Inhalt
1Safety precautions................................................................................3
2Overview ..............................................................................................7
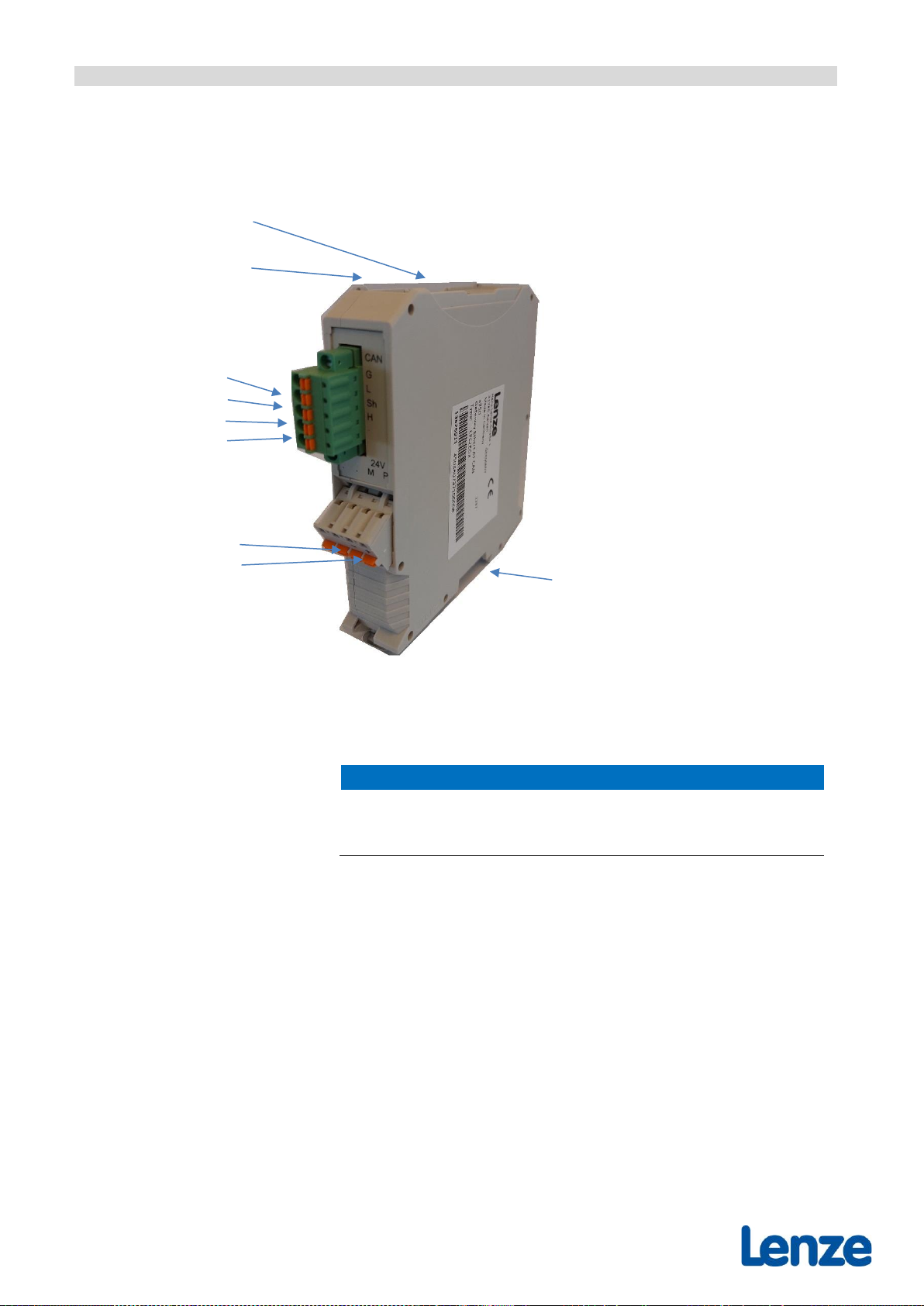
3Hardware Description...........................................................................8
3.1 Connections .........................................................................................8
3.2 LEDs.....................................................................................................9
3.2.1 LED Assignment...................................................................................9
4Hardware Installation..........................................................................11
5Configuration......................................................................................12
5.1 Application Example...........................................................................12
5.2 Configuration Sequence.....................................................................12
5.2.1 Step 1: Add Gateway .........................................................................13
5.2.2 Step 2: Add CANOpen Devices to the Project....................................13
5.2.3 Step 3: Configure the Gateway ..........................................................14
6EtherCAT Communication..................................................................16
6.1 CAN Interface.....................................................................................16
6.1.1 Object Dictionary Structure.................................................................16
6.1.2 Object Dictionary................................................................................17
6.1.3 Standard Objects (1000h...1FFFh)......................................................18
6.1.4 Manufacturer Specific Objects (2000h-5FFFh)....................................22
6.1.5 Profile Specific Objects (6000h-FFFFh)...............................................26
7Technical Data ...................................................................................37
7.1 General Technical Data......................................................................37
7.2 Microprocessor and Memory..............................................................37
7.3 CAN Interface.....................................................................................37
7.4 EtherCAT Interface.............................................................................38
7.5 Operating System and License Information........................................38
8Interfaces and Connector Assignments..............................................39
8.1 24V-Power Supply Voltage.................................................................39
8.2 CAN....................................................................................................40
8.2.1 CAN Connector ..................................................................................40
8.3 EtherCAT............................................................................................42
8.4 Conductor Connection/ Conductor Cross Sections...........................43
9Order Information...............................................................................44
10 License Terms....................................................................................45
10.1 GPL V1...............................................................................................45
10.2 GPL V2...............................................................................................46
10.3 OpenBSD License..............................................................................47
10.4 MIT Lizenz..........................................................................................47