Contents
I
TableofContents
1. Introduction, FeaturesandApplications....................................................................1
Introduction...........................................................................................................1
Features.................................................................................................................1
Applications..........................................................................................................1
2. Specifications............................................................................................................2
ElectricalSpecifications........................................................................................2
MechanicalSpecifications.....................................................................................2
EliminationofHeat...............................................................................................2
OperatingEnvironmentandotherSpecifications..................................................3
3. PinAssignmentandDescription...............................................................................3
ConnectorP1 Configurations................................................................................3
SelectingActivePulseEdgeandControlSignalMode........................................4
ConnectorP2 Configurations................................................................................4
4. ControlSignalConnector(P1)Interface...................................................................4
5. Connecting theMotor................................................................................................5
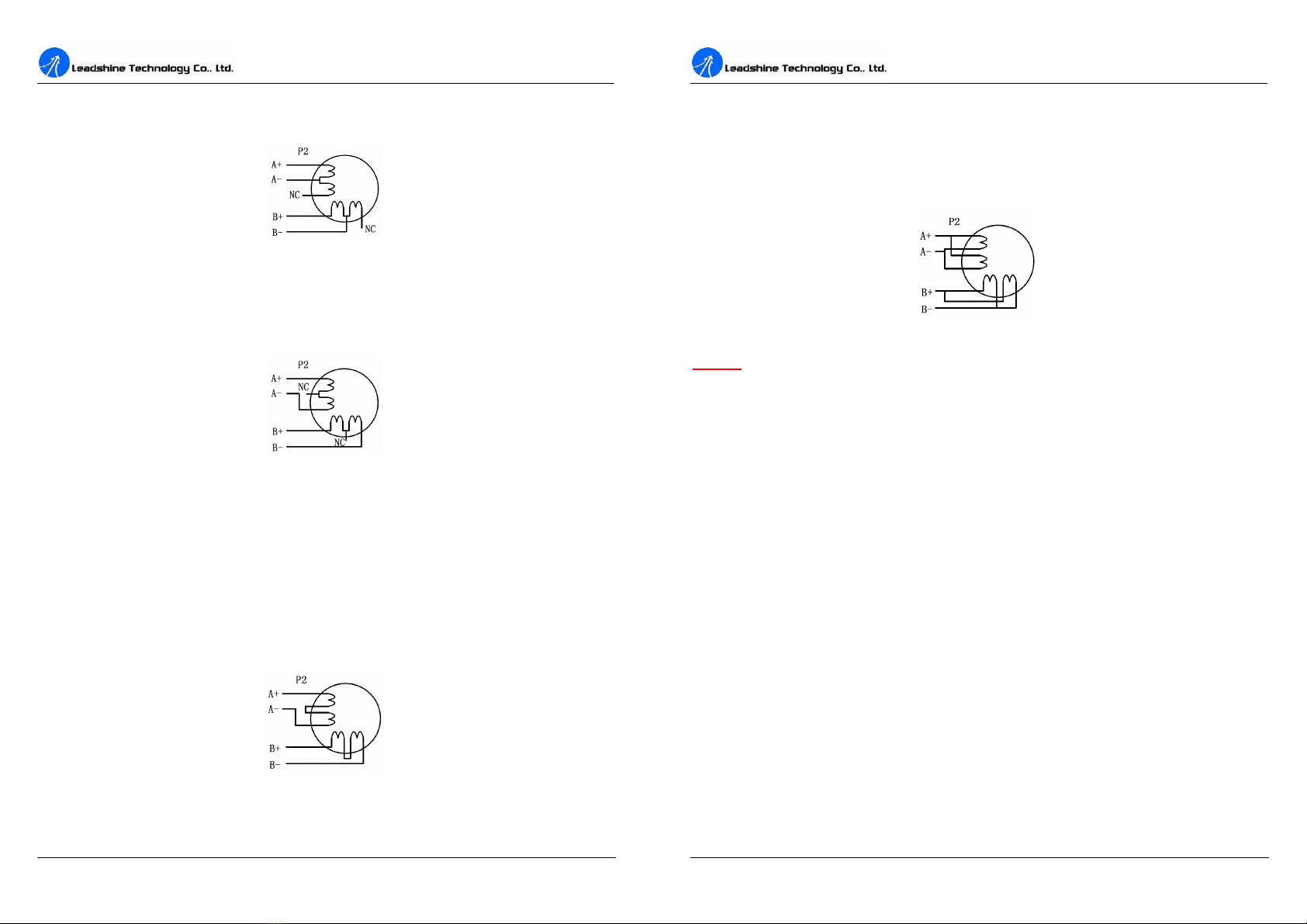
Connectionsto4-leadMotors...............................................................................5
Connectionsto6-leadMotors...............................................................................5
HalfCoil Configurations...............................................................................5
FullCoil Configurations................................................................................6
Connectionsto8-leadMotors...............................................................................6
SeriesConnections........................................................................................6
ParallelConnections......................................................................................7
6. PowerSupplySelection............................................................................................7
RegulatedorUnregulatedPowerSupply..............................................................7
MultipleDrivers....................................................................................................8
SelectingSupplyVoltage.......................................................................................8
7. SelectingMicrostepResolutionand DriverOutputCurrent.....................................8
MicrostepResolutionSelection............................................................................8
CurrentSettings.....................................................................................................9
Contents
II
Dynamiccurrentsetting................................................................................9
