CONTENTS
1.GENERAL.........................................................................................................1-1
1.1 POWER SUPPLY......................................................................................1-1
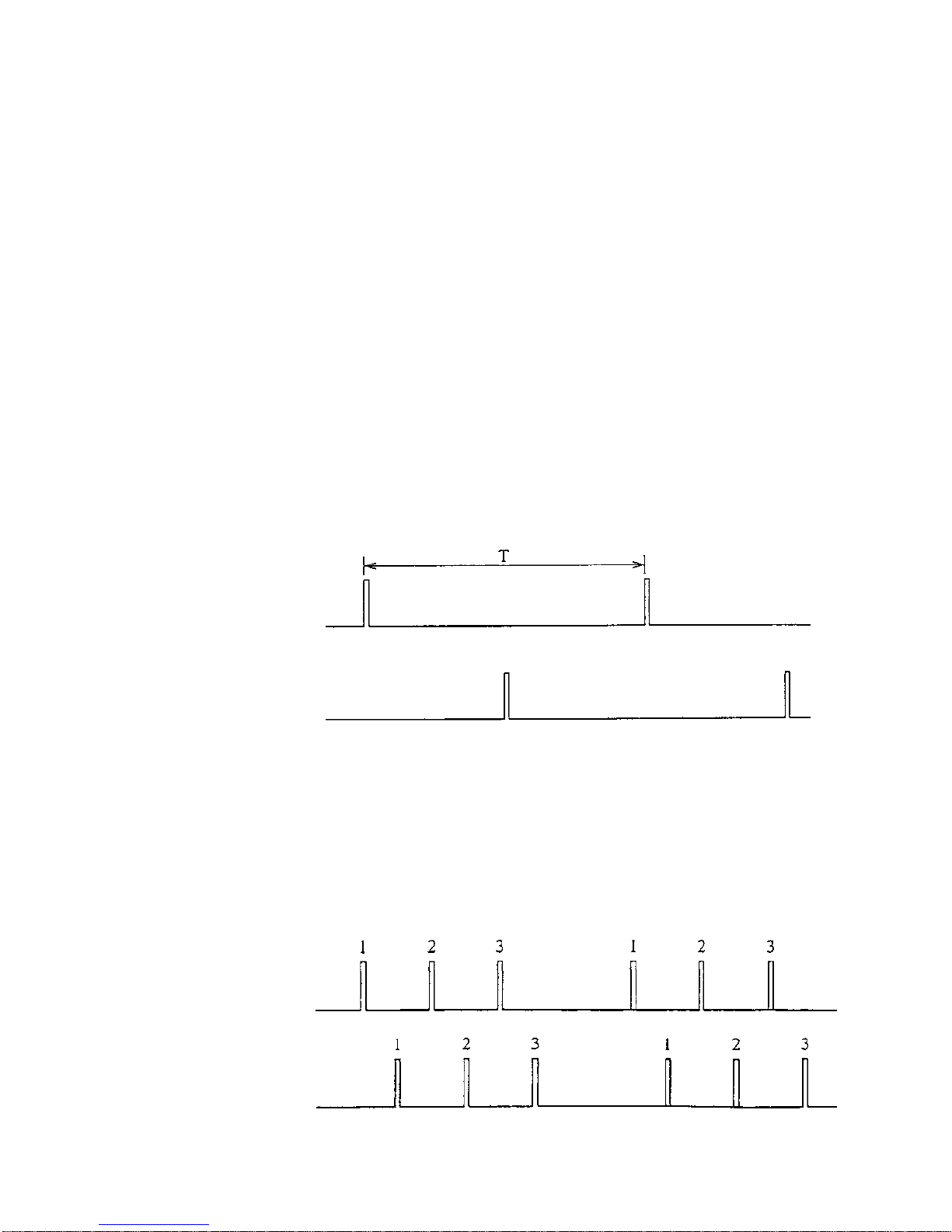
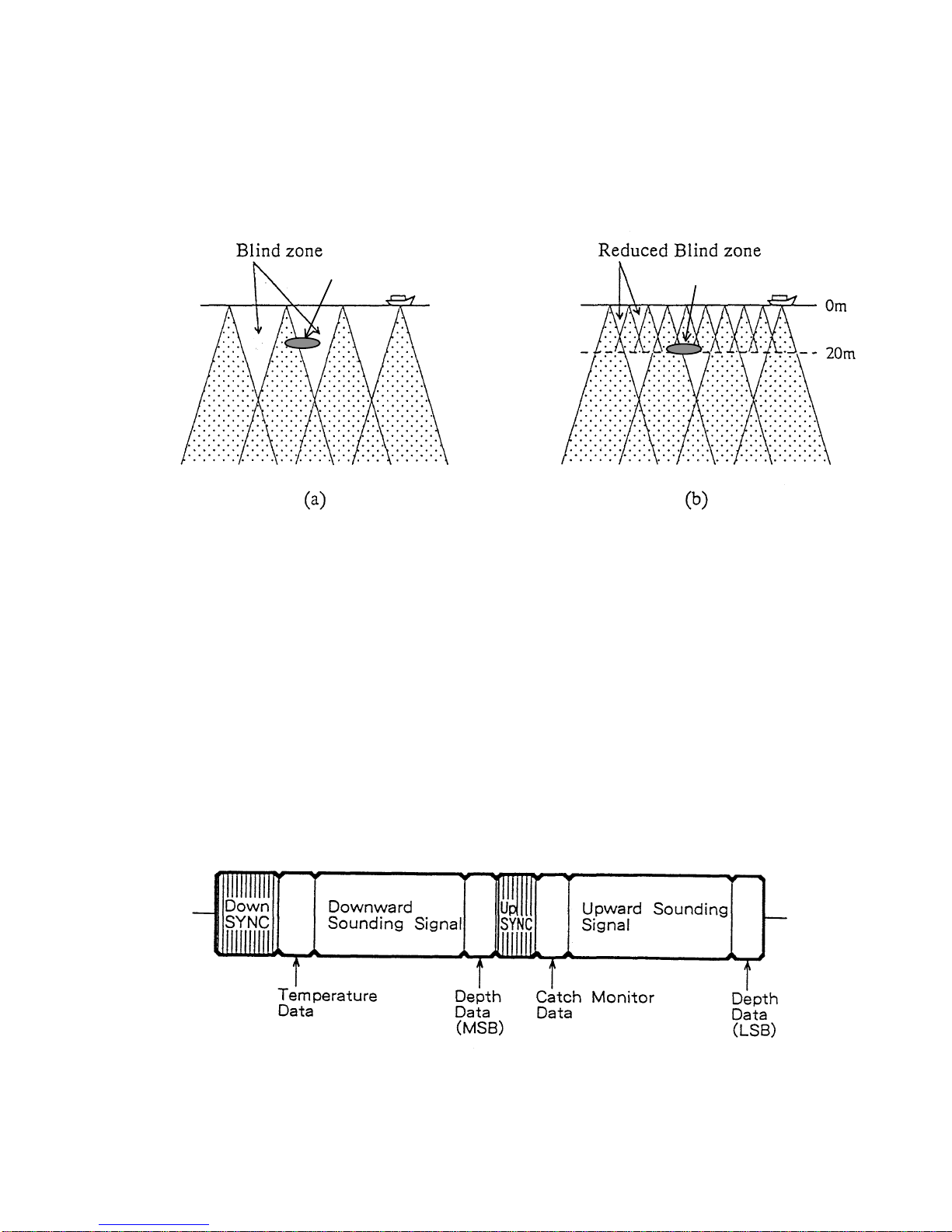
1.2 UPWARD AND DOWNWARD SOUNDING .............................................1-1
1.2.1 Sounding Rate ................................................................................1-1
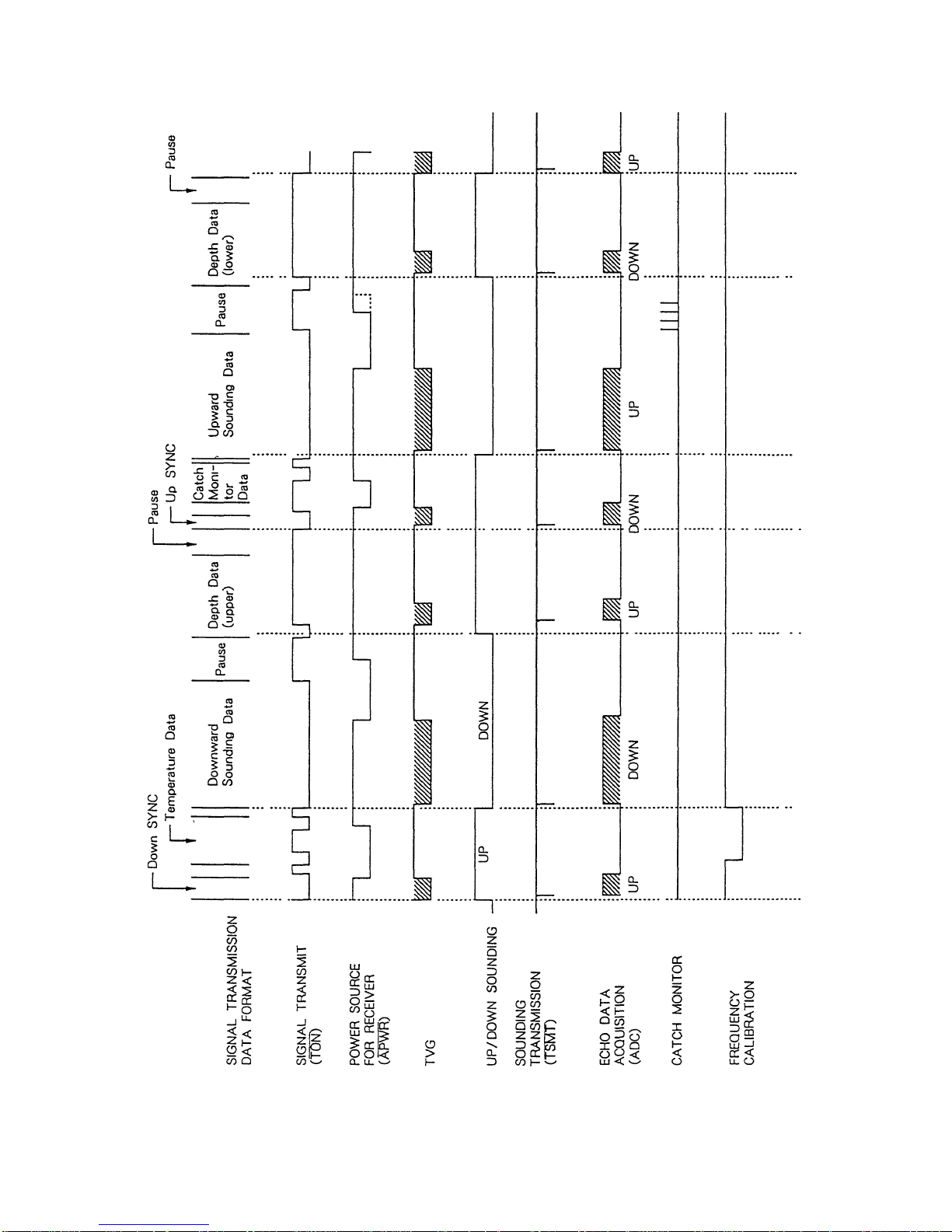
1.3 DATA FORMAT FROM TRANSMITTER UNIT ..........................................1-2
1.3.1 SYNC Code ....................................................................................1-3
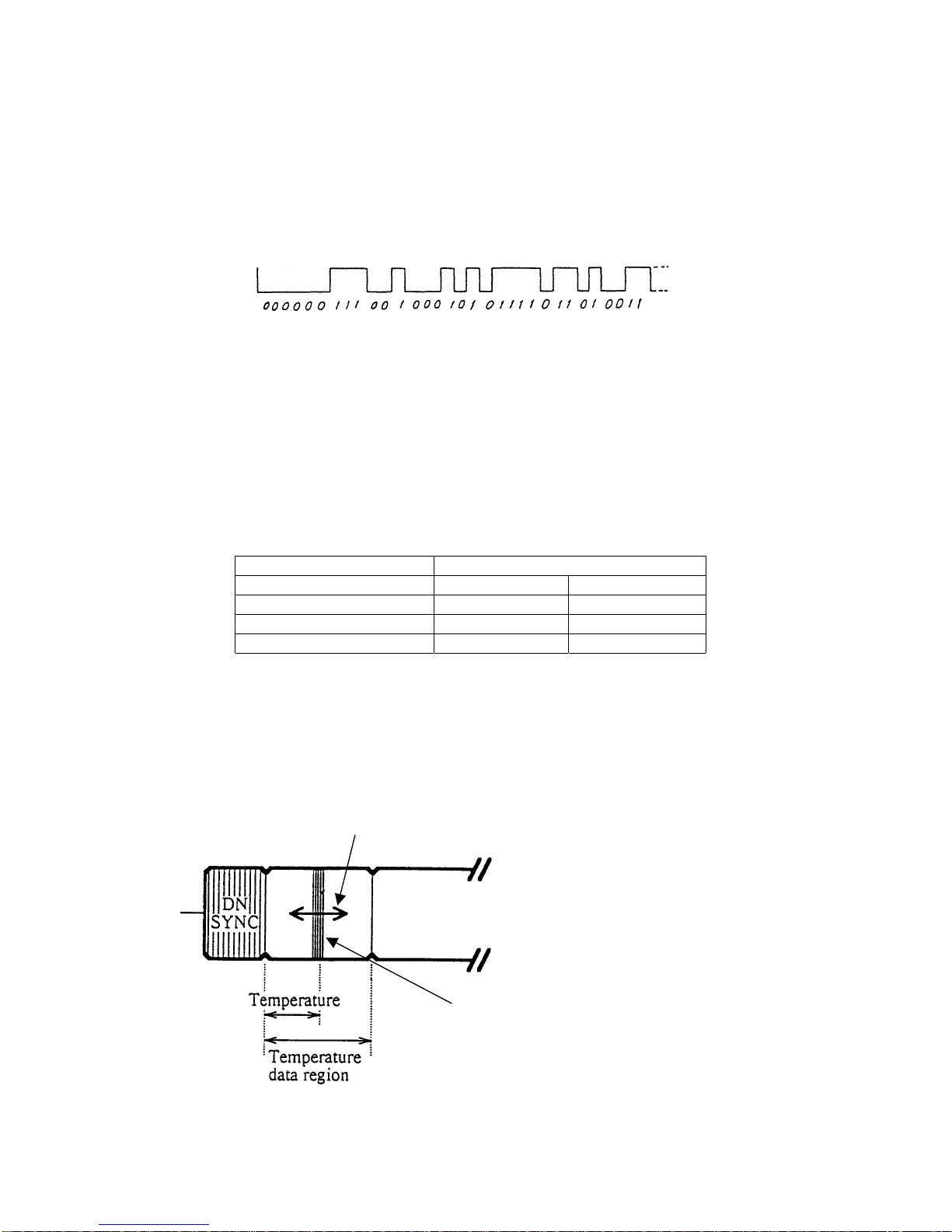
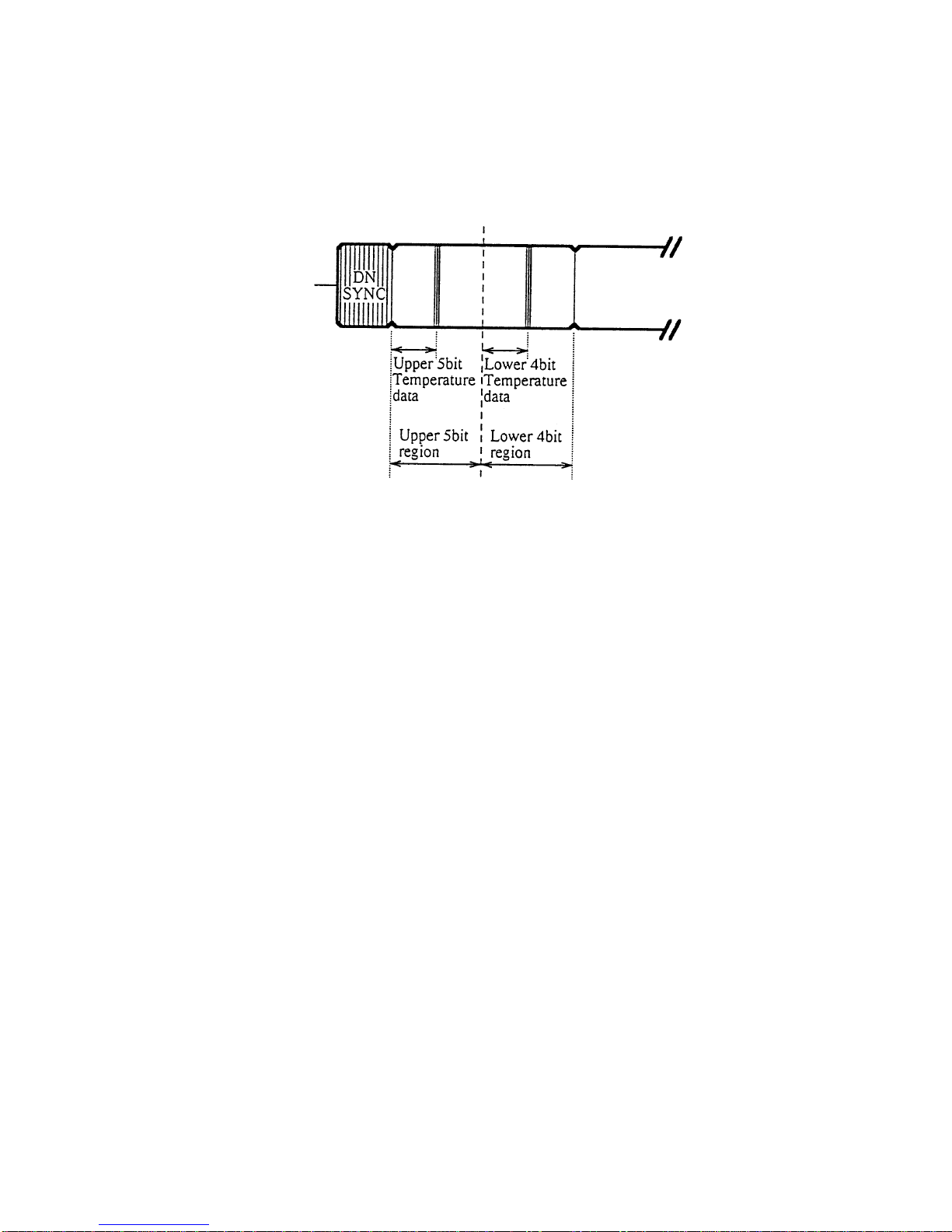
1.3.2Temperature Data ............................................................................1-3
1.3.3 Upward/Downward Sounding ..........................................................1-4
