Obere Schloßstr.131
73553 Alfdorf
07172 / 93730-0
Fax 07172 /93730-22
E-Mail: info@lorenz-sensors.com
Technical changes reserved
Internet: www.lorenz-sensors.com
Contents
1Read First.............................................................................................................................................. 4
1.1 Safety and Caution Symbols.......................................................................................................... 4
1.2 Intended Use.................................................................................................................................. 4
1.3 Dangers.......................................................................................................................................... 4
1.3.1 Neglecting of Safety Notes ..................................................................................................... 4
1.3.2 Remaining Dangers ................................................................................................................ 4
1.4 Reconstructions and Modifications ................................................................................................ 4
1.5 Personnel ....................................................................................................................................... 4
1.6 Warning Notes ............................................................................................................................... 4
2Term Definitions .................................................................................................................................... 5
2.1 Terms ............................................................................................................................................. 5
3Product Description ............................................................................................................................... 5
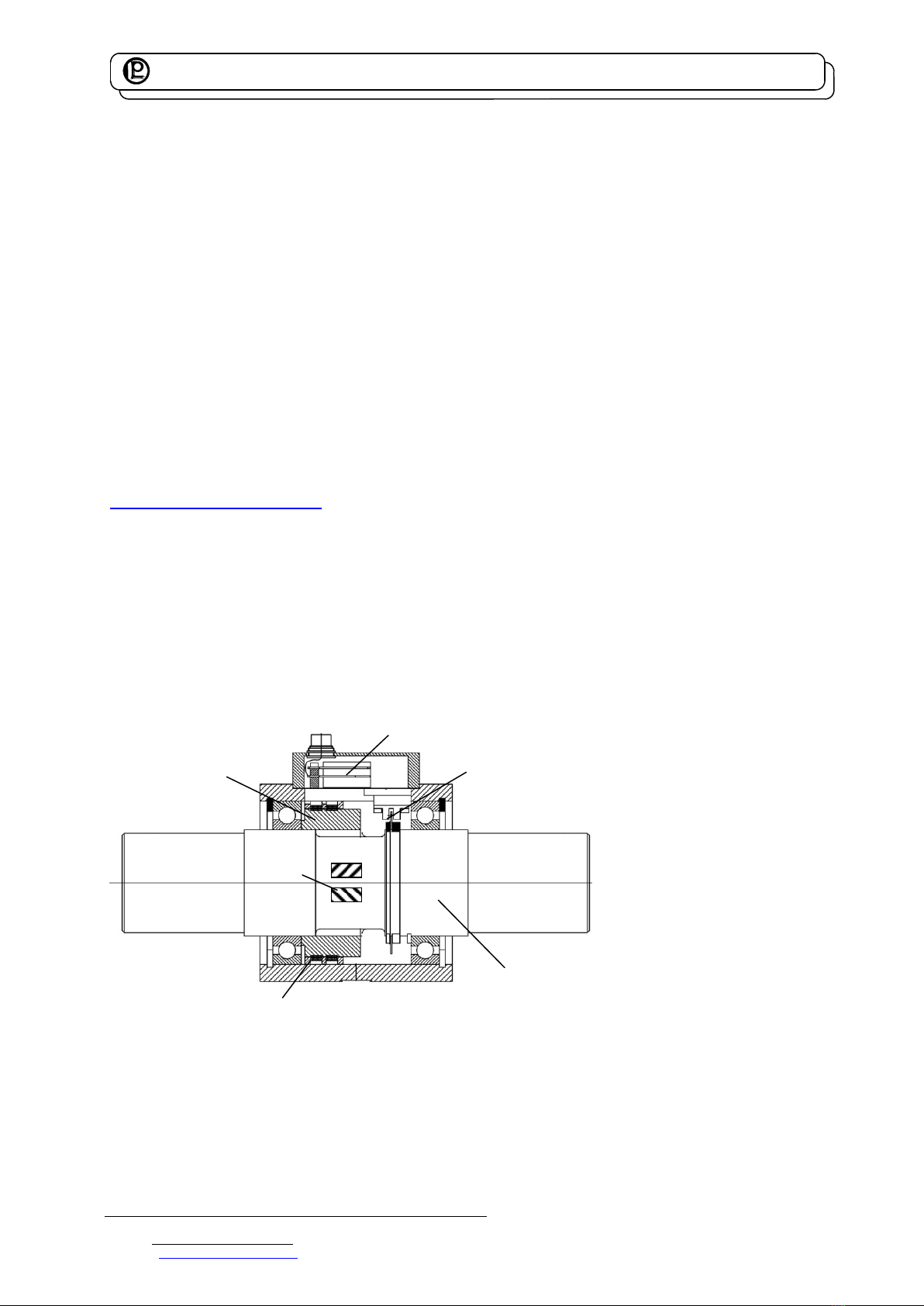
3.1 Mechanical Setup........................................................................................................................... 5
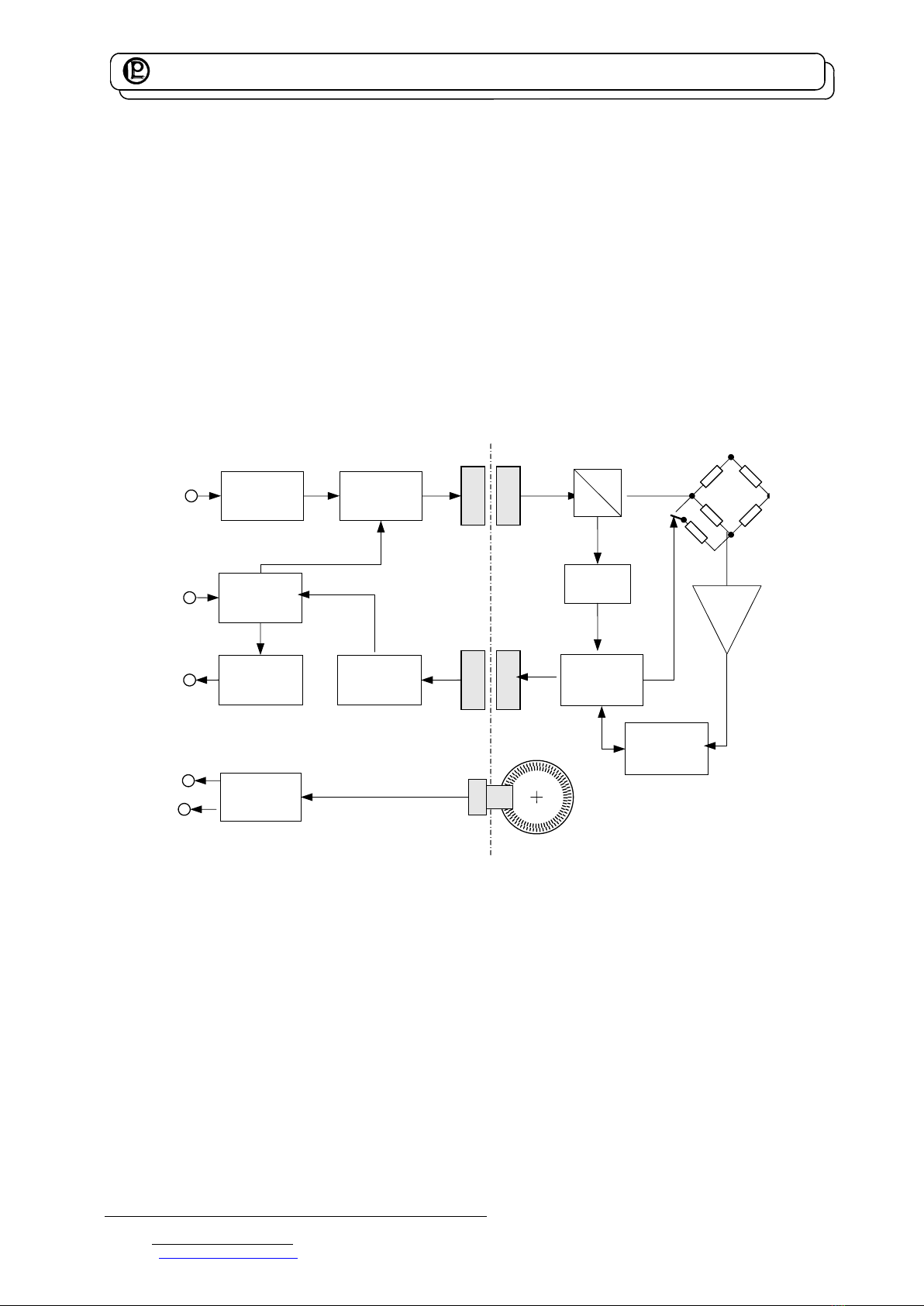
3.2 Electrical Setup .............................................................................................................................. 6
3.2.1 Sensors with Analog Output ................................................................................................... 6
