2
Table of Contents
1Using This Guide ............................................................................................................................................................................................... 3
1.1 Purpose.......................................................................................................................................................................................................... 3
1.2 Additional Documentation .............................................................................................................................................................................. 3
1.3 Disclaimer....................................................................................................................................................................................................... 3
2Physical Description ......................................................................................................................................................................................... 4
2.1 Front Panel..................................................................................................................................................................................................... 4
2.1.1 Status LCD ........................................................................................................................................................................................... 4
2.1.2 LED indicators ...................................................................................................................................................................................... 5
2.2 Rear Panel ..................................................................................................................................................................................................... 5
3Hardware Installation ........................................................................................................................................................................................ 6
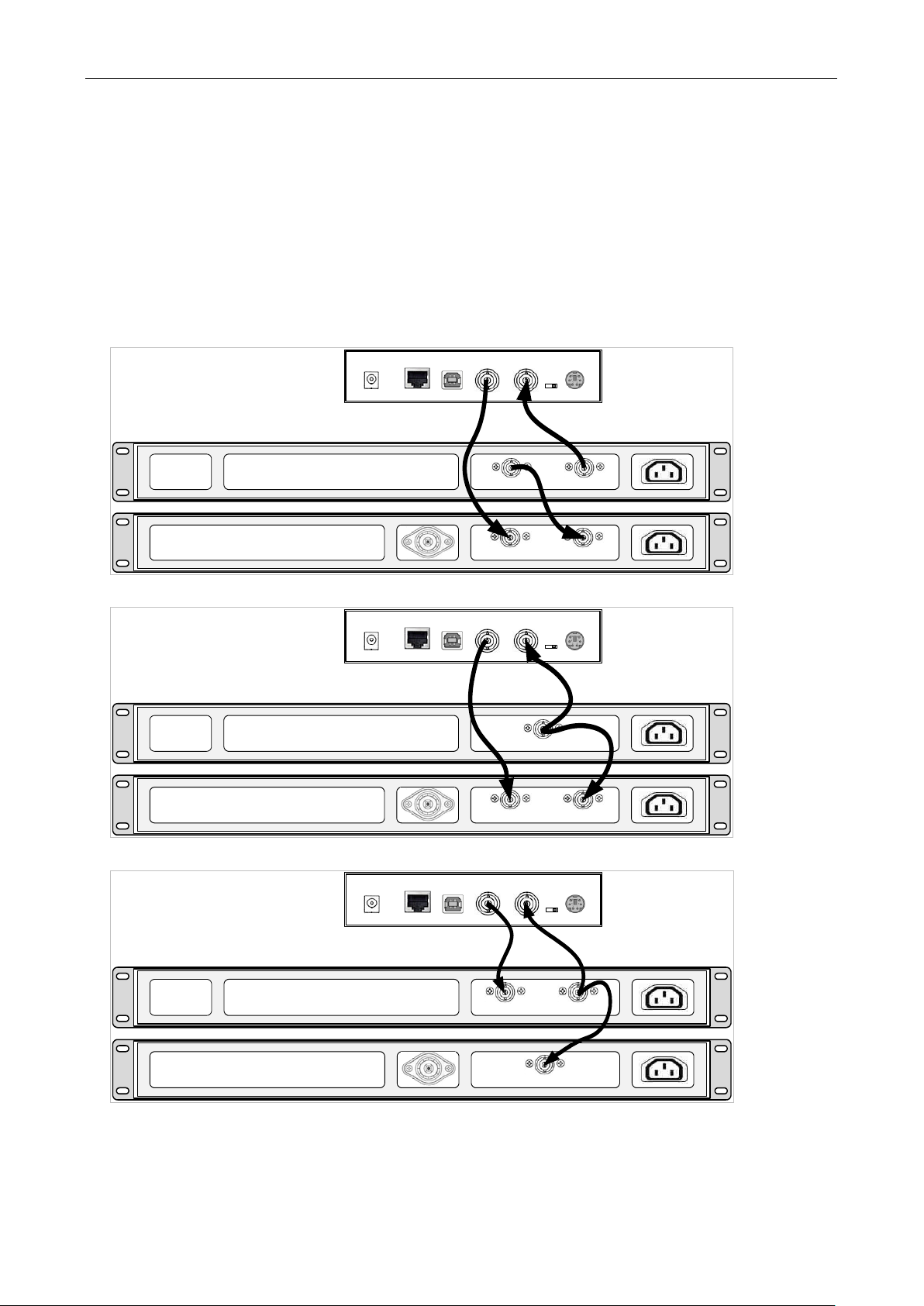
3.1 Connecting the RDS Encoder........................................................................................................................................................................ 6
3.2 Hardware Settings.......................................................................................................................................................................................... 7
3.2.1 On-board adjustable elements ............................................................................................................................................................. 7
3.2.2 Loop/Side switch .................................................................................................................................................................................. 7
3.3 Power Supply ................................................................................................................................................................................................. 8
3.4 Connecting the RDS Encoder to a Local PC ................................................................................................................................................. 8
3.5 RDS Level Adjustment................................................................................................................................................................................... 8
3.6 Low Power Operation..................................................................................................................................................................................... 9
4Software Installation........................................................................................................................................................................................ 10
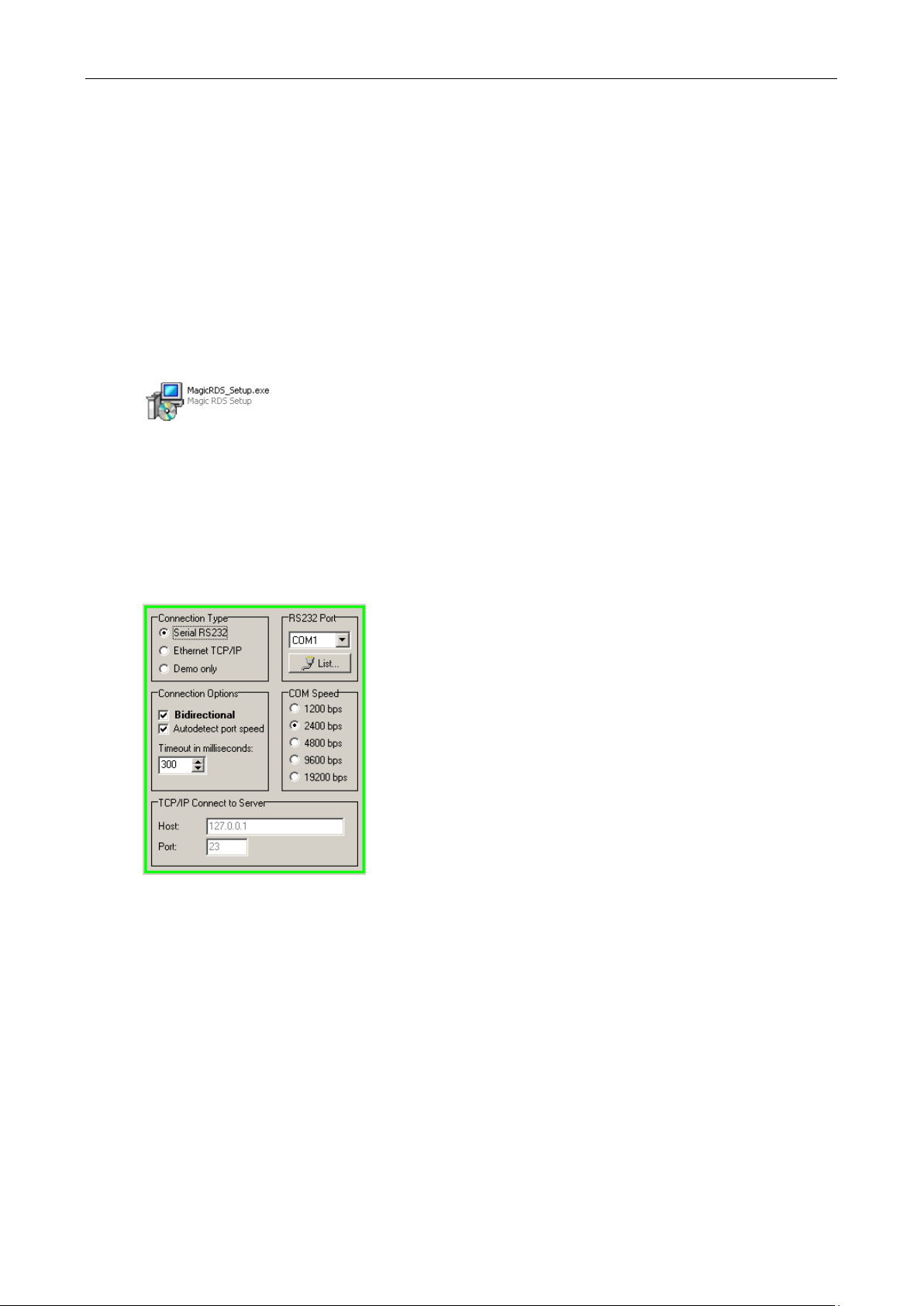
4.1 Establishing a First Communication with the RDS Encoder ........................................................................................................................ 10
