Netzer VLX Series User manual

VLX-170
PRODUCT GUIDE
Hollow Shaft
Kit Encoder
Absolute
Rotary Encoder


PRODUCT GUIDE
VLX-170
Hollow Shaft
Kit Encoder
Absolute
Rotary Encoder
Table of Contents
1. VLX Encoders Introduction...............................................................................................................................................4
2. Technical Specifications.....................................................................................................................................................5
3. Ordering Code.......................................................................................................................................................................6
4. Mechanical Drawings..........................................................................................................................................................7
5. Mechanical Interface Control Drawing.........................................................................................................................8
6. Storage and Handling.........................................................................................................................................................9
7. ESD Protection.......................................................................................................................................................................9
8. Product Overview ......................................................................................................................................................... 9-10
8.1 Overview........................................................................................................................................................................................................9
8.2 Unpacking - Standard order ..........................................................................................................................................................10
8.3 Installation flow chart .........................................................................................................................................................................10
9. Electric Encoder Software Installation.......................................................................................................................11
9.1 Minimum requirements ....................................................................................................................................................................11
9.2 Installing the software........................................................................................................................................................................11
10. Mechanical Mounting................................................................................................................................................11-12
10.1 Encoder mounting - End-of-Shaft Installation ....................................................................................................................11
11. Electrical Connection.................................................................................................................................................13-16
