PAGE
2 / 48
Via Ugo Foscolo, 20
36030 - CALDOGNO - VICENZA - ITALY
Rev.5 - 20/03/09
INDEX
Chapter 1: GENERAL WARNINGS BEFORE INSTALLATION ............................................................. pag. 3
- Description of symbols in the manual................................................................................................... pag. 3
- General instructions on safety ............................................................................................................... pag. 3
- Dangerous situations............................................................................................................................. pag. 3
- Responsibility and warranty................................................................................................................... pag. 3
- Compatibility of the manual with the firmware version of the inverter.................................................. pag. 3
Chapter 2: KEYBOARD OPERATING INSTRUCTIONS ........................................................................ pag. 4
- General description ................................................................................................................................ pag. 4
- Display when starting ............................................................................................................................. pag. 4
- Keys function........................................................................................................................................... pag. 4
- Procedure to modify a parameter .......................................................................................................... pag. 4
Chapter 3: QUICK INSTALLATION IN SCALAR MODE........................................................................ pag. 5-7
- Quick installation aims ........................................................................................................................... pag. 5
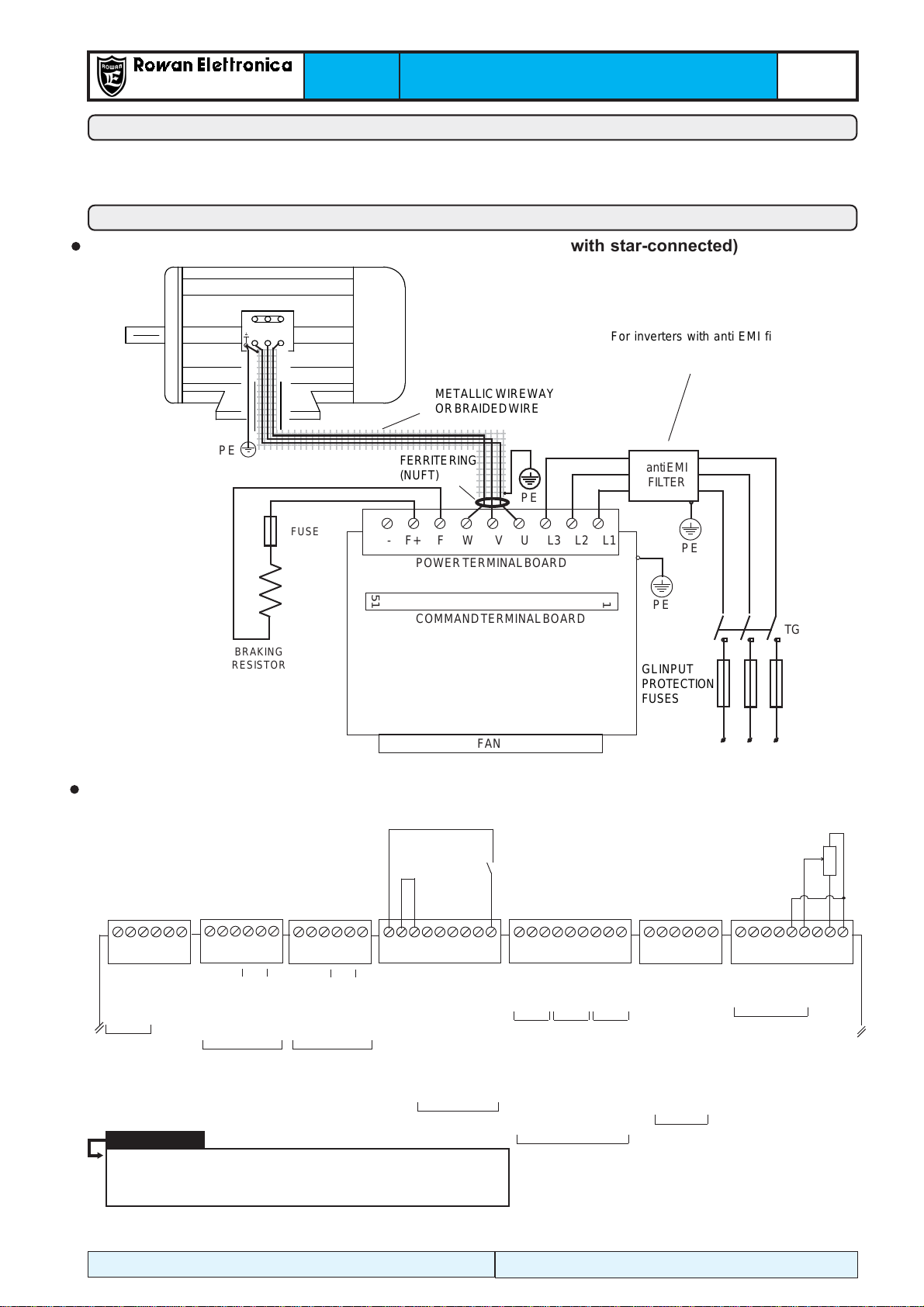
- Connection diagrams............................................................................................................................. pag. 5
-Installation ............................................................................................................................................... pag. 6-7
- Procedure to restore default setups ...................................................................................................... pag. 7
Chapter 4: QUICK INSTALLATION IN VECTORIAL MODE .................................................................. pag. 8-9
- Quick installation aims. .......................................................................................................................... pag. 8
- Connection diagrams . ........................................................................................................................... pag. 8
-Installation ............................................................................................................................................... pag. 9
Chapter 5 : TECHNICAL FEATURES ..................................................................................................... pag. 10-13
- Genaral features of the inverter potentialities ....................................................................................... pag. 10-11
- Electric and power characteristics summary tables for the inverter Series 400 ................................. pag. 12-13
- Inverter derating according to PWM frequency ...................................................................................... pag. 13
Chapter6:MECHANICALINSTALLATION ................................................................................................ pag. 14-15
- Drives dimensions and weights ............................................................................................................ pag. 14
- Suggestions for a correct installation.................................................................................................... pag. 15
Chapter7:ELECTRICALINSTALLATION................................................................................................. .. pag. 16-19
- General warnings before connection of the threephase power supply ............................................... pag. 16
