System Description
Table
of
Contents
<Contents>
1. System Description .................................................................................................................
···
..
·
..
············3
1.1. Introduction .......................................................................·
..
··
..
·....·······....·
..
···
....···
..
··..
·
..
·....····
..
········
..
··3
1.1.1. Features .......................................................................................................................................... 4
1.1.2. Installation ...........................................................................·....·
..
··
..
·
..
····
..
·..........
··..
·....
··..
·
..
·....·....
··4
1.1.3. Man-Machine Interface ...................................................................····
..
·
..
··
..
··
....
··
..
·····
..
·
..
········
..
··4
1.1.4. Communication Bus System ............................................................................................
··
....·
..
4
1.1.5.
Unmanned
Monitoring ..........................................................................····....·....·····
..
····
..
·
..
·....·
..
·4
1.1.6. System Structure .....................................................................
···
....······
..
···
..
·····
..
···
..
··
..
·······
..
····
..
···6
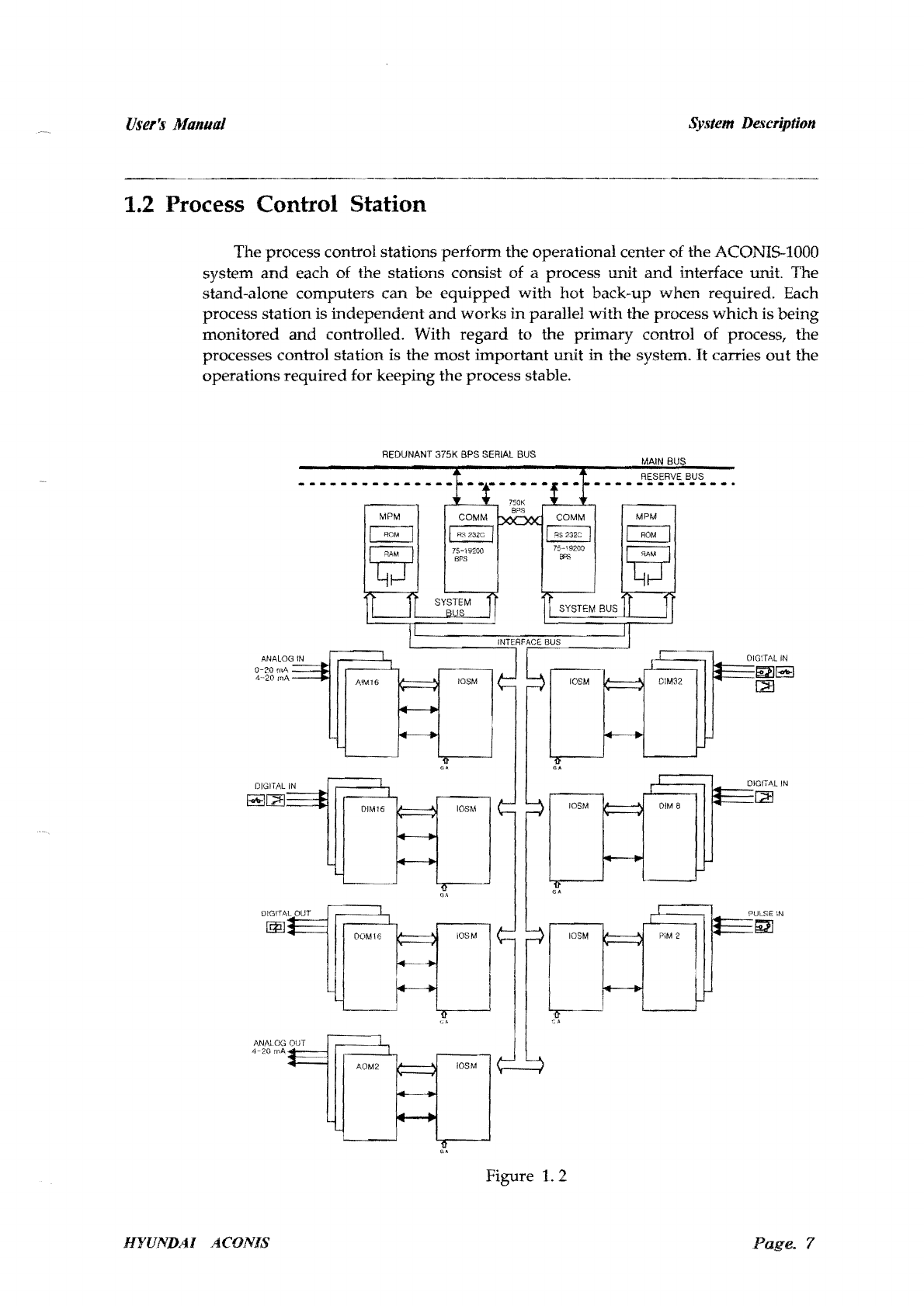
1.2. Process Control Station ............................................................................................·..........·
....
··
....····7
1.2.1. Process
unit
.....................................................................
···
..
·
..
·
..
·····
..
··
......
···
..
····
..
·
..
·
..
··..
·
..
·····
..