11.1 Absolute position over SSi or BiSS-C .........................................................................................................................................13
11.2 Digital SSi Interface...............................................................................................................................................................................14
11.3 Digital BiSS-C Interface.......................................................................................................................................................................15
11.4 Setup mode over NCP (Netzer Communication Protocol)..........................................................................................16
11.5 Electrical connection and grounding.......................................................................................................................................16
12. Signal Verification........................................................................................................................................................17-19
12.1 Starting the Encoder Explorer........................................................................................................................................................17
12.2 Signal verification process................................................................................................................................................................18
13. Calibration......................................................................................................................................................................20-29
13.1 Auto-calibration......................................................................................................................................................................................20
13.2 Manual calibration ................................................................................................................................................................................23
13.3 Setting the encoder zero-position.............................................................................................................................................. 27
13.4 Jitter test......................................................................................................................................................................................................29
14. Operational Mode.............................................................................................................................................................29
9.1 SSi / BiSS ......................................................................................................................................................................................................29

4Product GuideVLX-170-PG-V02
1. VLX Encoders Introduction
Designed to meet the requirements of the most demanding applications
The VLX series of Electric Encoders™ are a line of encoders designed for high accuracy motion control for
industrial, automation and robotic applications.
These encoders are based on capacitive technology which have been developed and improved for over 20
years by Netzer Precision Position Sensors.
The VLX encoders are characterized by the following features that sets them apart from
other similar encoders:
●Low profile (<10 mm)
