Page
Overview
9
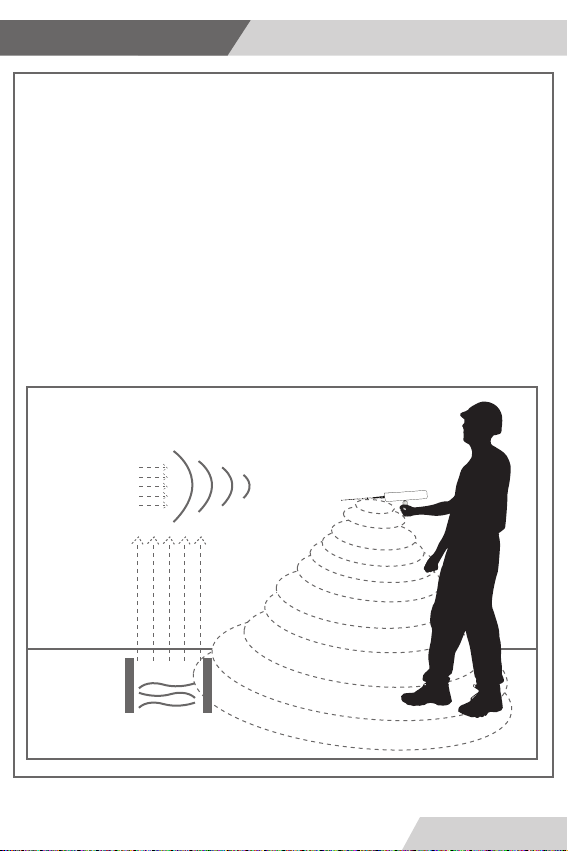
This electronic device works on water finder technology transmitter and receiver. It
sends waves and receives at the same time, the device turn research and
detection of groundwater by revealing waters partial frequency, and energy
electro-static (static electricity) around in the water , make up groundwater stored
and surrounding soil and are gaining in the underground streams and areas of
static electricity gained from the soil through the soil influenced by different
currents such as power stations, broadcasting stations, radio, satellite, lightning,
and a lot of generated objects of electric power , energy static.
This device, however, depends on detection of groundwater in the ground through
the influence of waves emerging from the device by electrostatic fields formed on
the water as a result he was underground and water frequency at the same time.
Device waves working device waves to inflate the size of these fields and
escalation to the surface of the soil, which helps the device to locate the water
from long distance, the device receives a signal amplification and heading toward
the water site directly and precise destination.
Soil
Water