1.3.4 Depth Data ......................................................................................1-4
2.CIRCUIT DESCRIPTION ................................................................................2-1
2.1TRANSMITTER UNIT ..............................................................................2-1
2.1.1 Board Function ................................................................................2-1
2.1.2 Power ON/OFF Control ...................................................................2-1
2.1.3 Upward and Downward Soundings ..................................................2-1
2.1.4 Depth/Temperature Measurement (SEN Board) ..............................2-5
2.1.5 Signal Transmission (CONT-A, CONT-B Boards) .............................2-7
2.2 DISPLAY UNIT ........................................................................................2-10
2.2.1 Power Supply (POW 01P5727) .......................................................2-10
2.2.2 Receiver Board (AMP 01P5725) .....................................................2-12
2.2.3 Display and Signal Processor Board (DISP 01P5726) .....................2-12
3.CHECK AND ADJUSTMENT ..........................................................................3-1
3.1 DISPLAY UNIT CHECK ......................................................................
3-1
3.1.1Self-Check ................................................................................
3-1
3.1.2 Power Supply Circuit (POW Board 01P5737) ................................
3-2
3.2 TESTING FUNCTION IN AIR ..............................................................
3-2
3.2.1 Testing Transmitter Unit and Display Unit with Receiving Transducer. 3-2
3.2.2TestinginAirwithoutParavaneReceiver........................................
3-3
3.3ADJUSTINGTRANSMITTERUNIT
.......................................................
3-4