●Hollow shaft (Stator / Rotor)
●No bearings or other contact elements
●High resolution and excellent precision
●Immunity to magnetic fields
●High tolerance to temperature extremes, shock, moisture, EMI, RFI
●Very low weight
●Holistic signal generation and sensing
●Digital interfaces for absolute position
The holistic structure of the VLX Electric Encoder™ makes it unique. Its output reading is the averaged outcome
of the entire circumference area of the rotor. This inherent design characteristic provides the VLX encoder with
outstanding precision as well as a tolerant mechanical mounting.
The absence of components such as ball bearings, flexible couplers, glass discs, light sources & detectors, along
with very low power consumption, enables the VLX encoders to deliver virtually failure-free performance.
VLX-247
VLX-140
VLX-80
VLX-60
VLX-170
VLX-100
PRODUCT GUIDE
5
Netzer Precision Position Sensors
VLX-170
Hollow Shaft
Kit Encoder
Absolute
Rotary Encoder
VLX-170-PG-V02
2. Technical Specications
General
Angular resolution 19-21 bit
Nominal position accuracy
±0.010° / ±0.006°
Maximum operational speed 2,000 rpm
Measurement range Single turn, unlimited
Built In Test BIT Optional
Rotation direction Adjustable CW/CCW*
* Default same direction from bottom side of the encoder
Mechanical
Allowable mounting eccentricity ±0.1 mm
Allowable axial mounting tolerance
±0.3 mm
Rotor inertia 205,330 gr · mm2
Total weight 106 gr
Outer Ø / Inner Ø / Height 170 / 110 / 10 mm
Material (stator / rotor) PCB (FR4)
Nominal air gap (stator, rotor) 1 mm
Electrical
Supply voltage 5V ± 5%
Current consumption ~90 mA
Interconnection Connector: DF13A-10P -1.25H
Communication SSi, BiSS-C
Output code Binary
Serial output Dierential RS-422
Clock frequency 0.1- 5.0 MHz
Position update rate 35 kHz (Optional - up to 375 kHz)
Environmental
EMC IEC 6100-6-2, IEC 6100-6-4
Operating temperature -40°C to +85°C
Storage temperature -40°C to +85°C
Relative humidity 98% Non condensing
Shock endurance / functional 100g 6msec saw-tooth per IEC 60068-2-27:2009
Vibration functional 20g @ 10 to 2000 Hz sweep per IEC 60068-2-6
Protection IP 40

6Product GuideVLX-170-PG-V02
3. Ordering Code
EA Extended Accuracy
nnn Custom
Interconnection
HHorizontal (Connector)
VVertical (Connector)
CConnector
VLX -170 -S G -C H -nnn
VLX Product Line
Outer Diameter
Output
SSSi
IBiSS
Resolution
Code Bit CPR
H19 524,288
I20 1,048,578
J21* 2,097,156
*SSi only
PRODUCT GUIDE
7
Netzer Precision Position Sensors
VLX-170
Hollow Shaft
Kit Encoder
Absolute
Rotary Encoder
VLX-170-PG-V02
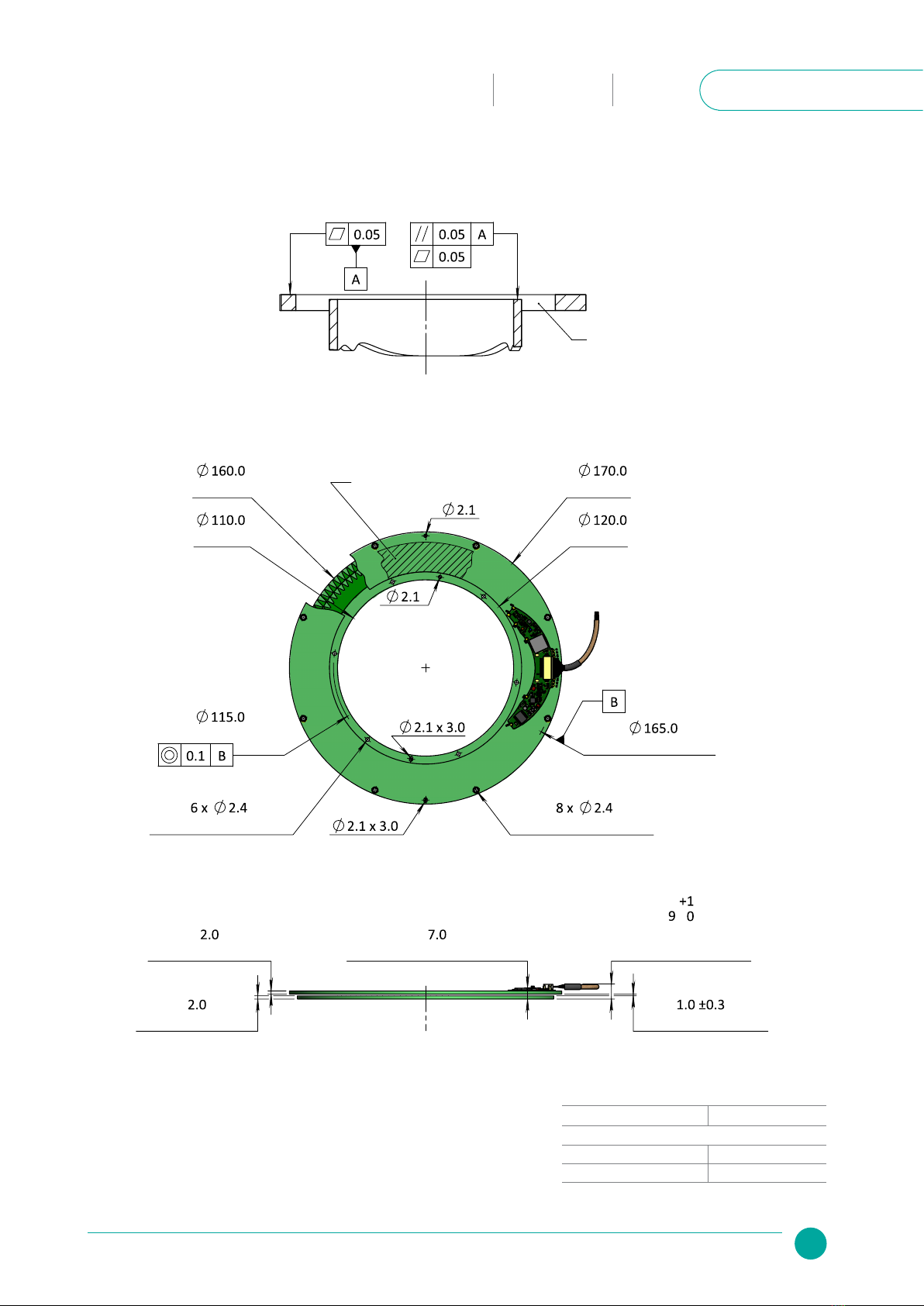
4. Mechanical Drawings
Unless otherwise specied
Dimensions are in: mm Surface nish: N6
Linear tolerances
0.5-4.9: ±0.05 mm 5-30: ±0.1 mm
31-120: ±0.15 mm 121-400: ±0.2 mm
rotor ID
rotor OD
stator ID
stator OD
rotor mounting PCD
stator mounting PCD
The functional zone is
within the ring between
radii 60 and 80 on both
the stator and rotor
encoder height include stamp
encoder height include
canle and connector
Avoid presence of any body
made of conductive material
belows the rotor’s lower surface
within 1 mm under the rotor and
within the functional zone -
to prevent parasitic capacitance
for M2 DIN 912 screwsfor M2 DIN 912 screws
stator PCB thickness
rotor PCB thickness air gap between PCBs

8Product GuideVLX-170-PG-V02
5. Mechanical Interface Control Drawing
