Magcoding Muse Manual for Beginner.
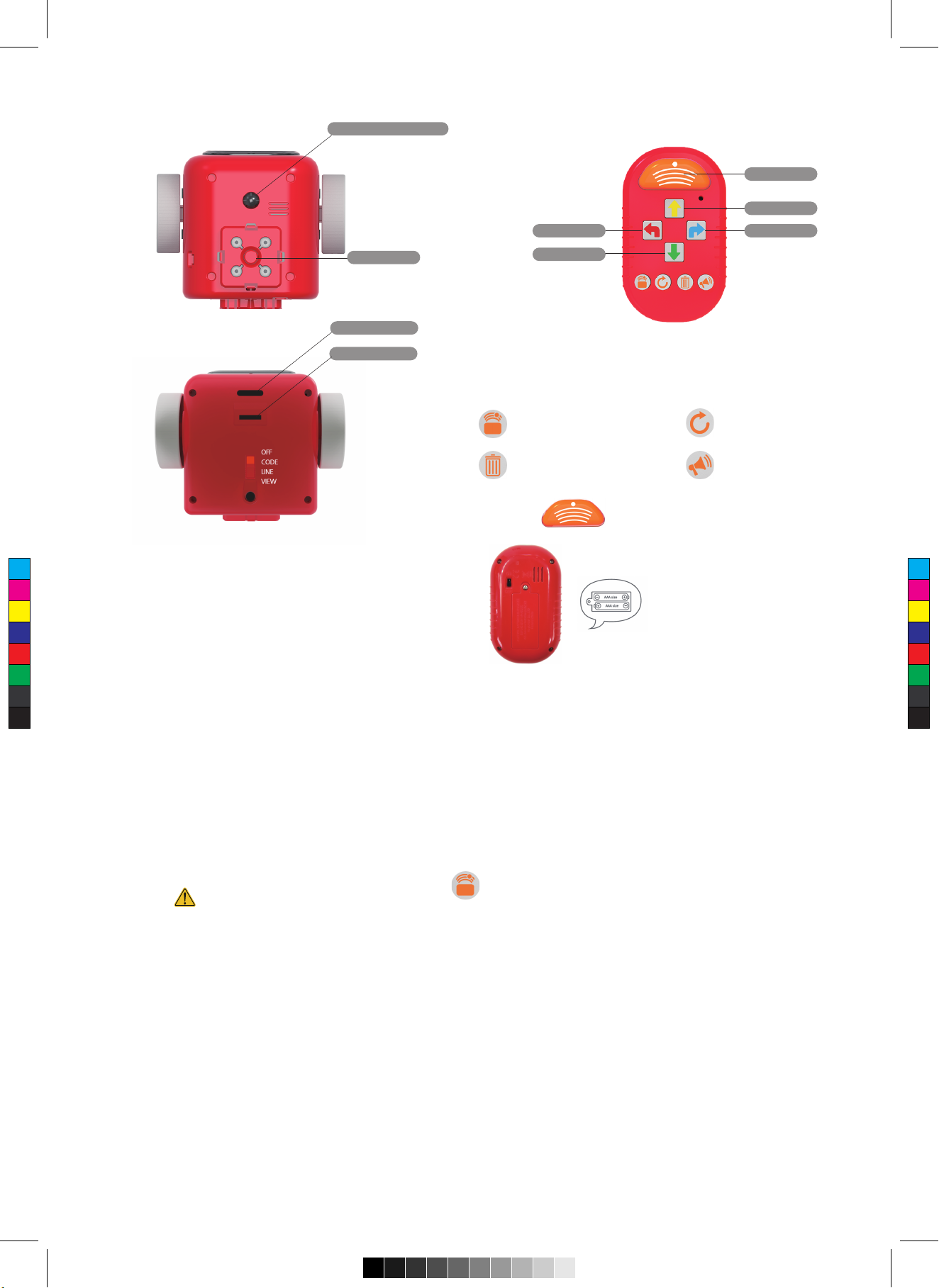
Sensor for Transmitter
Barcode Sensor
Sensor for Line
Forward
Enter
Turn Left Turn Right
Reverse
Stop / Enter
Swich
OFF
OFF Turn off the power. If you do not do anything after five minutes of
turning on your Magcoding, it goes into sleep mode.
Pressing the enter button again will start the coding activity again.
The magcoding will turn off after 5 minutes of inactivity.
Press the center button on the top of the robot to activate Magcoding again.
Please turn off the power when not in use.
CODE
Each arrow button represents a step in the code.
At the beginning of every step, the indicator at the top
of Magcoding lights up. When you complete the code
Magcoding stops and sounds. Using the remote control in
code mode for programming coding.
LINE
Press the middle button at the top of the Magcoding robot to begin following the line.
If the robot keeps spinning in place, put it closer to the line.