Standstill currentsetting..............................................................................10
8. Wiring Notes...........................................................................................................10
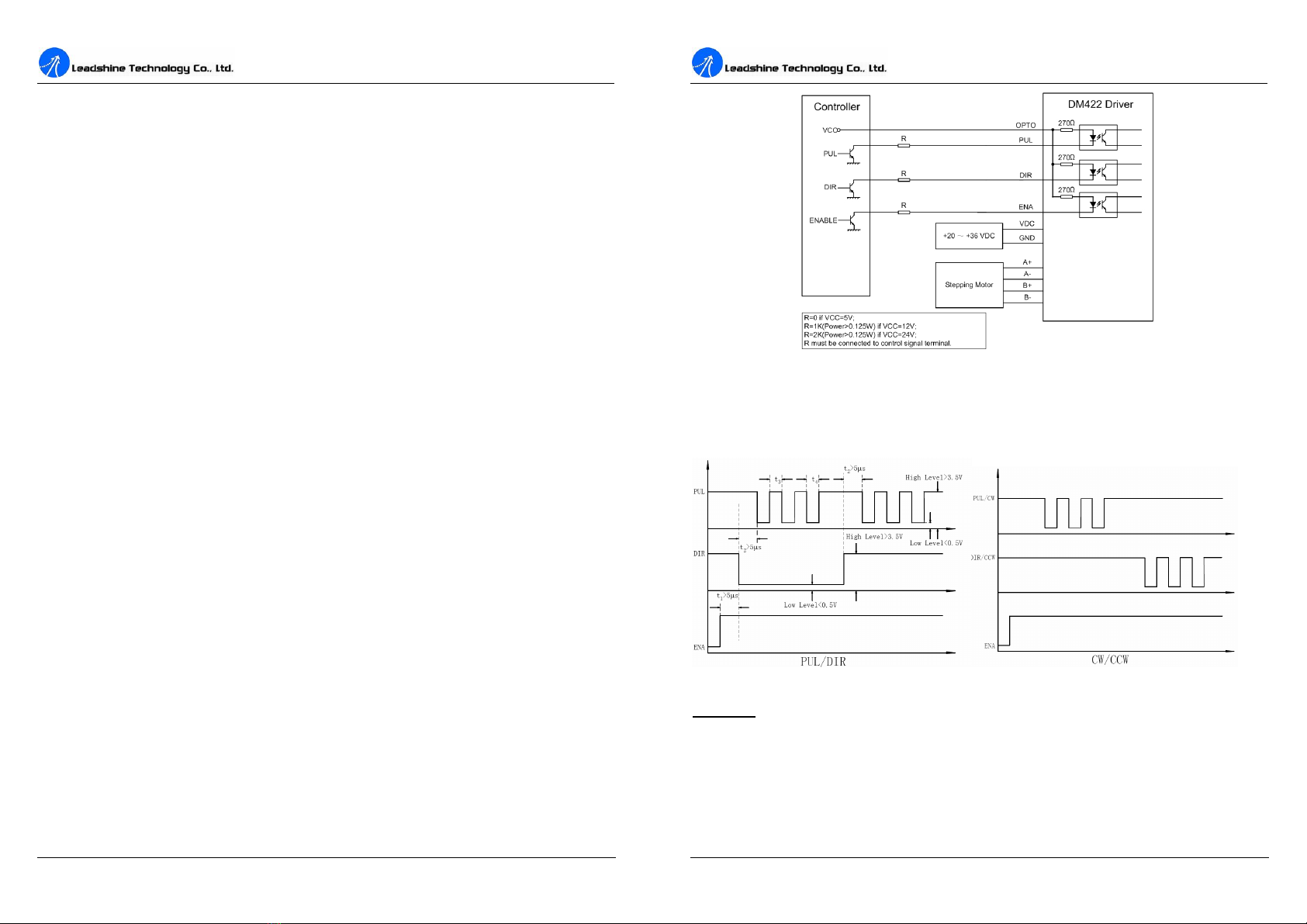
9. TypicalConnection..................................................................................................10
10. Sequence ChartofControlSignals.......................................................................11
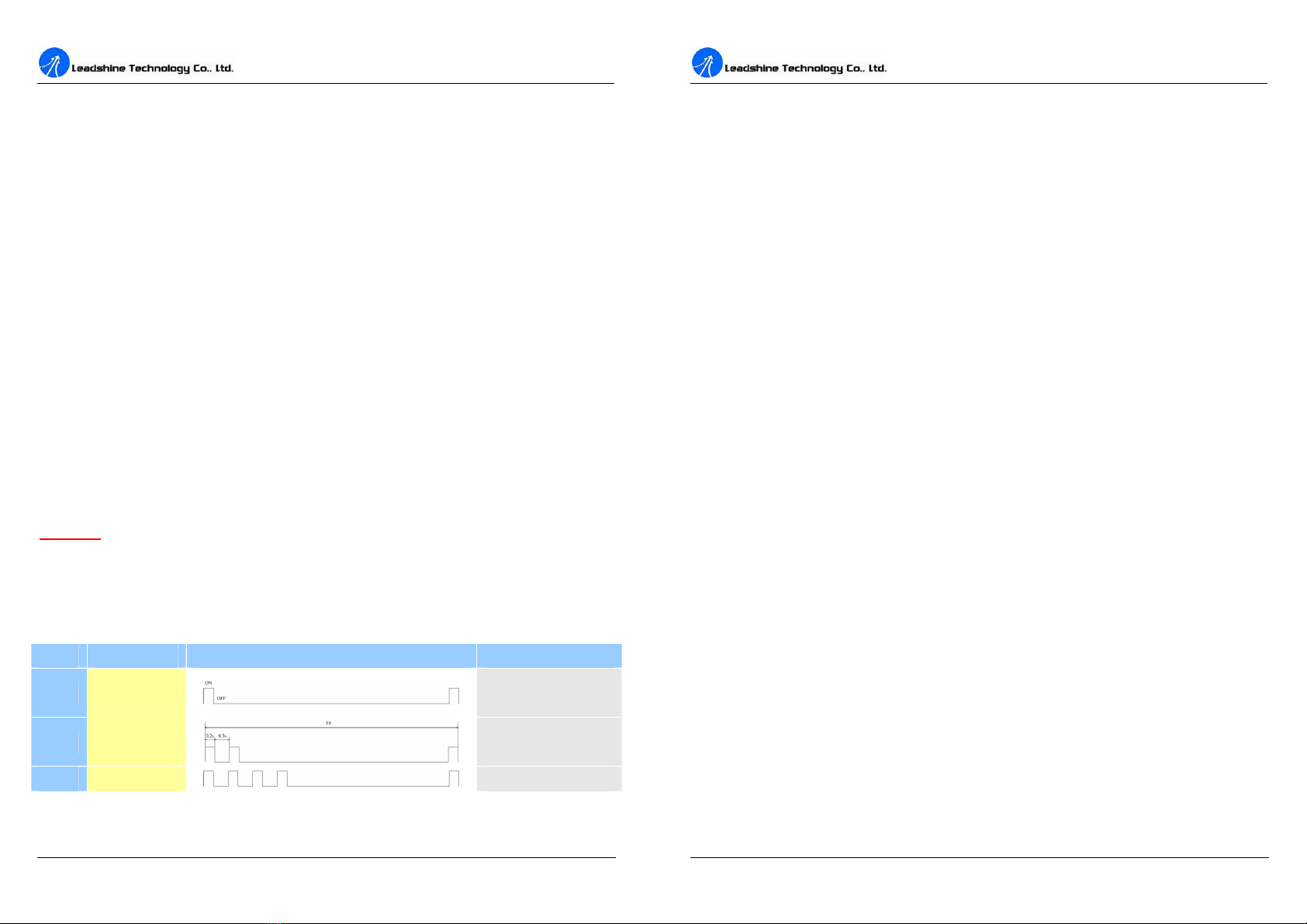
11. ProtectionFunctions..............................................................................................12
Over-currentProtection...............................................................................12
Over-voltageProtection..............................................................................12
PhaseErrorProtection.................................................................................12
ProtectionIndications..................................................................................12
12. FrequentlyAskedQuestions..................................................................................13
ProblemSymptomsand PossibleCauses............................................................14
13. ProfessionalTuningSoftwareProTuner................................................................15
Introduction.........................................................................................................15
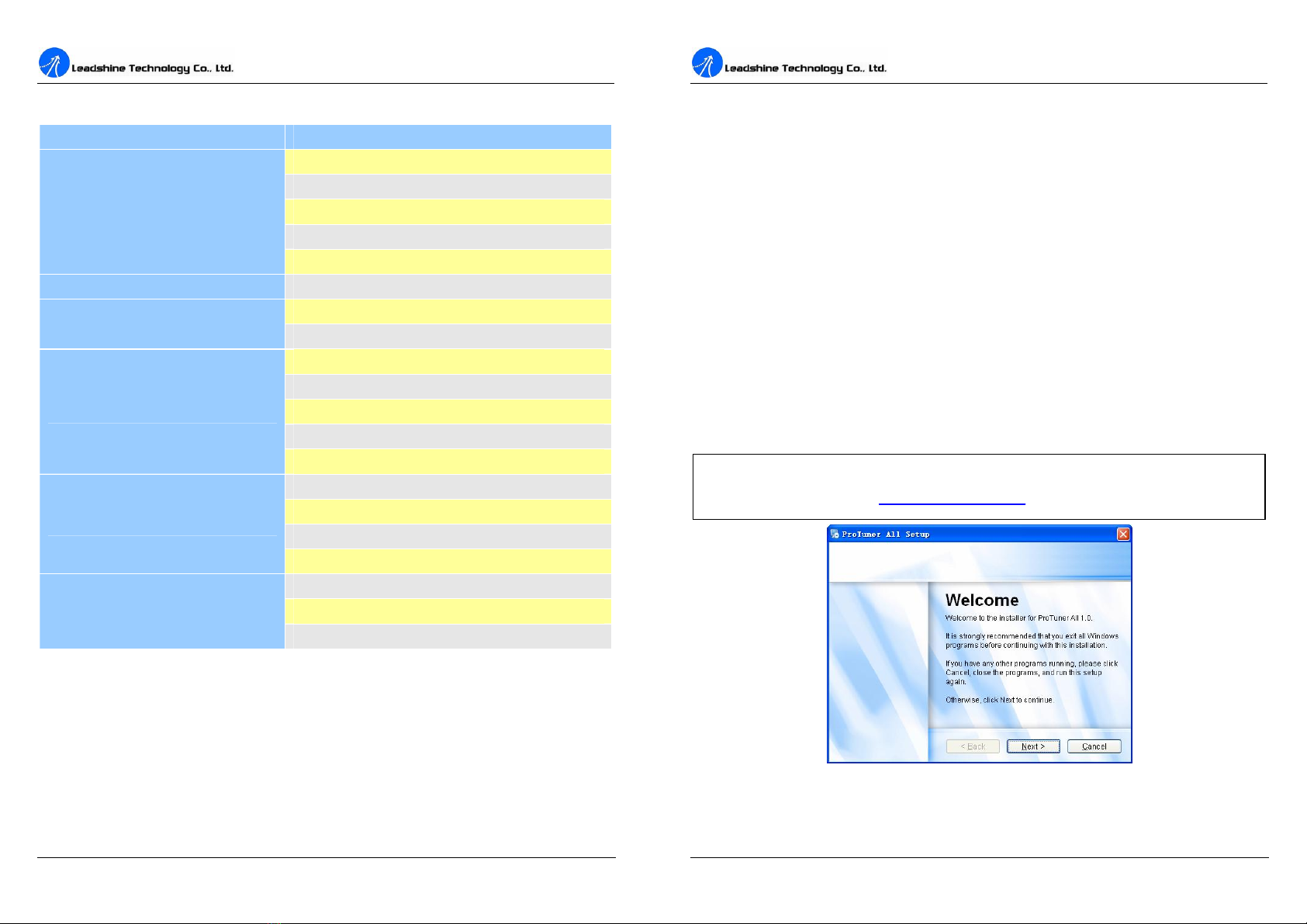
SoftwareInstallation...........................................................................................15
ConnectionsandTesting.....................................................................................19
RS232 Interface Connection...............................................................................19
TestingtheSteppingSystem...............................................................................19
SoftwareIntroduction..........................................................................................20
ProTunerMain Window..............................................................................20
ProTunerToolbar.........................................................................................20
Option..........................................................................................................21
ComConfig Window..................................................................................21
ParametersConfiguration Window.............................................................21
Tuning.........................................................................................................22
Anti-ResonanceIntroduction......................................................................25
InternalPluser.............................................................................................26
ProcedureforAchieving OptimumPerformance........................................27
Err_check....................................................................................................28
About...........................................................................................................29
APPENDIX.................................................................................................................29