4Mechanical Assembly............................................................................................................................ 7
5Electrical Connection............................................................................................................................. 8
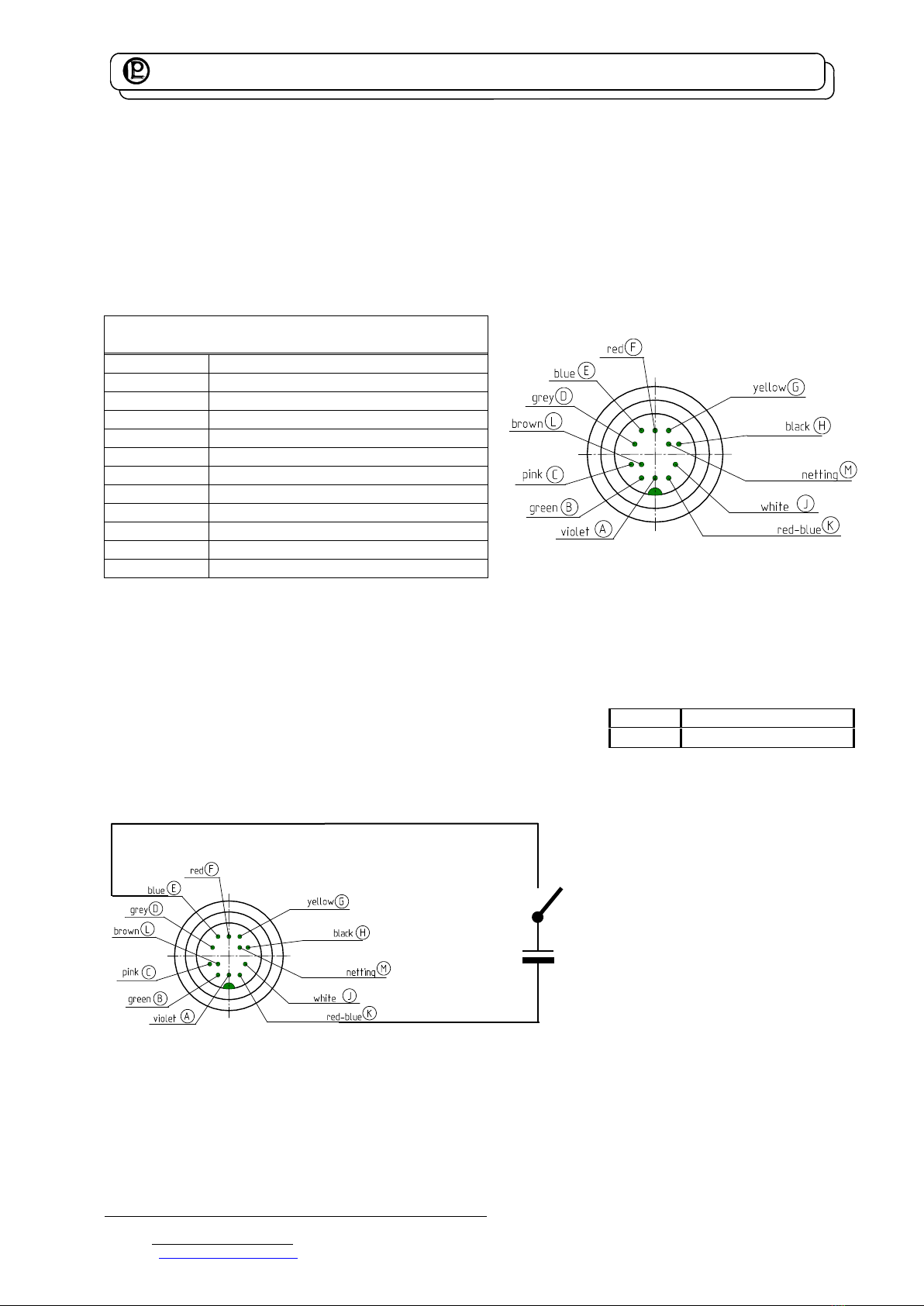
5.1 Pin Connection............................................................................................................................... 8
5.1.1 Standard Version .................................................................................................................... 8
5.2 Calibration Control ......................................................................................................................... 8
5.2.1 Calibration Control at Analog Output ...................................................................................... 8
5.3 Cable.............................................................................................................................................. 8
5.4 Shielding Connection ..................................................................................................................... 9
5.5 Running of Measuring Cables........................................................................................................ 9
5.6Angle (Option) ................................................................................................................................ 9
6Measuring.............................................................................................................................................. 9
6.1 Engaging ........................................................................................................................................ 9
6.2 Direction of Torque......................................................................................................................... 9
6.3 Static / Quasi-Static Torques ......................................................................................................... 9
6.4 Dynamic Torques ........................................................................................................................... 9
6.4.1 Natural Resonances ............................................................................................................. 10
6.5 Speed Limits ................................................................................................................................ 10
6.6 Disturbance Variables .................................................................................................................. 10
7Maintenance........................................................................................................................................ 10
7.1 Maintenance Schedule ................................................................................................................ 10
7.2 Trouble Shooting.......................................................................................................................... 11
8Decommission..................................................................................................................................... 11
9Transportation and Storage ................................................................................................................ 11
9.1 Transportation .............................................................................................................................. 11
9.2 Storage......................................................................................................................................... 11
10 Disposal ........................................................................................................................................... 12
11 Calibration........................................................................................................................................ 12
11.1 Proprietary Calibration.............................................................................................................. 12
11.2 DKD-Calibration........................................................................................................................ 12
11.3 Re-Calibration........................................................................................................................... 12
12 Data Sheet....................................................................................................................................... 12
13 Literature.......................................................................................................................................... 12