3.3.1GainAdjustment..........................................................................
3-4
3.3.2 Depth Indication Adjustment.........................................................
3-4
3.3.3 Adjusting Transmission Frequency on CONT.B Board......................
3-5
3.4ADJUSTMENTOFDISPLAYUNIT.......................................................
3-7
3.4.1ColorMonitorAdjustment.............................................................
3-7
3.4.2 DISP Board (01P5726).................................................................
3-8
4.CHANGE OF SPECIFICATIONS .....................................................................4-1
4.1DISPLAYUNIT ..................................................................................
4-1
4.1.1 Range Unit, Sounding Range, Data Format, etc ............................
4-1
4.2TRANSMITTERUNIT ........................................................................
4-3
4.2.1 Sounding Range..........................................................................
4-3
4.2.2SoundingRate ...........................................................................
4-4
4.2.3SignalTransmittingPower ...........................................................
4-4
4.2.4AdjustmentMode
.........................................................................
4-5
5.PARTS LOCATION............................................................................................
5-1
5.1DISPLAYUNIT....................................................................................
5-1
5.2 TRANSMITTER UNIT (CN-2220)..........................................................
5-6
6.BOARD INTERCHANGEABILITY.....................................................................6-1
6.1DISPLAYUNIT....................................................................................
6-1
6.2TRANSMITTERUNIT..........................................................................
6-2