SSi / BiSS Remarks
CB-00088-250 AWG30, 250 mm
CB-00088-500 AWG30, 500 mm
Accessories cables (optional)
horizontal connector
Customer interface, example, exploded view
vertical connector
Mounting screws
(not included)
Encoder’s stator
Encoder’s rotor
Customer’s base
Mounting dowel M2 pins
Customer’s shaft
PRODUCT GUIDE
9
Netzer Precision Position Sensors
VLX-170
Hollow Shaft
Kit Encoder
Absolute
Rotary Encoder
VLX-170-PG-V02
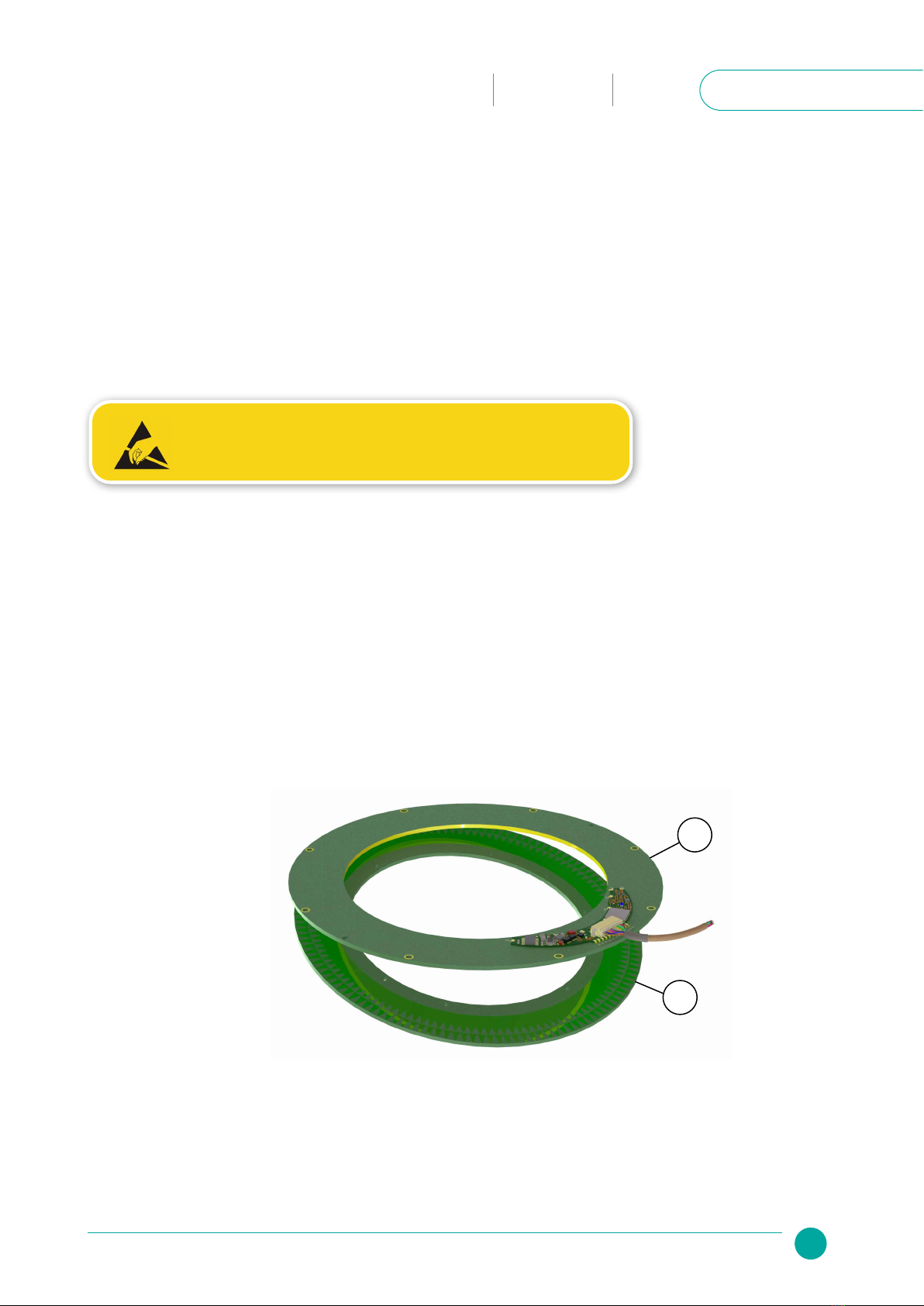
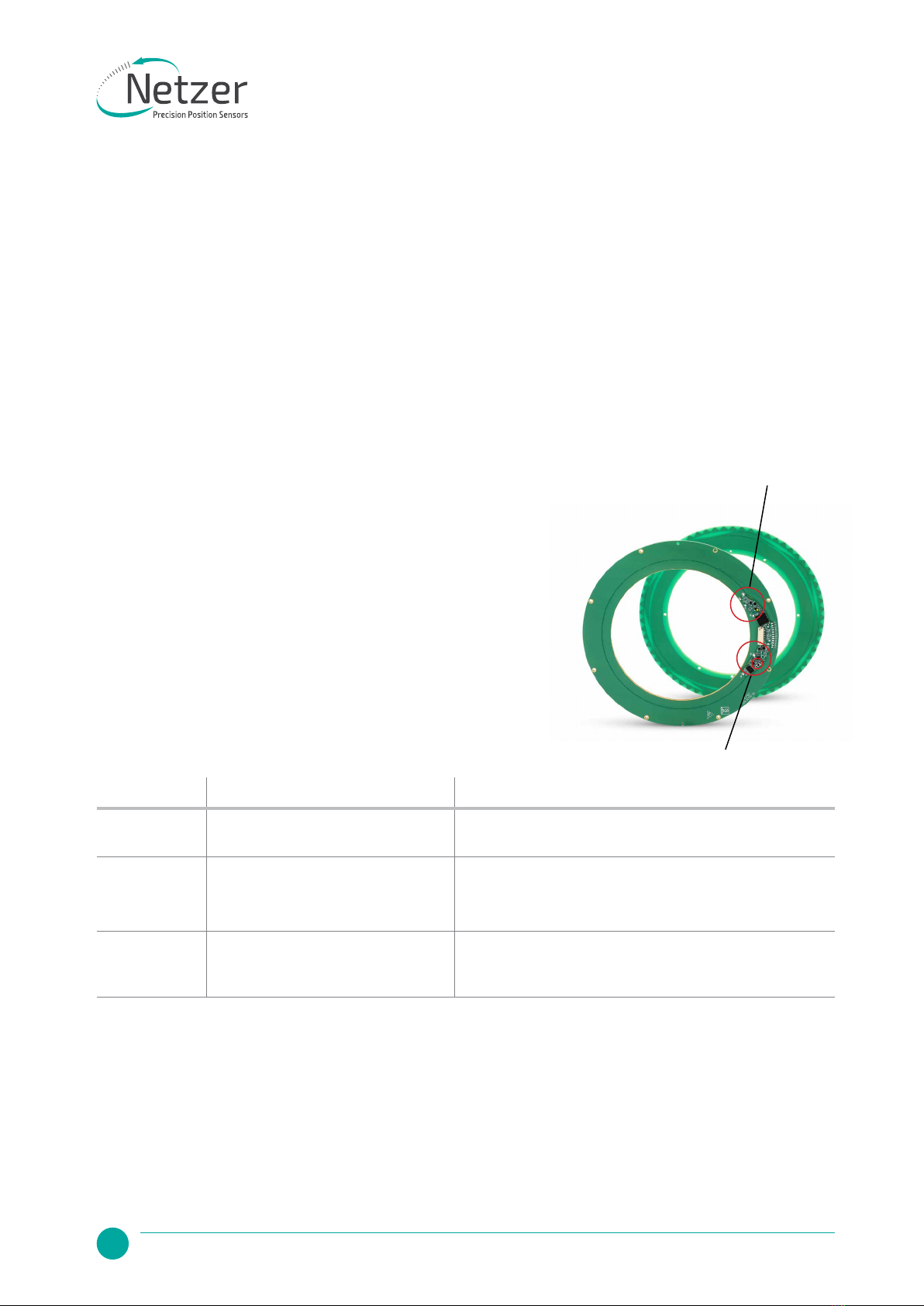
8. Product Overview
8.1 Overview
The VLX-170 absolute position Electric Encoder™ is a rotary position sensor developed for demanding
applications. Currently it performs in a broad range of robotic ,automation and industrial applications.
The Electric Encoder™ non-contact technology provides accurate position measurement through the
modulation of an electric field.
The VLX-170 Electric Encoder™ is a kit-encoder, i.e., its rotor and stator are separate.
7. ESD Protection
As usual for electronic circuits, during product handling do not touch electronic circuits, wires, connectors or
sensors without suitable ESD protection. The integrator / operator shall use ESD equipment to avoid the risk
of circuit damage.
6. Storage and Handling
Storage temperature: -40°C to +85 °C
Humidity: Up to 98% non-condensing
ATTENTION OBSERVE PRECAUTIONS FOR HANDLING
ELECTROSTATIC SENSITIVE DEVICES
(1) Encoder stator
(2) Encoder rotor
1
2

10 Product GuideVLX-170-PG-V02
8.2 Unpacking - standard order
The package of the standard VLX-170 contains the encoder Stator & Rotor
.
Optional accessories:
(1)
CB-00088-250, 250mm connection harness
.
(2)
CB-00088-500, 500mm connection harness.
(3) CNV-00003, RS-422 to USB converter (with USB internal 5V power supply path).
(4) NanoMIC-KIT-01, RS-422 to USB converter. Setup & Operational modes via SSi /BiSS interface.
(5) DKIT-VLX-170-SG-CH, Mounted SSi encoder on rotary jig, RS-422 to USB converter and cables.
(6)
DKIT-VLX-170-IG-CH
, Mounted BiSS encoder on rotary jig, RS-422 to USB converter and cables.
8.3 Installation ow chart
Calibration Mounting
correction
YES NO
Mechanical
mounting
Signal
verication
Electric Encoder
Software
installation on PC
Electrical
connection

PRODUCT GUIDE
11
Netzer Precision Position Sensors
VLX-170
Hollow Shaft
Kit Encoder
Absolute
Rotary Encoder
VLX-170-PG-V02
9. Electric Encoder Software Installation
The Electric Encoder Explorer (EEE) software:
●Verifies correct mounting for an adequate signal amplitude
●Calibration of offsets
●General set up and signal analysis
This section describes the steps associated with installing the EEE software application.
9.1 Minimum requirements
●Operating system: MS windows 7/ 10, (32 / 64 bit)
●Memory: 4MB minimum
●Communication ports: USB 2
●Windows .NET Framework, V4 minimum
9.2 Installing the software
●Run the Electric Encoder™ Explorer file found on Netzer website: Encoder Explorer Software Tools
●After the installation you will see Electric Encoder Explorer software icon on the computer desktop.
●Click on the Electric Encoder Explorer software icon to start.
10. Mechanical Mounting
10.1 Encoder mounting - End-of-Shaft Installation
Typical encoder installation uses
●Mounting screws Socket Head Cup Screw 8xM2, 4 each per stator & rotor.
●Mounting dowel pins 4xØ2, 2 each per stator & rotor (not included with the encoder).
