Jewell Instruments DX Series User Manual V.81814
2
Contents
1. General Information...................................................................................................................6
A. About this Manual ..................................................................................................................6
i. Related Documentation / Applications.........................................................................6
ii. Documentation Conventions...........................................................................................6
B. Warranty ...................................................................................................................................7
2. Product Overview.......................................................................................................................8
A. Introduction to the DX Series ................................................................................................8
i. Features and Options.........................................................................................................8
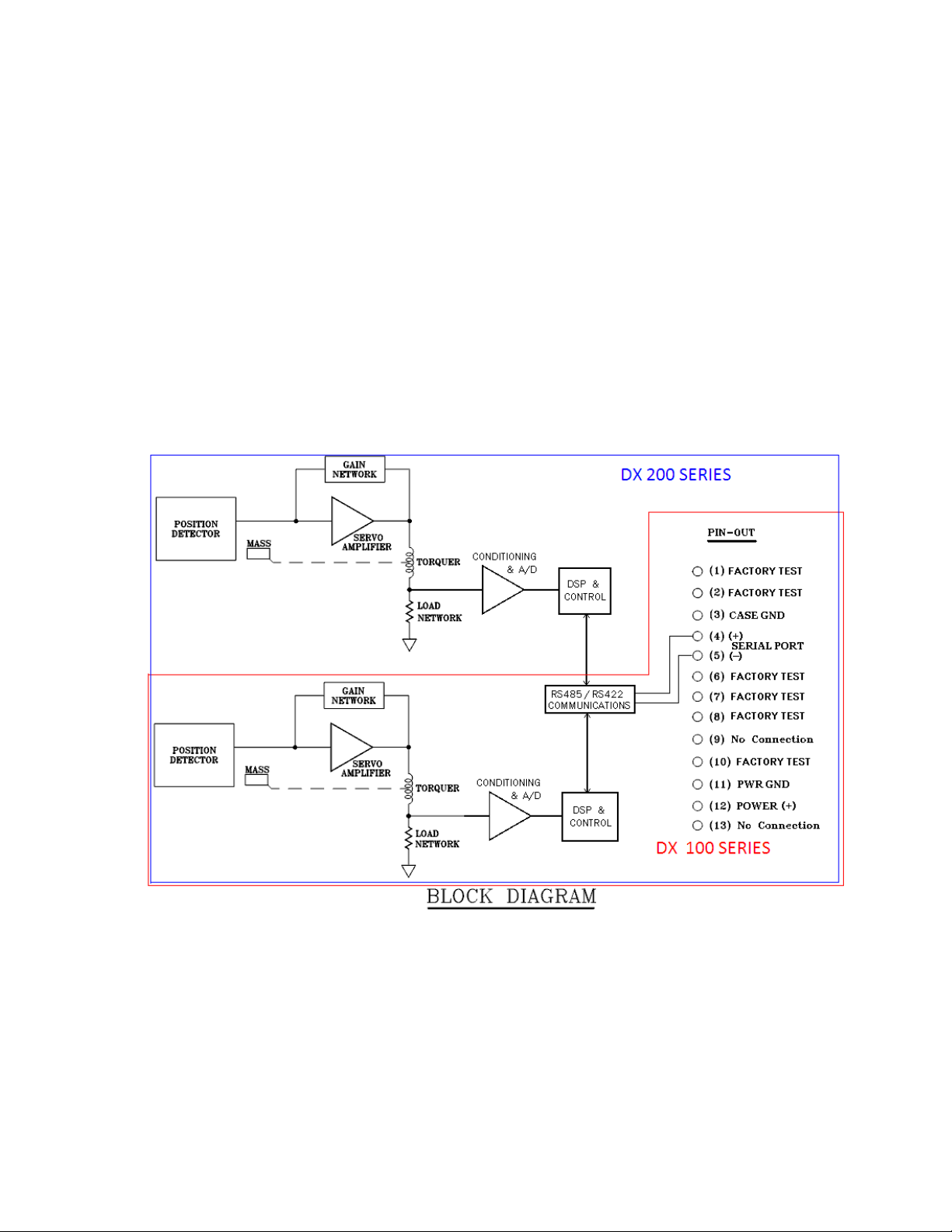
ii. Internal Diagram .................................................................................................................9
iii. Typical Applications .........................................................................................................10
B. DX Series Installation.............................................................................................................10
i. Mechanical........................................................................................................................10
ii. Electrical .............................................................................................................................12
3. Basic Operating Tenants.........................................................................................................13
A. Getting Started......................................................................................................................13
i. Default Settings..................................................................................................................13
ii. Terminal Programs.............................................................................................................14
iii. Connecting to the Serial Interface ...............................................................................14
B. Operational Modes..............................................................................................................14
i. RS422....................................................................................................................................15
ii. RS485....................................................................................................................................15
iii. Temporary RS485...............................................................................................................15
C. Serial Communications........................................................................................................16
i. Packet Structure................................................................................................................16
ii. Using DX Series Commands ............................................................................................19
4. Building Command Structures...................................................................................................20
A. Full List of Serial Commands................................................................................................21
i. Configuring Measurement Outputs ..............................................................................21
ii. Configuring Transmission Parameters ...........................................................................25
iii. Maintenance and Infrastructure Inputs .......................................................................29