Content Advising by Paul Uttley, Professor R. H. Bishop of the University of South Florida,
and National Instruments
Graphics by Todd McGeorge.
©2015 Pitsco, Inc., 915 E. Jefferson, Pittsburg, KS 66762
All rights reserved. This product and related documentation are protected by copyright and are distributed under licenses
restricting their use, copying, and distribution. No part of this product or related documentation may be reproduced in any
form by any means without prior written authorization of Pitsco, Inc.
All other product names mentioned herein might be the trademarks of their respective owners.
Contents
Preface..........................................................................................................................................................................................................................2
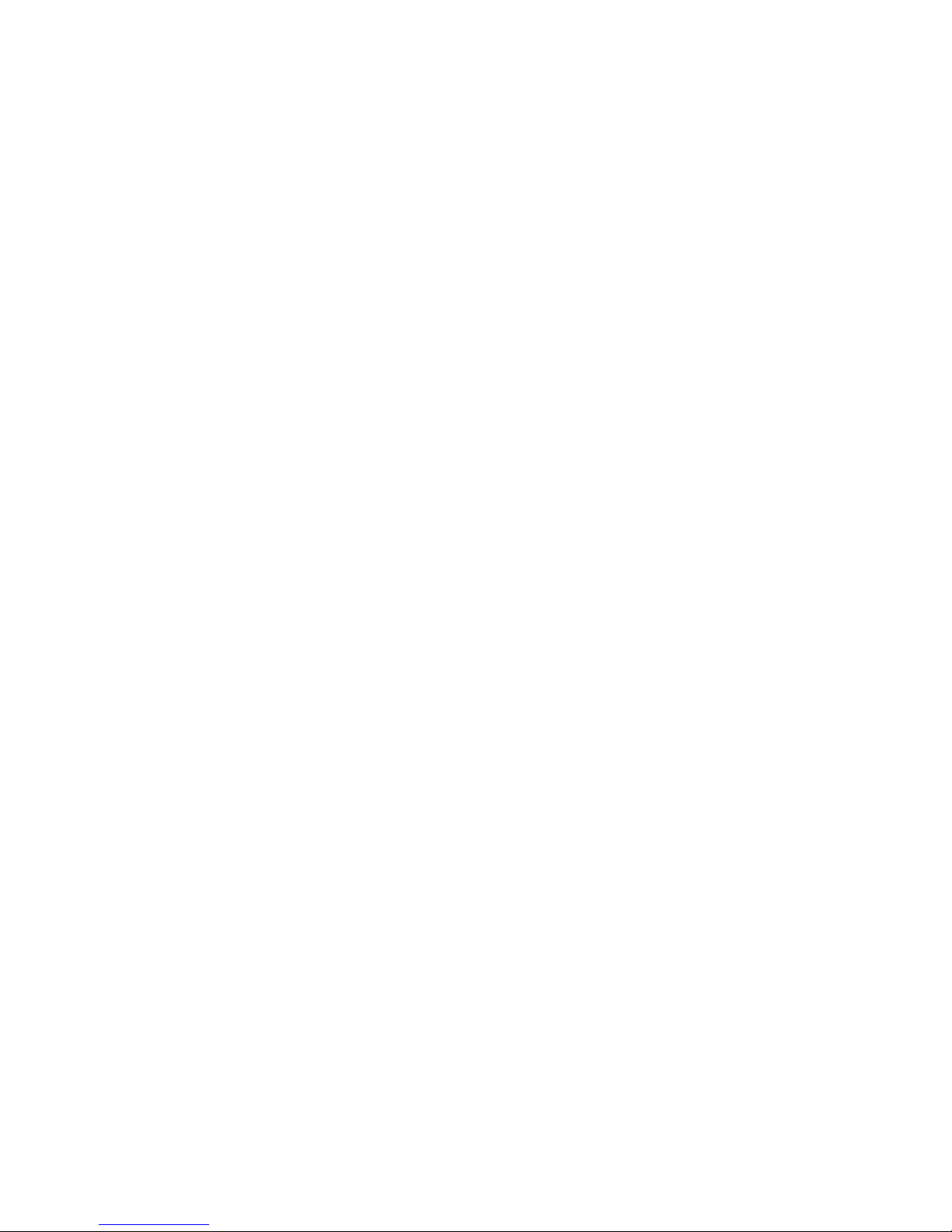
Set Components......................................................................................................................................................................................................3
Mechanical Parts ..............................................................................................................................................................................................4
Motors...................................................................................................................................................................................................................7
Sensors .................................................................................................................................................................................................................7
Additional Tools ................................................................................................................................................................................................7
myRIO Accessories...........................................................................................................................................................................................8
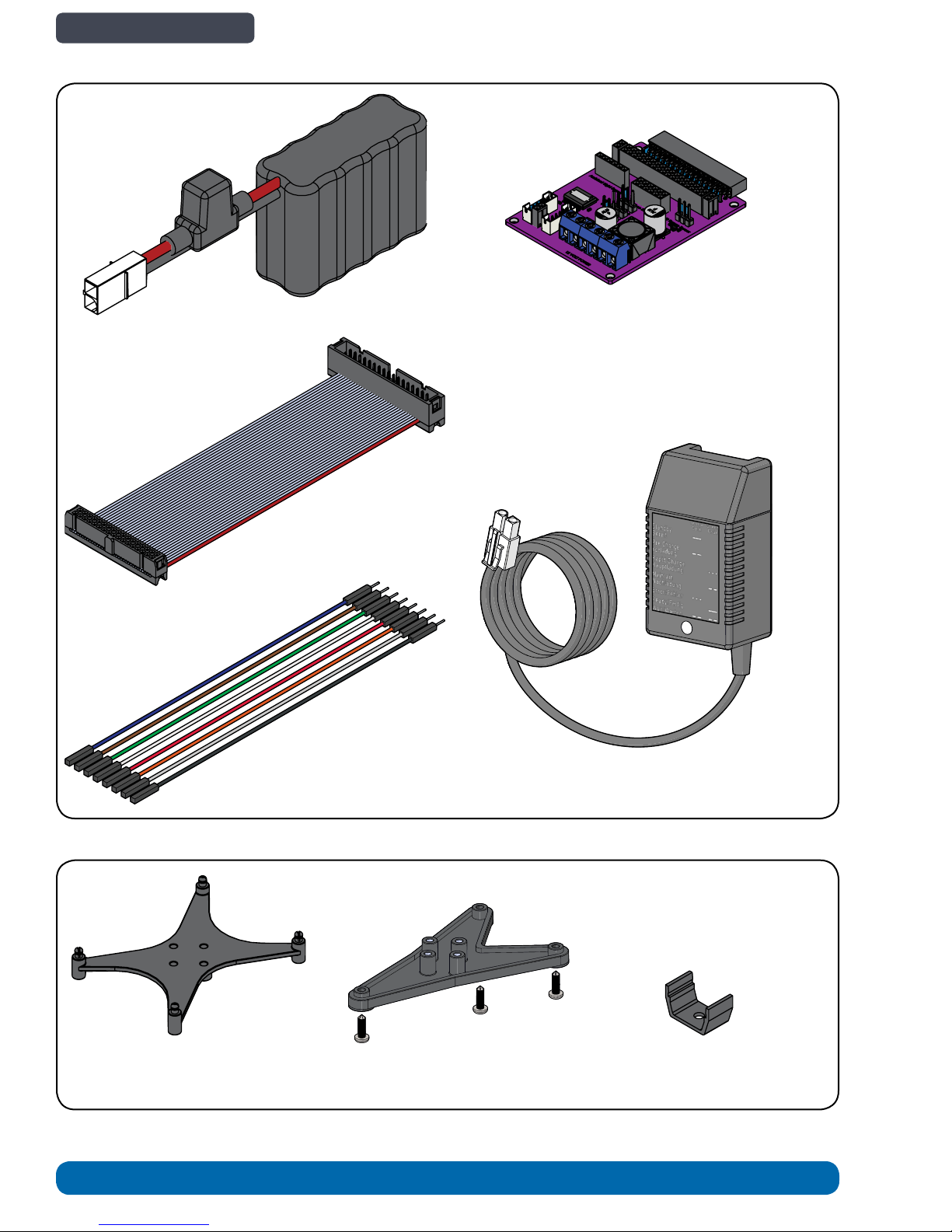
Brackets and Mounts......................................................................................................................................................................................8
Replacing and Supplementing Kit Parts ................................................................................................................................................9
Introduction to Building with TETRIX PRIME..............................................................................................................................................10
Subassembly Construction Instructions.................................................................................................................................................19
Standard Servo Mount Assembly...........................................................................................................................................................19
Gripper Assembly..........................................................................................................................................................................................22
DC Motor Mount Assembly ......................................................................................................................................................................26
Gyroscope Sensor Mount Assembly.....................................................................................................................................................28
IR Rangefinder Sensor Mount Assembly.............................................................................................................................................29
Motor Controller Board Mount Assembly ..........................................................................................................................................30
Cord Extension Assemblies for Electronics ........................................................................................................................................31
