B-06-1006, Rev. E Tuff Tilt Digital 1
TUFF TILT DIGITAL TILTMETER
TABLE OF CONTENTS
1 - INTRODUCTION......................................................................................................................................2
2 - INSTALLING THE TILTMETER, MAKING CONNECTIONS, TILT DIRECTIONS.......................... 6
3 - POWER REQUIREMENTS AND GROUNDING .............................................................................. 6
4 - COMMUNICATING WITH THE TUFF TILT ..................................................................................... 9
4.1 Basic Requirements and Settings ........................................................................................... 9
4.2 Firmware Command Format..................................................................................................... 9
4.3 Firmware Command Summary............................................................................................... 10
4.4 Sample Data Using the XY Command................................................................................... 12
5 - MAINTENANCE AND TROUBLESHOOTING ............................................................................... 13
APPENDIX A - FIRMWARE COMMANDS.......................................................................................... 14
APPENDIX B - ZAGI GRAPHICAL INTERFACE SOFTWARE (Installation & Operation) .............. 28
1 Introduction................................................................................................................................. 29
2 System Requirements................................................................................................................ 29
3 Installing ZAGI ............................................................................................................................ 29
4 Configuring Communications................................................................................................... 30
5 Data Access ................................................................................................................................ 31
6 Command Line Menu Options .................................................................................................. 32
7 Screen Options........................................................................................................................... 33
8 Equivalent Firmware Commands.............................................................................................. 34
9 Event Markers; Plotting Saved Files ........................................................................................ 35
10 Data Logging to Tiltmeter Memory........................................................................................... 35
11 Data File Format......................................................................................................................... 36
12 Printing........................................................................................................................................ 37
APPENDIX C - WARRANTY AND LIMITATION OF LIABILITY......................................................... 39
APPENDIX D - REVISION RECORD................................................................................................... 41
LIST OF FIGURES:
Figure 1: The Tuff Tilt Digital ............................................................................................................... 2
Figure 2: Instrument Mounting Hole Locations.................................................................................... 3
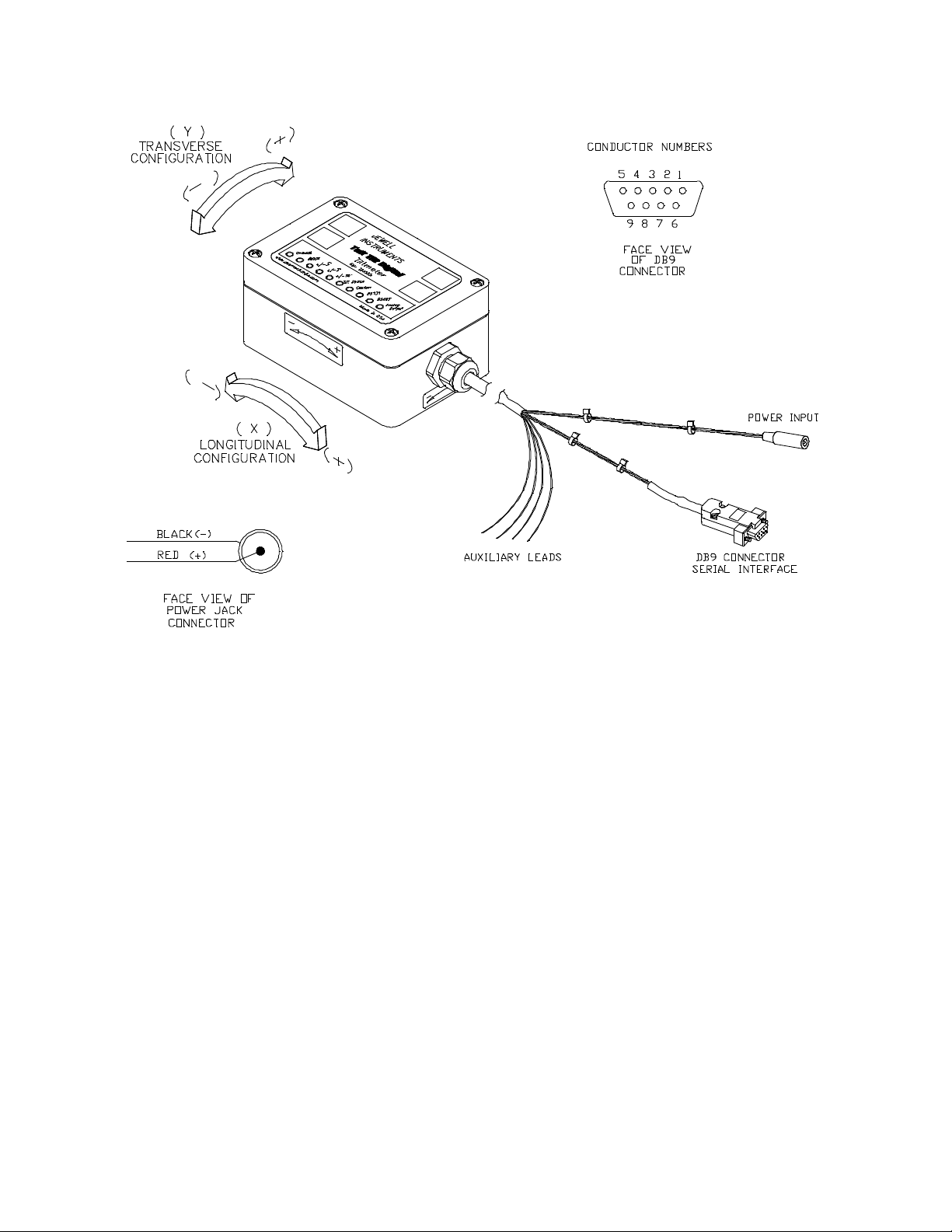
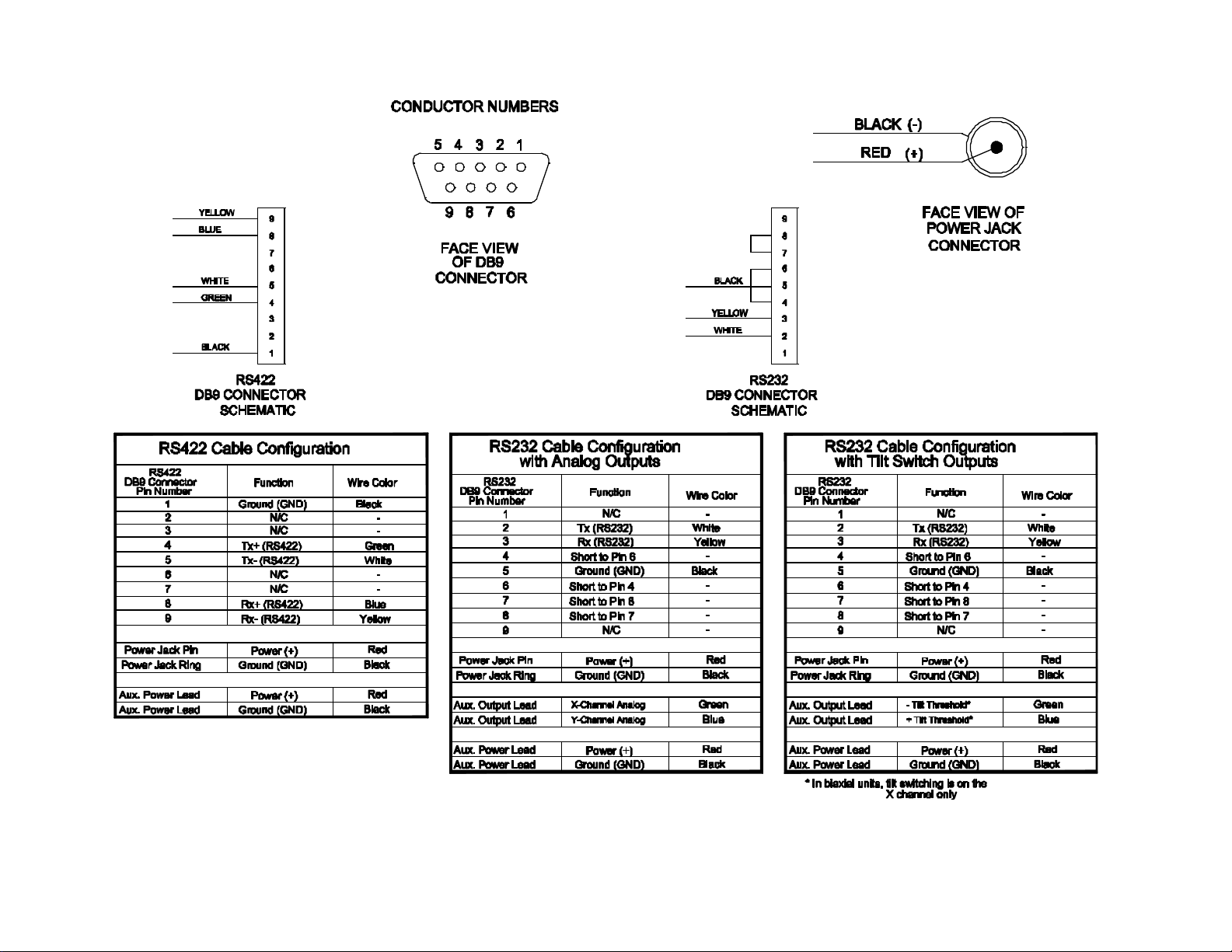
Figure 3: Cable Termination Detail...................................................................................................... 4
Figure 4: Wiring Connections .............................................................................................................. 5
Figure 5: Installation Methods.............................................................................................................. 7
Figure 6: Box Mounting Details............................................................................................................ 8