12 Product GuideVLX-170-PG-V02
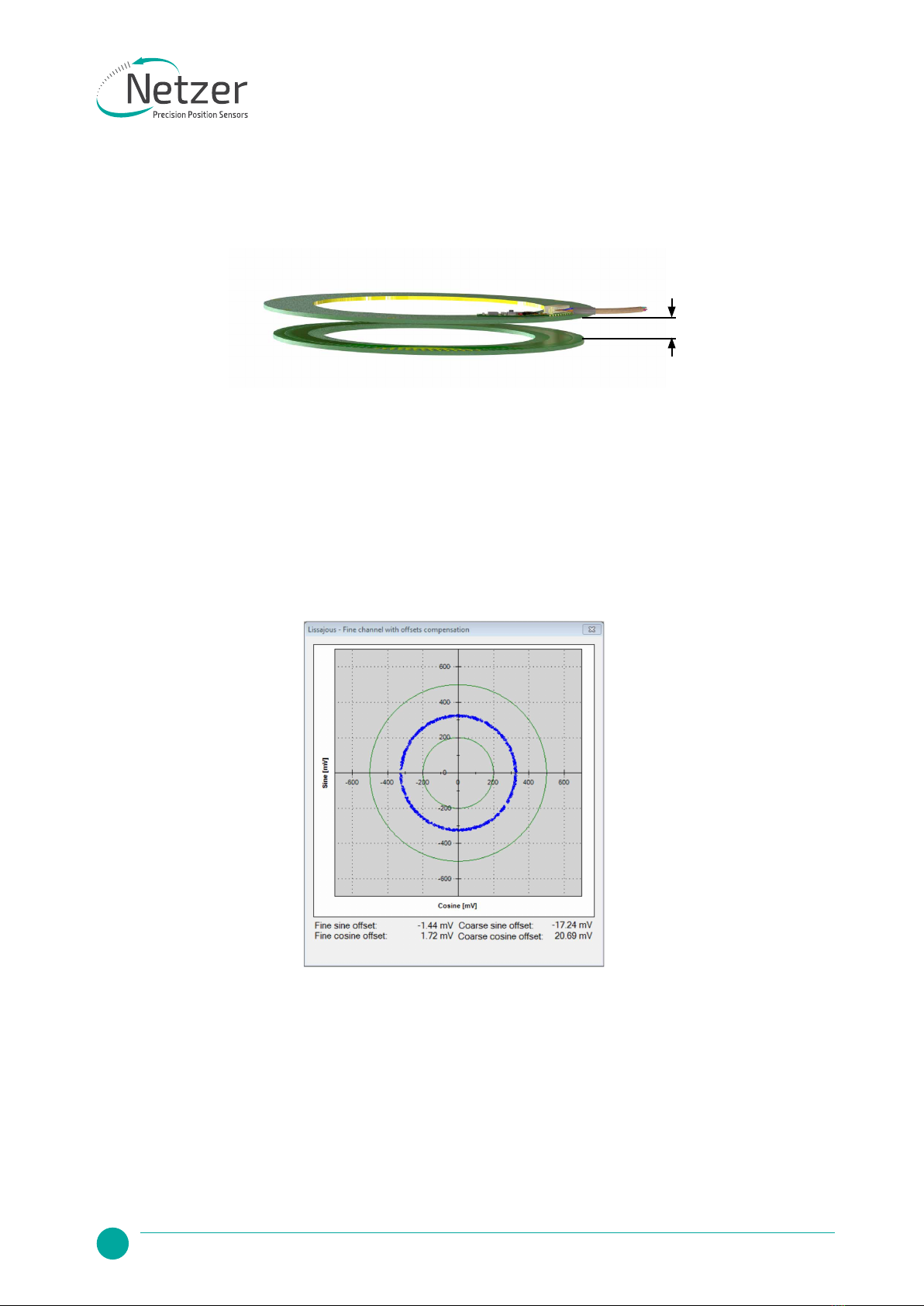
Encoder stator / Rotor relative position
For proper performance the air gap should be 1 mm ±0.3 mm
Note: for more information please read section 7
In an optimal mounting, the signal amplitude values generated by the encoder, would be in the middle of
the range of the signal plot shown in the Encoder Explorer software (see plot below). This may vary according
to the encoder type.
Verify proper rotor mounting with the Encoder Explorer tools “Signal analyzer” or“Signal verification process.”