The robot will move automatically along the line. You must use the test line
If there is a dark color near the black line, the black line may not be detected well.
Follow the lines even if you draw with a thick pen on paper
VIEW
This mode is to read barcodes. You can read the barcode on the
barcode card by switching to VIEW mode.
Perform the coding command on the barcode.
1. Using the various barcode cards, place the barcode cards you
want to place on the floor in the desired order.
2. Change the mode to VIEW so that the card can be read in the direction
of the robot in front of the barcode card.
Position the robot. Then press the button on the top center of the robot.
3. The robot runs and reads the barcode card. It also executes the coding
entered into the barcode at the same time.
4. Play various games with various barcode cards.
Music composition, alphabet play, number play, animal play, etc. are available.
Remote
At the beginning of each step, four lights on the top of the robot appear.
When the code finishes, the robot stops moving and makes a sound.
Up to 10 programs can be coded and transmitted, Magcoding
Up to 80 levels of coding can be completed.
The first time you start the next sequence, you should delete all coding sequences.
Barcode cards are sold separatly.
Avoid obstacles-with infrared
sensor detect an obstacle
Recycle Bin - Initialize inputs
If you enter additional directions
without emptying the Trash,
Coding is added to the previous value.
Repeat Button- For direction
entered Value Code it repeatedly.
Sound Level- Adjust in 3 steps as
High, medium, small
Input- Send the coded value Press near to the device
Remove the batteries when not in use for
a long time. Please keep it at room temperature.
Wipe clean with a thin cloth
This set does not include AA batteries and all robots are capable of USB charging mode.
After a short period of inactivity, the remote transmitter automatically
goes into sleep mode to save power.
If you do not use it for a while, send the button and arrow several times at the same time.
The remote transmitter will then be reactivated.
A USB rechargeable battery is installed, allowing you to choose between AA batteries or
USB rechargeable batteries.
The charging cable is included in the set. Two charges cannot be used at the same time.
[Robot needs 3 AA size batteries]
The remote transmitter requires two AAA size batteries.
Use a screwdriver to loosen the screws and remove the compartments of the
robot and the remote transmitter.
Insert the batteries correctly and do not mix new and old batteries.
The robot will beep repeatedly when the battery runs out. When to replace a new battery
In code mode, each arrow button refers to each coding step.
Send the programmed coding sequence to Magcoding and it will go t
hrough all the steps the robot has done.
At the beginning of each coding, the light on the top of the robot comes out, a
nd when the coding is complete, the light flashes on the robot. .
Press the middle button at the top to pause the robot.
If previous coding remains on the transmitter, press the CLEAR button
Erase old coding and run new coding.
If the robot is not used for more than 5 minutes, the robot will go into sleep mode.
To wake up the robot you have to press the upper middle button.
Follow the instructions below to set up this feature.
1. Press 'Enter' and loop at the same time.
2. A red light appears in the top right corner of the remote transmitter.
3. It is set. Just like driving an R / C car, you can press the 4-way button to control the robot.
4. Press 'Enter' and the Loop button at the same time to turn off the setting.
Then RC mode will exit
1. Switch from OFF to CODE
2. Place the magcoding on a flat floor.
3. Code and transfer the pass step
4. Point the remote transmitter at Magcoding until you hear Magcoding’s sound,
press the orange Cast button.
5. Magcoding turns on and sounds. This is a step where the robot recognizes
the coding and It means to move forward..
[Object detection program]
Object detection is about learning logical thinking using ways to avoid obstacles
and find the right way.
Magcoding has an object detection sensor that allows robots to
move around and avoid obstacles.
You need to think logically and write code.
Example 1
1. Place an obstacle between 25 and 30 cm before Magcoding.
2. In CODE mode, first clear all previous coding.
3. Then make forward, forward, forward.
4. Now press the OBJECTION DETECTION button to enter the remote
transmitter in this state.
A red light appears. This means that the appeal detection feature is turned on.
5. Next, write the following code to turn the TURN RIGHT, FORWARD 1 STEP,
Enter the work your robot wants, such as TURN LEFT, FORWARD ONE STEP,
and FORWARD.
In other words, the robot sees the obstacles and programs the correct logical
coding so that the robot
Avoid obstacles and proceed.
Note: The detection sensor is located between the eyes, so the obstacle must be in
front of the robot. If no sequence or object is detected, the robot will stop and make
a sound. Use a large obstacle for easy detection. If Magcoding does not detect an
obstacle and does not work well and properly, check the following: Removing
the robotic arm, which makes detection better.
The object must be at least 5 cm high and 3 cm wide. If object detection is on,
the robot will not move until the object is removed. Stay in place and horn.
Therefore, in order for the robot to move around, you must enter coding.
C
M
Y
CM
MY
CY
CMY
K



















