2
HXP100-MECA & HXP100HA-MECA 6-Axis-Parallel Ki ematic Positio i g Systems
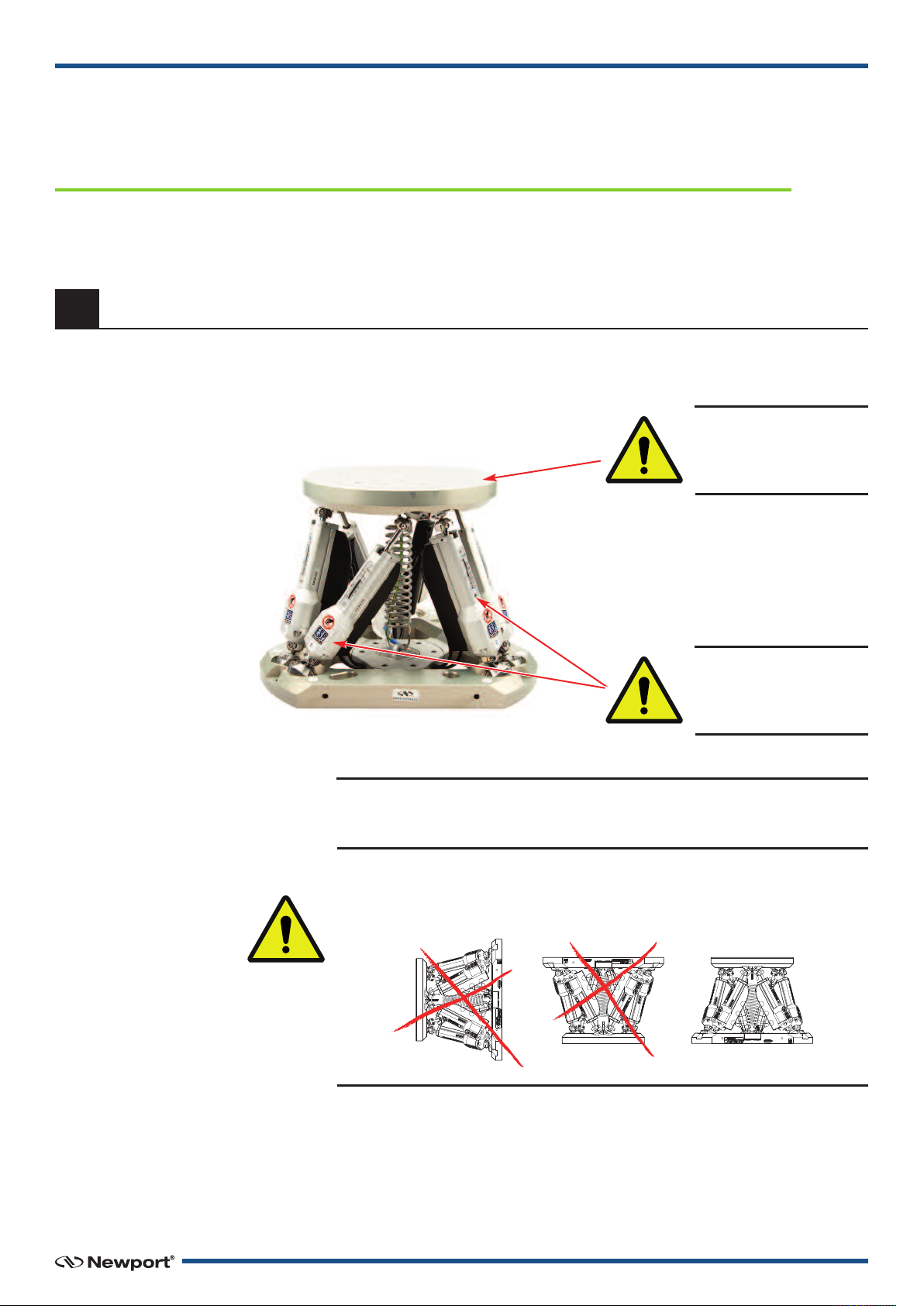
2.0 —Description
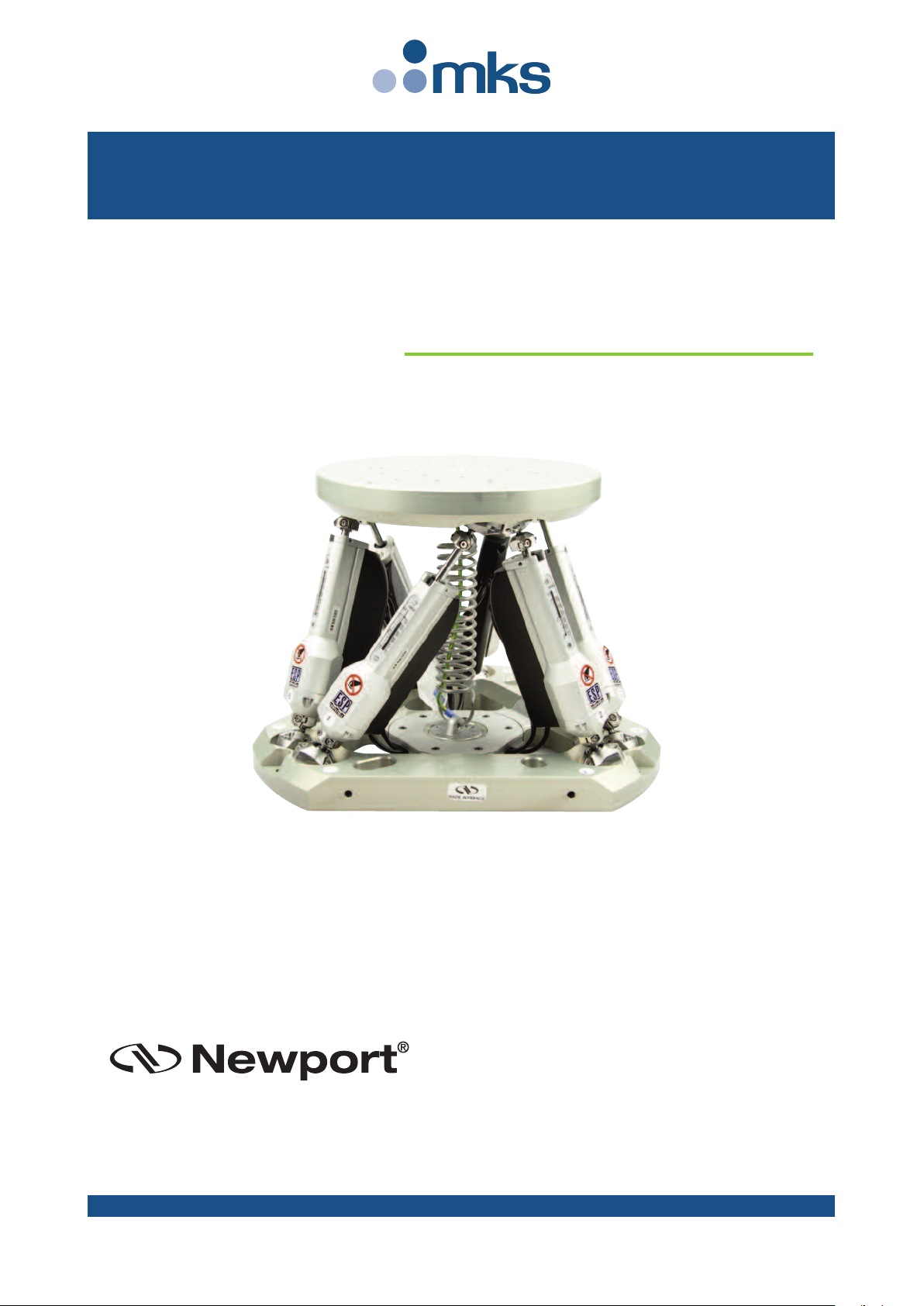
The HX 100-MECA 6-Axis Hexapod is a parallel kinematic motion device
that provides six degrees of freedom: X, Y, Z, pitch, roll, and yaw. The
HX 100-MECA has long travel capability and is an effective solution to
complex motion applications that demand high load capacity and
accuracy in up to six independent axes. Contrary to the image of being
complex and highly priced, the HX 100-MECA hexapod is not only
affordable but extremely easy to use. The HX 100-MECA design also
includes two programmable pivot points, enabling more flexibility to align
a sample at a particular point or points of that sample. The HX 100-MECA
Series also takes advantage of the low-runout, Right ath™ trajectory
capability. Available in the standard performance, higher precision and
vacuum versions. Order with the corresponding HX 100-ELEC controller.
To further ensure positioning performance, the High Accuracy (HA)
HX 100HA-MECA is available with guaranteed accuracy values. This
enables the use of a Newport Hexapod in positioning applications, where
position accuracy is required. In addition to accuracy along an axis, the
itch and Yaw deviations during axial motion are also monitored and
guaranteed. When the HA Hexapod is used with Right ath™, this
combination achieves positioning performance close to standard Newport