······8
1.2.2. Interface unit .................................................................................................................................. 8
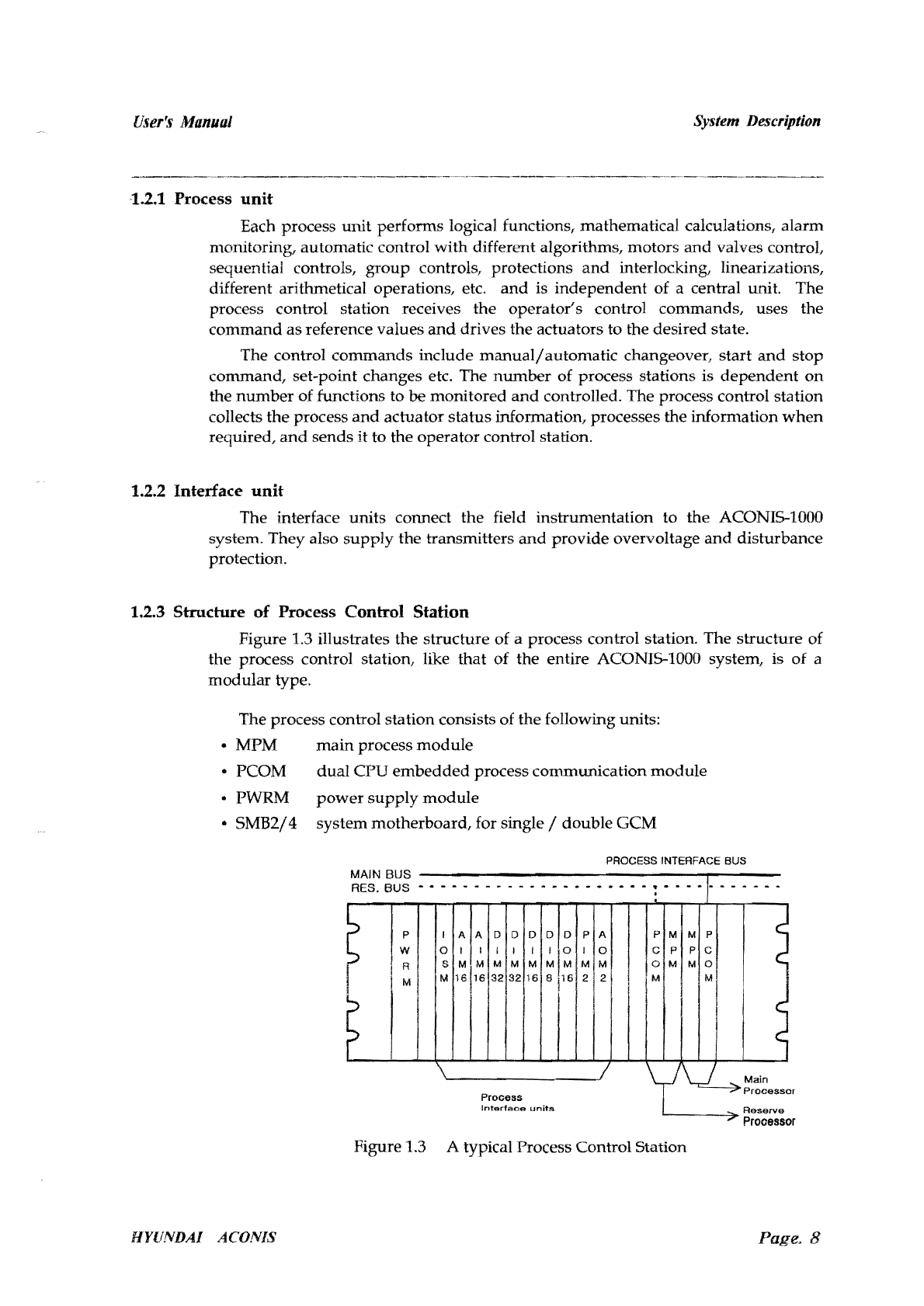
1.2.3. Structure of Process Control Station ....................................................................................... 8
1.3. Server Control Station ........................................................................................................................ 9
1.3.1.
Hardware
Structure
of
Server control Station ....
··
..
·
..
·........·
....
·
..
·
..
·....·
..
···
................·......·
..
10
1.4. Miniature Remote Terminal Unit
and
Real-Time Control Station ·......·
..
·
....
·......·......·....·
..
·
..
11
1.4.1.
Hardware
Structure .............................................................................
··
..
······....·....·····..........
··
..
·11
1.5. Operator Control Stations .....................................................................·····
..
·····
..
···
..
········
..
··
..
····
..
·
..
·12
1.5.1. Video Client .................................................................................
··
..
··
..
·
..
·
..
··
..
··
......·
..··
....
··
..
·
..
··
..
··12
1.5.1.].
Hardware
Structure
of
Video Client
··
....·
..
·....···
..··..··
....·
..
···
..........·......·....····......·
..
·
..
·12
15.1.2.
Display Structure of Video Client ......·
..
·..........····........................·......·......
··
............·...... 13
1.5.2. Alarm Server ..............................................................................................·....·
..
·........·
..
·
..
·
..
·......·14
1.5.2.1.
Hardware
Structure of Alarm Server ·....·
..
···
..
·........
··
......
··
..
·
..
·
....
·
..
·
....
·......................·
..
·14
1.5.2.2. Alarm Printing ........................................................................·····..........
··..··
....
···
..
·····
....
···
..
14
1.5.2.3. Log Printing .........................................................................
··..
·
..
·
..
······........·······
..
·....······
..
·15
1.5.2.4. EAS Management ...............................................................········
..
·
..
··········
..
·····
..
·········
....
···16
1.5.3. Operator Control Station's Communication ....
··
..
·............·......·
..
·
....
·......·......
··..
·........·........·17
1.6. Communication Interface Gateway ....·
....
··
....
·
....
·
....
·
....
··
..........
··
..
·......
·18
1..6.1.
l1ardware structure ...................................................................
···
..
·
..··
..
····....···············
..
··········
..
18
Page. 2
HYUNDAI
ACONIS