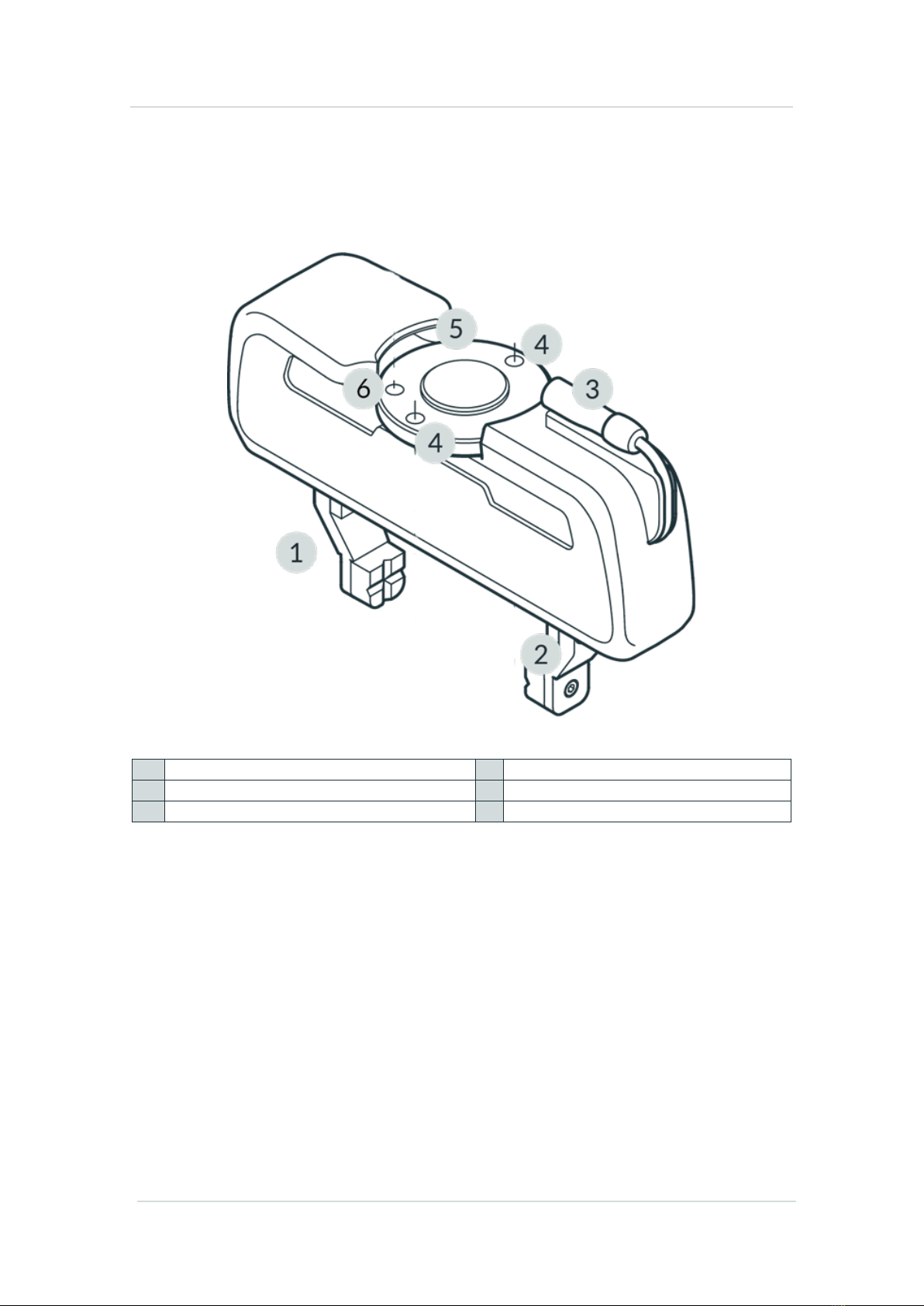
2ABOUT FRANKA HAND ........................................................................................................................................... 5
3RIGHTS OF USE AND PROPERTY RIGHTS .......................................................................................................... 6
3.1 General.................................................................................................................................................................... 6
3.2 Identification..........................................................................................................................................................6
4
SAFETY.......................................................................................................................................................................... 7
4.1
S
afety Instructions and General Indications ................................................................................................... 7
4.2 Notice of Liability.................................................................................................................................................. 8
4.3 Intended Use ......................................................................................................................................................... 8
4.4 Misuse..................................................................................................................................................................... 8
4.5 General Possible Dangers and Safety Measures when Working with Robots......................................... 9
5TECHNICAL SPECIFICATIONS ..............................................................................................................................10
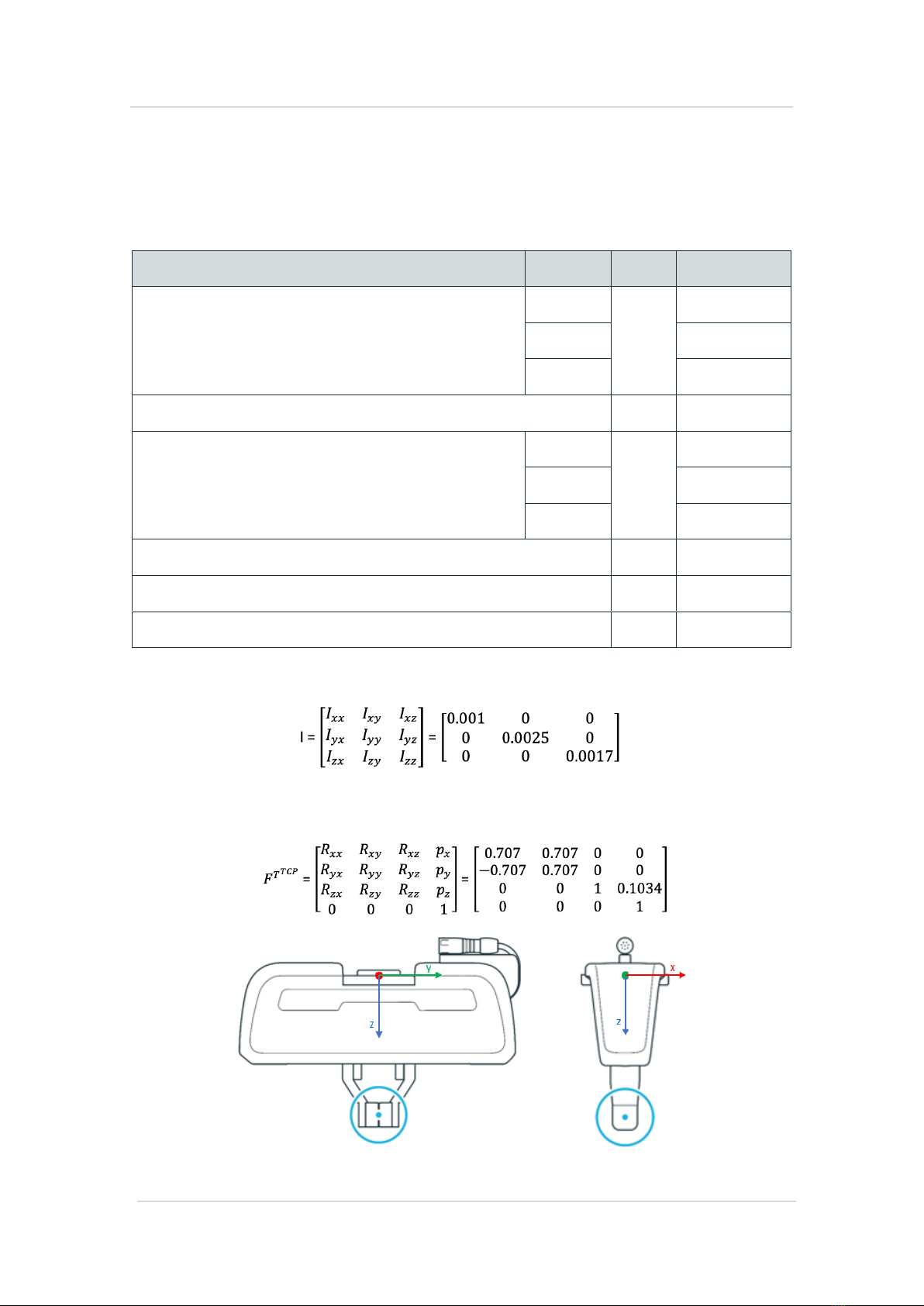
5.1 Mechanical Data .................................................................................................................................................10
5.2 Technical drawings.............................................................................................................................................11
5.2.1 Outer dimensions ..........................................................................................................................................11
5.2.2 Interface flange of Franka Hand.................................................................................................................11
5.2.3 Travel range....................................................................................................................................................12
5.2.4 Franka Hand to fingers interface................................................................................................................12
5.2.5 Finger to fingertips interface.......................................................................................................................13
5.2.6 Fingertips.........................................................................................................................................................13
6SCOPE OF DELIVERY ..............................................................................................................................................14
7INSTALLATION..........................................................................................................................................................15
7.1 Correct Site of Installation................................................................................................................................15
7.2 Mounting the Franka Hand ..............................................................................................................................16
7.3 Configuration.......................................................................................................................................................19
8Maintenance...............................................................................................................................................................21
8.1 Cleaning................................................................................................................................................................21
8.2 Disposal ................................................................................................................................................................21
9SERVICE AND SUPPORT ........................................................................................................................................22
10 PRODUCT CONFORMITY ...............................................................................................................................23
10.1 Declaration of Conformity...........................................................................................................................23
10.2 Further Statements .......................................................................................................................................24
10.3 Labeling............................................................................................................................................................24
11 USING THE FRANKA HAND...........................................................................................................................25
12 CUSTOMIZING...................................................................................................................................................27
13 TROUBLESHOOTING .......................................................................................................................................28
14 ADDITIONAL INFORMATION........................................................................................................................29
15 Table of figures ...................................................................................................................................................30
16 Index......................................................................................................................................................................31