(1/n)
LEN080334
CONTENTS
1. General Description............................................................................................................................... 2
2. Specification .......................................................................................................................................... 2
3. Configuration Conditions of CC-Link System ........................................................................................ 3
4. Parameter Settings................................................................................................................................ 4
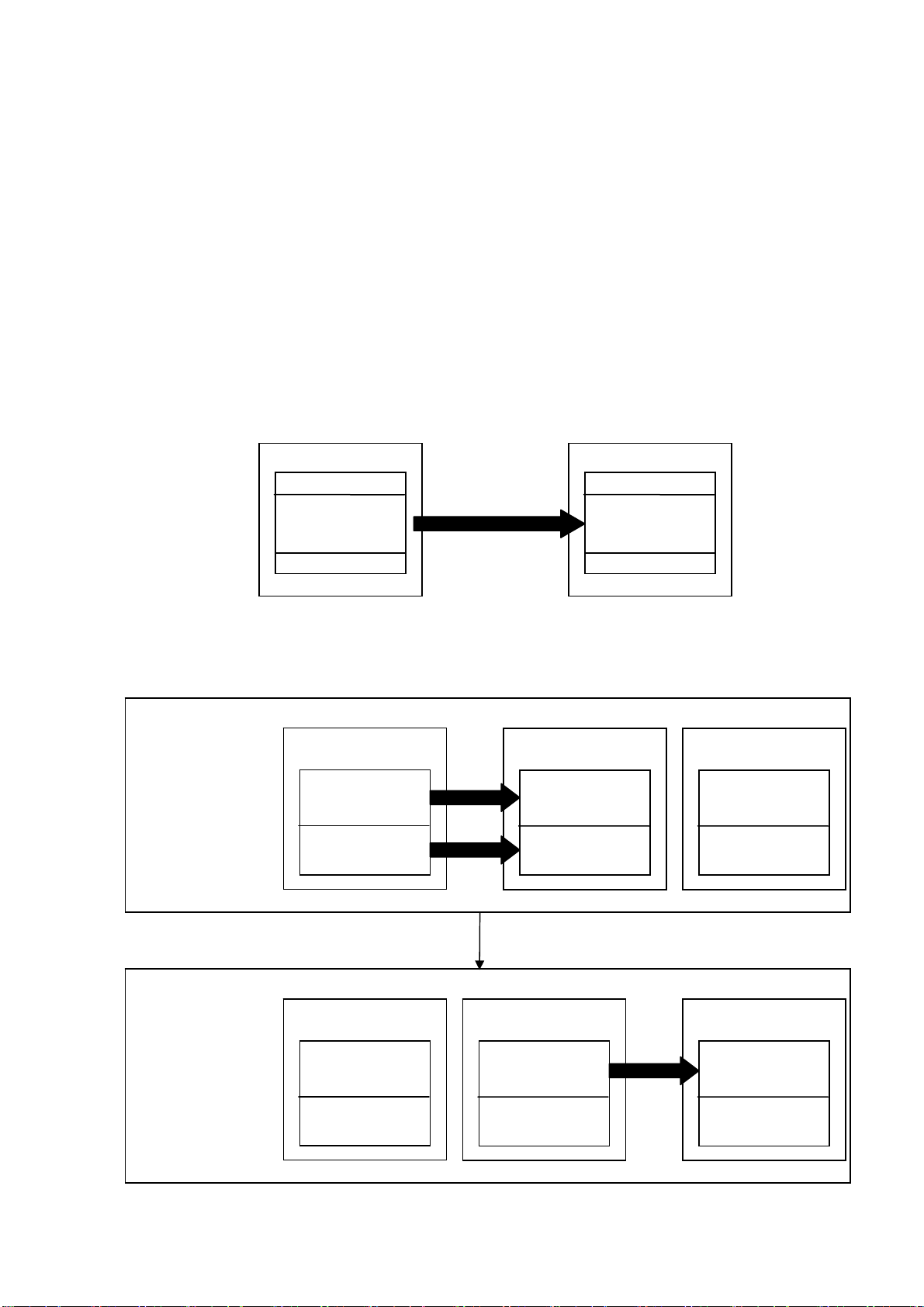
4.1 Procedure from Parameter Settings to Data Link Startup .............................................................. 4
4.1.1 CPU Parameter Area and Master Module Parameter Memory ............................................... 4
4.1.2 Procedure for Parameter Settings to Data Link Startup with GX Developer............................ 4
4.2 Parameter Setting Items ................................................................................................................ 5
4.3 Example of Parameter Settings with GX Developer....................................................................... 6
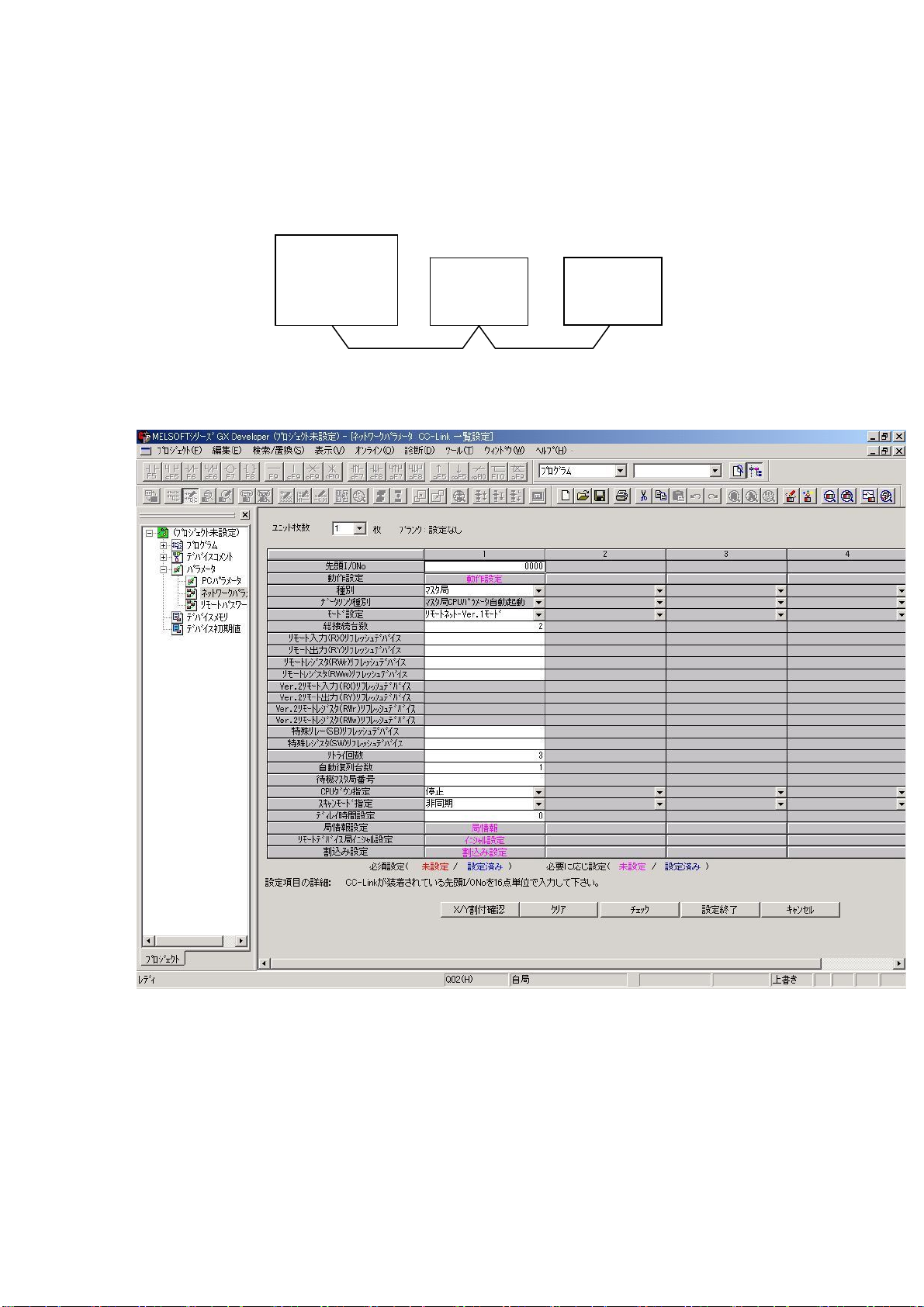
4.3.1 Master Station Network Parameter Settings ........................................................................... 6
4.3.2 Master Station Automatic Refresh Parameter Settings ......................................................... 10
5. Communication Between the Master Station and ME96NSR.............................................................. 12