4.2 Remote Configuration of the RDS Encoder ................................................................................................................................................. 11
4.2.1 Finding out actual RDS encoder’s IP address.................................................................................................................................... 11
4.2.2 Remote configuration of the RDS encoder using internal website..................................................................................................... 11
4.2.3 Remote configuration of the RDS encoder using the Windows control software............................................................................... 11
4.3 Device Setup................................................................................................................................................................................................ 12
4.3.1 Device Setup from Magic RDS........................................................................................................................................................... 12
4.4 Setting Basic RDS Data ............................................................................................................................................................................... 14
4.4.1 PI (Program Identification).................................................................................................................................................................. 14
4.4.2 PS (Program Service name)............................................................................................................................................................... 14
4.4.3 PTY (Program Type) .......................................................................................................................................................................... 14
4.4.4 TP (Traffic Program)........................................................................................................................................................................... 15
4.4.5 MS (Music/Speech) ............................................................................................................................................................................ 15
4.4.6 AF (Alternative Frequencies).............................................................................................................................................................. 15
5Broadcast Automation System Link-up ........................................................................................................................................................ 16
5.1 Indirect Link.................................................................................................................................................................................................. 16
5.2 Direct Link .................................................................................................................................................................................................... 16
5.2.1 Recommended procedure step-by-step ............................................................................................................................................. 16
5.2.2 Data format......................................................................................................................................................................................... 16
5.2.3 Compatibility commands .................................................................................................................................................................... 17
5.2.4 Radiotext Plus (RT+ tagging) ............................................................................................................................................................. 17
5.2.5 X-Command for RDS encoders.......................................................................................................................................................... 17