Introduction to myRIO and LabVIEW™ Graphical Programming..............................................................................................32
myRIO Overview............................................................................................................................................................................................32
LabVIEW™ Overview....................................................................................................................................................................................33
myRIO and LabVIEW Learning Resources and Manuals ...............................................................................................................34
Electronics Overview and Specifications................................................................................................................................................35
myRIO Motor Controller Board................................................................................................................................................................35
Infrared (IR) Range Sensor.........................................................................................................................................................................37
Ambient Light Sensor .................................................................................................................................................................................38
Gyroscope Sensor .........................................................................................................................................................................................39
Servo Motor.....................................................................................................................................................................................................40
DC Motor and Encoder...............................................................................................................................................................................41
Motor Controller Board Resource Conflicts .......................................................................................................................................43
Control System Set Up and Testing............................................................................................................................................................44
LabVIEW and myRIO Setup.......................................................................................................................................................................44
Set Up and Test the IR Sensor ..................................................................................................................................................................45
Set Up and Test the Ambient Light Sensor ........................................................................................................................................47
Set Up and Test the Gyroscope Sensor................................................................................................................................................48
Set Up and Test the Servo Motor............................................................................................................................................................49
Set Up and Test the DC Motor and Encoder......................................................................................................................................50
Build Instructions
Rover Vehicle Assembly................................................................................................................................................................... 53-82
Balancing Arm Assembly ..............................................................................................................................................................83-122
Self Balancing Robot Assembly.............................................................................................................................................. 123-158
Resources................................................................................................................................................................................................................ 159