5.1 Communication Guideline ............................................................................................................ 12
5.2 Initial Communication................................................................................................................... 13
5.3 Normal Communication................................................................................................................ 14
5.4 Error Communication ................................................................................................................... 14
6. Remote I/O and Remote Register ....................................................................................................... 15
6.1 Remote Input RX, Remote Output RY ......................................................................................... 15
6.1.1 Remote input RX................................................................................................................... 15
6.1.2 Remote Output RY................................................................................................................ 16
6.2 Remote Register (RWr, RWw)...................................................................................................... 17
6.2.1 Supported Command............................................................................................................ 17
6.2.2 Details of Commands............................................................................................................ 18
6.2.3 About Error Occurrence ........................................................................................................ 34
7. Abbreviations and Special Terms ........................................................................................................ 35
8. Program Example................................................................................................................................ 36
8.1 Program Content.......................................................................................................................... 36
8.2 System Configuration................................................................................................................... 36
8.3 Device Allocation.......................................................................................................................... 37
8.4 Parameter Settings ...................................................................................................................... 38
8.4.1 Network Parameter Settings and Auto Refresh Parameter Settings ..................................... 38
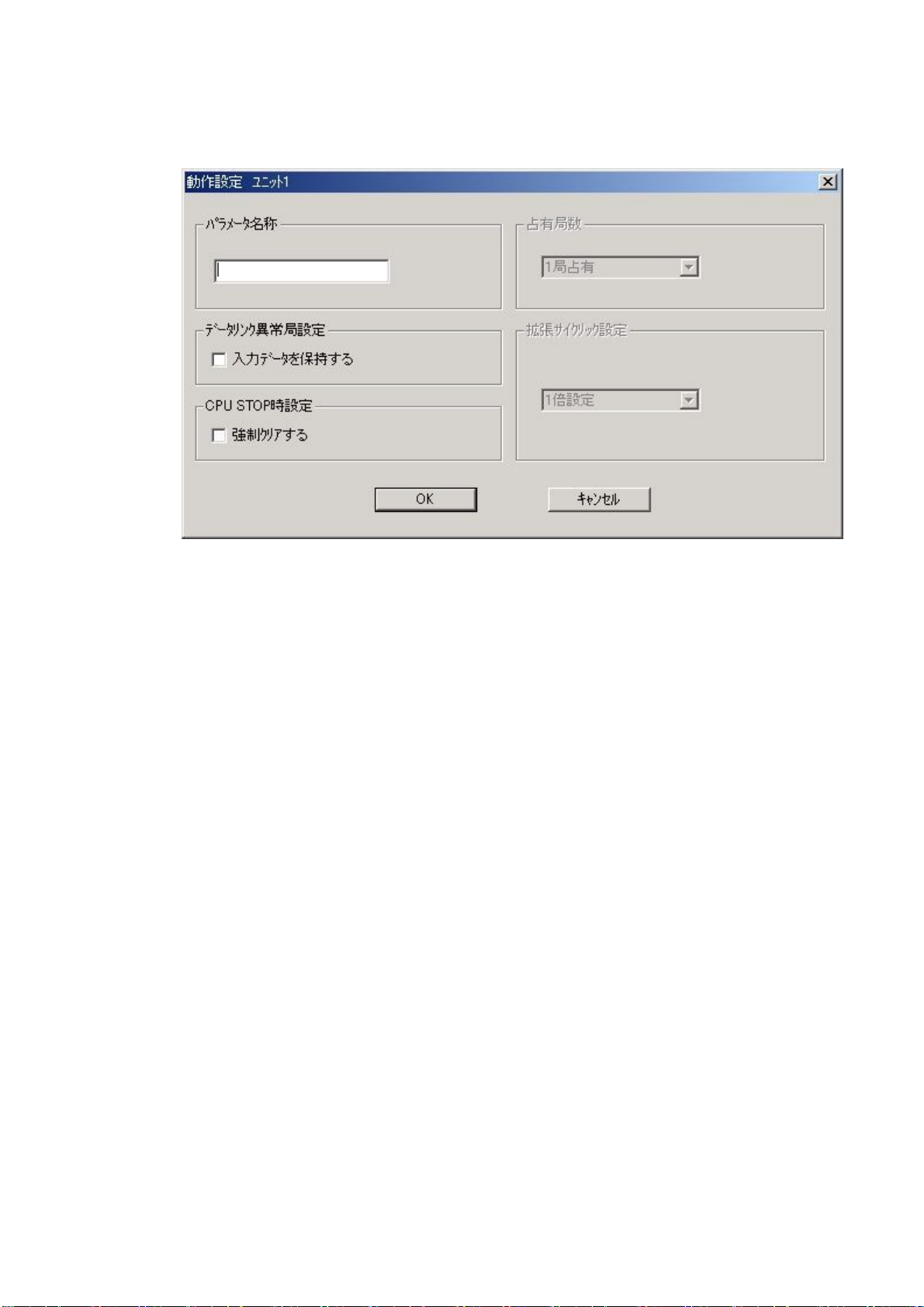
8.4.2 Operational Settings ............................................................................................................. 39
8.4.3 Station Information Settings .................................................................................................. 39
8.5 Program Example ........................................................................................................................ 40
9. Test Function Mode............................................................................................................................. 49
9.1 How to Test .................................................................................................................................. 49
9.2 Reply Data ................................................................................................................................... 49