- Wiring system and electromagnetic compatibility ................................................................................ pag. 16
- Table of threephase anti E.M.I. filters and ferrite toroids for different inverters...................................... pag. 17
- Reducing the harmonic distortion .......................................................................................................... pag. 18
- Table of filters reducing the harmonic distortion for different inverters.................................................. pag. 18
- Reducing the dV/dt .................................................................................................................................. pag. 19
- DV/dt reduction filters table for different inverters ................................................................................... pag. 19
- Electrostatic discharges (ESD)............................................................................................................... pag. 19
Chapter 8: BRAKING RESISTORS ......................................................................................................... pag. 20-21
- Table of braking resistors for Rowan inverters..................................................................................... pag. 20
- Dimensions of Rowan braking resistors .............................................................................................. pag. 21
- Mechanical installation and electrical connection ................................................................................ pag. 21
- Inverter setup for dynamic braking ......................................................................................................... pag. 21
Chapter 9: TERMINAL BOARD DESCRIPTION..................................................................................... pag. 22-27
- Power terminal board description ......................................................................................................... pag. 22
- Standard terminal board for signals description .................................................................................. pag. 22-25
- Optional B404S.A card-edge connectors description........................................................................... pag. 26-27
Chapter 10: COMPLETE PARAMETERS LIST WITH STANDARD SETUPS AND DISPLAYS.......... pag. 28-34
Chapter 11: SUMMARY TABLES FOR I/O RESOURCES PARAMETERS.......................................... pag. 35
Chapter 12: INVERTER FAULTS AND ALARMS ................................................................................. pag. 36
Chapter 13: ROWAN G-SERIES VECTORIAL MOTORS...................................................................... pag. 37-41
- Motors general features ......................................................................................................................... pag. 37
- Motors connection description............................................................................................................... pag. 38-39
- Measures of motors with brake ............................................................................................................. pag. 40
- Brakes electromechanical features table ............................................................................................. pag. 41
- Brake connection .................................................................................................................................... pag. 41
- Fan systems and protection levels table for motors and fans ............................................................. pag. 42
- Motors mechanical limits ....................................................................................................................... pag. 42
- Guide to "Motor/Inverter pairing off" tables............................................................................................. pag. 43
- Motor/Inverter pairing off table (1500 rpm - 380/460Vac)...................................................................... pag. 44
- Motor/Inverter pairing off table (3000 rpm - 380/460Vac)...................................................................... pag. 45
Chapter 14: INFORMATION ON MANUALS .......................................................................................... pag. 46