stages.
The HX 100-ELEC-D and HX 100HA-ELEC-D provide advanced features
including instrument grade I/O's, hardware based input triggers, event
triggers, high-speed on-the-fly data acquisition, fast TC /I
communication, and integrated TCL programming language for on-board
processes. All these features improve accuracy and throughput, making
the programmer’s life much easier.
A common requirement for many Hexapod motion applications is a virtual
pivot point, allowing the user to freely choose the point in space that is a
pivot point for all rotations. The Newport Hexapod can not only relocate
the pivot point, but through our advanced technology, the entire
coordinate system can be relocated. In addition, two user-definable
coordinate systems are provided, called tool (moves with the Hexapod)
and work (stationary coordinate systems). Incremental displacements are
possible in either one of these systems in user-friendly Cartesian
coordinates, and positions can be easily calculated from one system to the
other by a function call, without the need for complex external coordinate
transformations.
Absolute moves and positions a e
defined in the wo k coo dinate
system. Inc emental moves can
be done in the tool o in the wo k
coo dinate systems.
WORLD
WORK
CARRIAGE
TOOL
BASEBASEBASE
As a standa d featu e, the HXP100-ELEC-D
and HXP100HA-ELEC-D cont olle s allow
the use to choose a vi tual pivot point in
space fo all otations.
A698J0 - EDH0239En1070 - 12/19