1 mm
PRODUCT GUIDE
13
Netzer Precision Position Sensors
VLX-170
Hollow Shaft
Kit Encoder
Absolute
Rotary Encoder
VLX-170-PG-V02
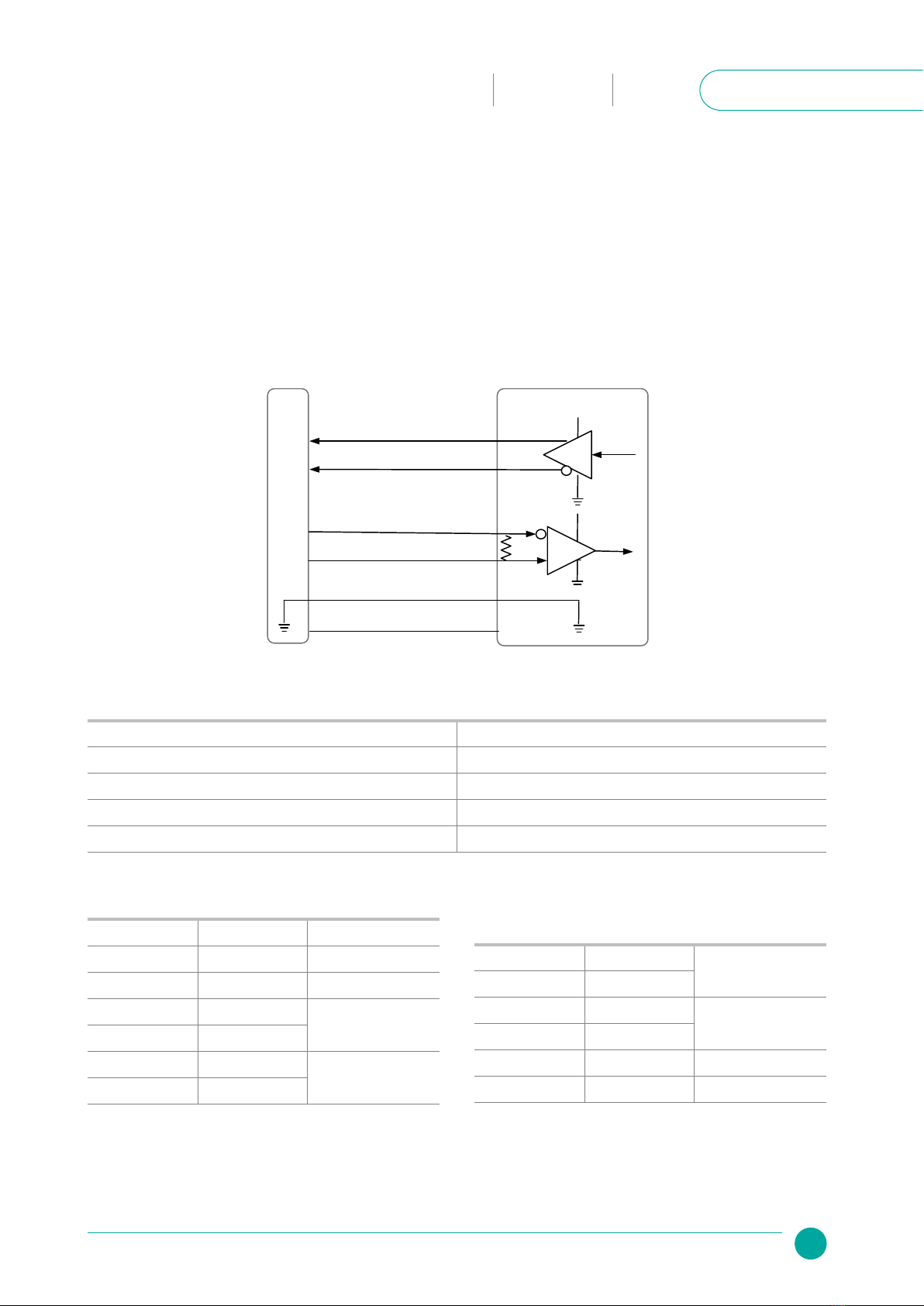
11. Electrical Connection
This chapter reviews the steps required to electrically connect the encoder with digital interface (SSi or BiSS-C).
Connecting the encoder
The encoder has two operational modes:
11.1 Absolute position over SSi or BiSS-C
This is the power-up default mode
5V
Host System
CLK / NCP RX [+]
CLK / NCP RX [-]
5V
5V
120 Ω
(red)
(yellow)
(green)
(blue)
(gray)
(black)
Electric Encoder™
Gnd
DATA / NCP TX [-]
DATA / NCP TX [+]
Accessory cable (optional)
SSi / BiSS interface wires color code
Clock + Grey Clock
Clock - Blue
Data - Yellow Data
Data + Green
GND Black Ground
+5V Red Power supply
SSi / BiSS output signal parameters
Output code Binary
Serial output Dierential RS-422
Clock Dierential RS-422
Clock frequency 0.1÷ 5.0 MHz
Position update rate 35 kHz (Optional - up to 375 kHz)
Connector Pinout
Pin No. SSi / BiSS Remarks
8 +5V P.S.
7 GND GND / RTN
6 Data + Data / NCP TX
5 Data -
4 Clock - Clock / NCP RX
3 Clock +
14 Product GuideVLX-170-PG-V02
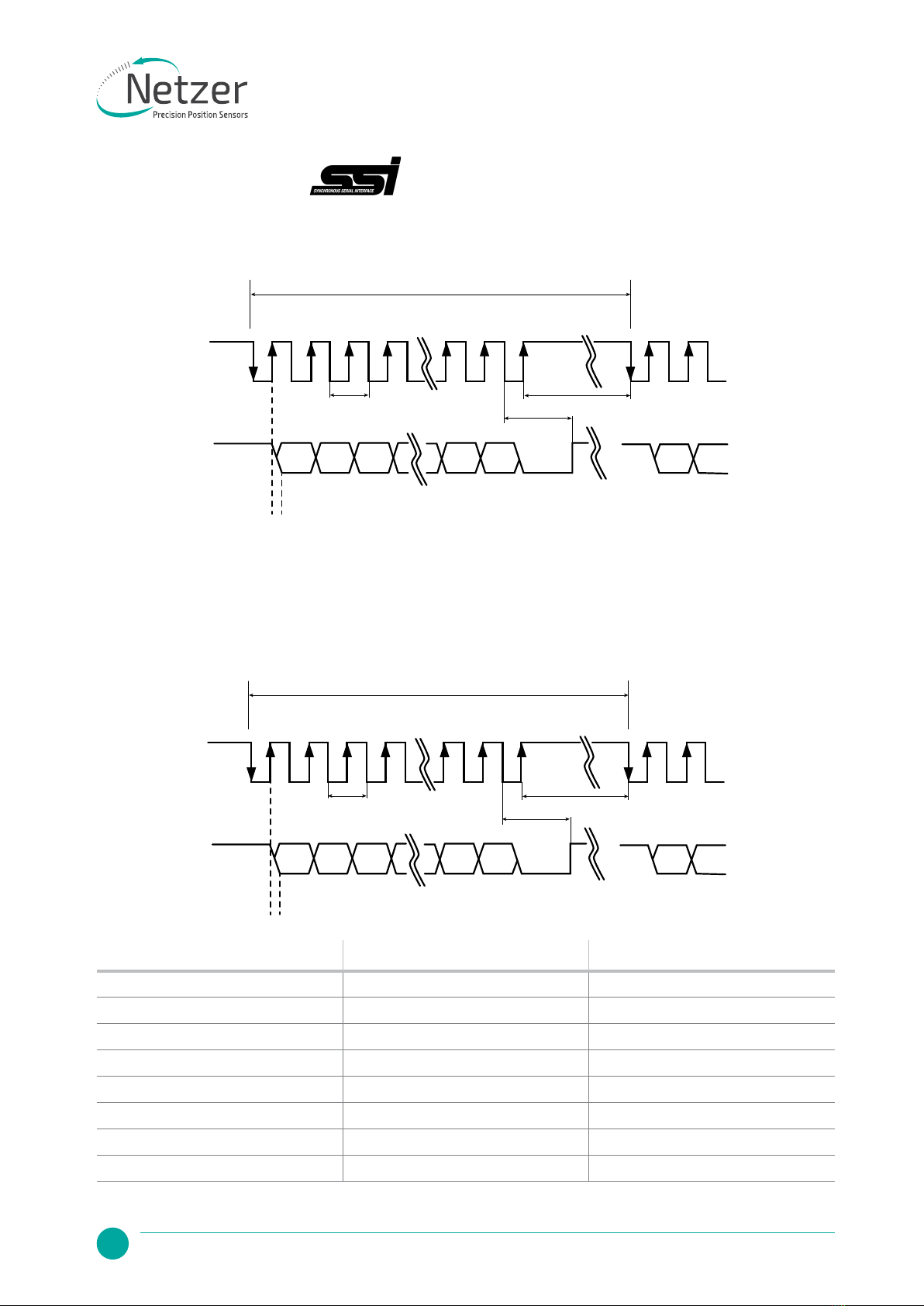
11.2 Digital SSi Interface
Master
Clock
Encoder
Data
Tr
1 2 3 4 n n+1
Tp
T
MSB
Tu
n-1 n-2 n-3 0
LSB
Tm
MSB
Synchronous Serial Interface (SSi) is a point to point serial interface standard between a master (e.g. controller)
and a slave (e.g. sensor) for digital data transmission.
Master
Clock
Encoder
Data
Tr
1 2 3 4 n+1 n+2
Tp
T
MSB
Tu
BIT n-1 n-2 0
LSB
Tm
MSB
Description Recommendations
n Position resolution 12-20
T Clock period
f= 1/T Clock frequency 0.1-5.0 MHz
Tu Bit update time 90 nsec
Tp Pause time 26 - ∞ μsec
Tm Monoop time 25 μsec
Tr Time between 2 adjacent requests Tr > n*T+26 μsec
fr=1/Tr Data request frequency
Built In Test option (BIT)
The BIT indicates critical abnormality in the encoder internal signals.
'0' – the internal signals are within the normal limits, '1' – Error
