MRE-280 Descriptions
Operation Manual
93144222-01 1
1. General
The Automatic Tracking Aid (ATA, herein after) MRE-280 is a built-in type optional adaptor unit
developed for KODEN marine radar sets. The ATA predicts the motion of the selected targets by
processing the radar video signal supplied from the radar set. Up to ten targets can be acquired
manually or automatically and tracked automatically. The ATA unit outputs various navigational
information of the selected target to the radar display including CPA (Closest Point of Approach), TCPA
(Time to CPA), target’s speed and course, etc. This data is processed and displayed on the screen in
vector and numeric forms. The ATA also provides audio and visual warnings to alert the operator that
the target is about to infringe the preset CPA and TCPA limits.
1.1Precautions
Please take the following precautions in order to avoid possible adverse situation caused by
misinterpretation of the information supplied from the MRE-280 unit.
(1) The ATA is a simplified collision avoidance aid, providing navigational information for assisting safe
navigation. The ship’s officer must make the final maneuvering decision.
(2) For using ATA functions your own ship’s heading and speed data must be entered from
navigational sensor devices. As a bearing sensor you need to connect a gyrocompass or a satellite
compass. As a speed sensor, you need to connect a speed log (pressure log, Doppler speed log,
etc) or a Navigator unit.
(3) The tracking capability of the ATA depends on the performance of the sensors used. Tracking may
become erroneous when the compass or speed log data is inaccurate.
2. Specifications
(1) Acquisition Full auto or half-auto/half-manual acquisition
(2) Tracking Automatic
(3) Number of tracked targets 10 targets maximum
(4) ATA data output Target number, distance, bearing, speed, course, CPA and
TCPA
(5) Alarm Collision alarm, activated when a target enters the preset CPA
and TCPA limits
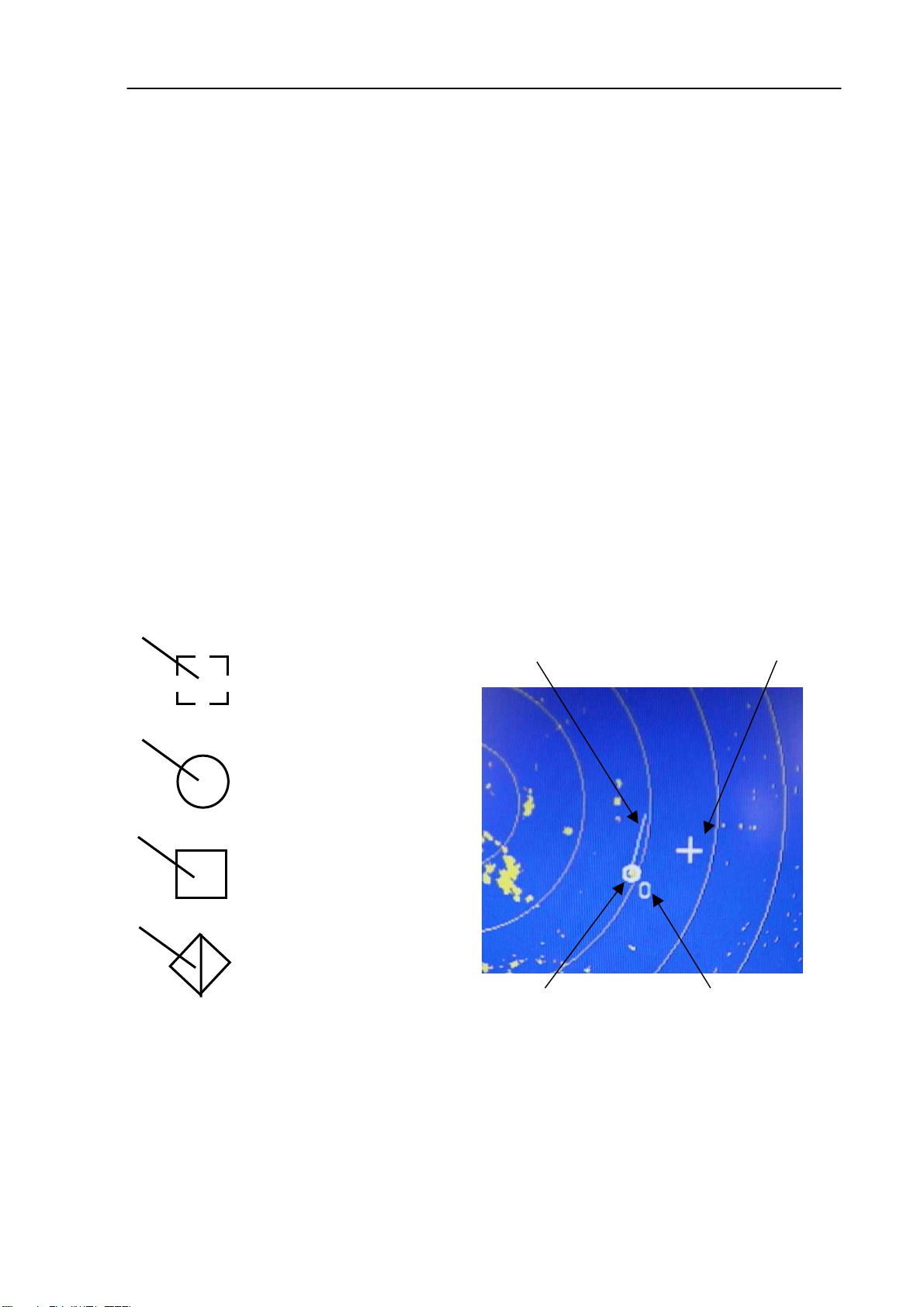
(6) Display Symbols: Predicted point and target number
Vector: Predicted motion of a target calculated from the ship’s
speed and bearing information supplied from each sensor.
(7) Tracking range 0.5 to 40 NM
(8) PRF 2,000 Hz maximum
(9) Bearing signal rate 1,080 or 2,048 pulses / rev (Switched automatically) See
NOTE