The Part Number of the encoder indicates whether the encoder includes BIT. If no BIT is indicated in the PN,
there is no additional error bit.

PRODUCT GUIDE
15
Netzer Precision Position Sensors
VLX-170
Hollow Shaft
Kit Encoder
Absolute
Rotary Encoder
VLX-170-PG-V02
BiSS – C Interface is unidirectional serial synchronous protocol for digital data transmission where the Encoder
acts as “slave” transmits data according to “Master”clock. The BiSS protocol is designed in B mode and C mode
(continuous mode). The BiSS-C interface as the SSi is based on RS-422 standards.
Built In Test option (BIT)
The BIT indicates critical abnormality in the encoder internal signals.
'1' – the internal signals are within the normal limits, '0' – Error
The Part Number of the encoder indicates whether the encoder includes BIT. If no BIT is indicated in the PN,
the error bit is always 1.
11.3 Digital BiSS-C Interface
Master
Clock
Position ErrStart TimeoutAck 0 (bits)
Encoder
Data
WCRC (6 bits)
Bit allocation per
encoder-resolution Description Default Length
17bit 18bit 19bit 20bit
27 28 29 30 Ack Period during which the encoder calculates the
absolute position, one clock cycle
0 1/clock
26 27 28 29 Start Encoder signal for “start” data transmit 1 1 bit
25 26 27 28 “0” “Start” bit follower 0 1 bit
8...24 8...25 8...26 8...27 AP Absolute Position encoder data Per
resolution
7777Error BIT (Built In Test option) 1 1 bit
6666Warn. Warning (non active) 1 1 bit
0...5 0...5 0...5 0...5 CRC The CRC polynomial for position, error and warning
data is: x6+ x1+ x0. It is transmitted MSB rst and
inverted.
The start bit and “0”bit are omitted from the
CRC calculation.
6 bits
Timeout
Elapse between the sequential “start”request cycle’s 25 μs

16 Product GuideVLX-170-PG-V02
11.4 Setup mode over NCP (Netzer Communication Protocol)
This service mode provides access via USB to a PC running Netzer Encoder Explorer application (on MS
Windows 7/10). Communication is via Netzer Communication Protocol (NCP) over RS-422 using the same set
of wires.
Use the following pin assignment to connect the encoder to a 9-pin D-type connector to the RS-422/USB
converter CNV-0003 or the NanoMIC.
Connect Netzer encoder to the converter, connect the converter to the computer and run the Electric Encoder Explorer
Software Tool
Electric encoder interface, D Type 9 pin Female
Description Color Function Pin No
SSi Clock / NCP RX Gray Clock / RX + 2
Blue Clock / RX - 1
SSi Data / NCP TX Yellow Data / TX - 4
Green Data / TX + 3
Ground Black GND 5
Power supply Red +5V 8
Setup
USB
Setup
USB
SSI / BiSS
Electric
Encoder
NanoMIC
Blue Box Electric
Encoder
or
11.5 Electrical connection and grounding
Observe the following grounding consideration:
1. The cable shield electrically floating (unconnected) by default.
2. Make sure the chassis is grounded.
3. It’s highly recommended to keep the motor PWM wires electrically shielded and/or kept away from the
encoder.
Note: 4.75 to 5.25 VDC power supply required

PRODUCT GUIDE
17
Netzer Precision Position Sensors
VLX-170
Hollow Shaft
Kit Encoder
Absolute
Rotary Encoder
VLX-170-PG-V02
12. Signal Verication
12.1 Starting the Encoder Explorer
Make sure to complete the following tasks successfully:
●Mechanical Mounting
●Electrical Connection to the encoder
●Encoder Explore Software Installation
Run the Encoder Explorer tool (EE)
Ensure proper communication with the encoder: (Setup mode by default).
The Encoder position-dial is colored blue when in Setup Mode, either through the NanoMic or the BlueBox (a).
Note that the operational mode is not available through the BlueBox (b).
The Signal amplitude bar indicates whether the signal is within the acceptable tolerance (c) . Note that prior to
performing the Signal Verification process the bar could indicate an out of tolerance signal (d).
Encoder data is displayed in the encoder data area (CAT No., Serial No.) (e).
The position dial display responds to shaft rotation (f).
It is important to perform the Signal Verification process prior to the calibration of the encoder to ensure
optimal performance.
a
b
c
d
f
e

18 Product GuideVLX-170-PG-V02
12.2 Signal verication process
The Signal Verification process ensures that the encoder is mounted correctly and provides good signal
amplitudes. This is performed by collecting raw data of the fine and coarse channels during rotation.
●Select <Signal Verification> on the main screen (a).
●Select <Start> to initiate the process (b).
●Rotate the shaft in order to collect the fine and coarse channels data (c).
b
c
a

PRODUCT GUIDE
19
Netzer Precision Position Sensors
VLX-170
Hollow Shaft
Kit Encoder
Absolute
Rotary Encoder
VLX-170-PG-V02
If the process is successful, the status “Signal verification successful” would appear (d).
The ‘amplitude circle’ would be centered between the two green circles, preferably in the middle of the
tolerance (e).
d
e
g
h
Note however, that mounting the encoder towards the extreme mechanical tolerances might cause the
amplitude circle to be offset from the exact middle of the nominal position.
If the signal is out of tolerance the Error notification“Amplitude is lower/higher than the min/max limit of XXX”
would appear (g).
In Addition, the status “Signal verification failed – perform calibration amplitude”would appear at the top (h).
●Stop the process and re-mount the encoder, making sure that the mechanical installation tolerances are
not exceeded, removing or adding shims as required.
●Repeat the Signal Verification process after the remount.
Once the signal verification process is successfully completed, proceed to the encoder calibration phase,
Section 13
20 Product GuideVLX-170-PG-V02
13. Calibration
The VLX encoders include several options for performing calibration:
●'Push-Button' Calibration
●Auto-calibration
●Manual Calibration
13.1 ‘Push-Button’ calibration
This simple calibration procedure is possible once the encoder is mounted and connected to the application,
without using the Encoder Explorer software or connecting to a PC.
In this calibration procedure, the zero point cannot be changed ans is set at the factory default zero point.
It is not possible to use the Push-Button calibration if the encoder rotation sector is less than 360 degrees.
13.1.1 ‘Push-Button’ calibration process
Connect a 5V power supply to the encoder and the calibration process can be started.
●Upon power connection the LED should continuously blink
green.
This means the encoder is ready for calibration
●Press the Push-Button (a) for 5 seconds.
●Continuously rotate the rotor for about 10-20 seconds.
The LED will blink alternately red & green (b).
●When the LED is showing constant green the calibration
process has ended successfully.
●If the LED blinks red this means that the calibration process
failed. In case of failure - refer to the troubleshoot table
below:
No. of blinks Calibration step with error Recommended corrective action
1 Noisy electrical environment 1. Improve grounding
2. Repeat calibration process
2 1. Signal Amplitude out of tolerance
2. Osets cannot be calibrated
1. Check Amplitudes via Encoder Explorer. (See Section 12)
2. Correct the mechanical installation and remount encoder
3. Repeat calibration process
3 1. Rotation speed too high for
calibration process
2. Process timed-out
Repeat calibration process at lower speed
If ‘Push Button’calibration repeatedly fails after the applying the corrective actions, revert to the auto or
manual calibration processes (sections 13.2 & 13.3).
If calibration still fails – contact Netzer support department.
(b)
(a)
This manual suits for next models
1
Table of contents
Other Netzer Media Converter manuals

























