10
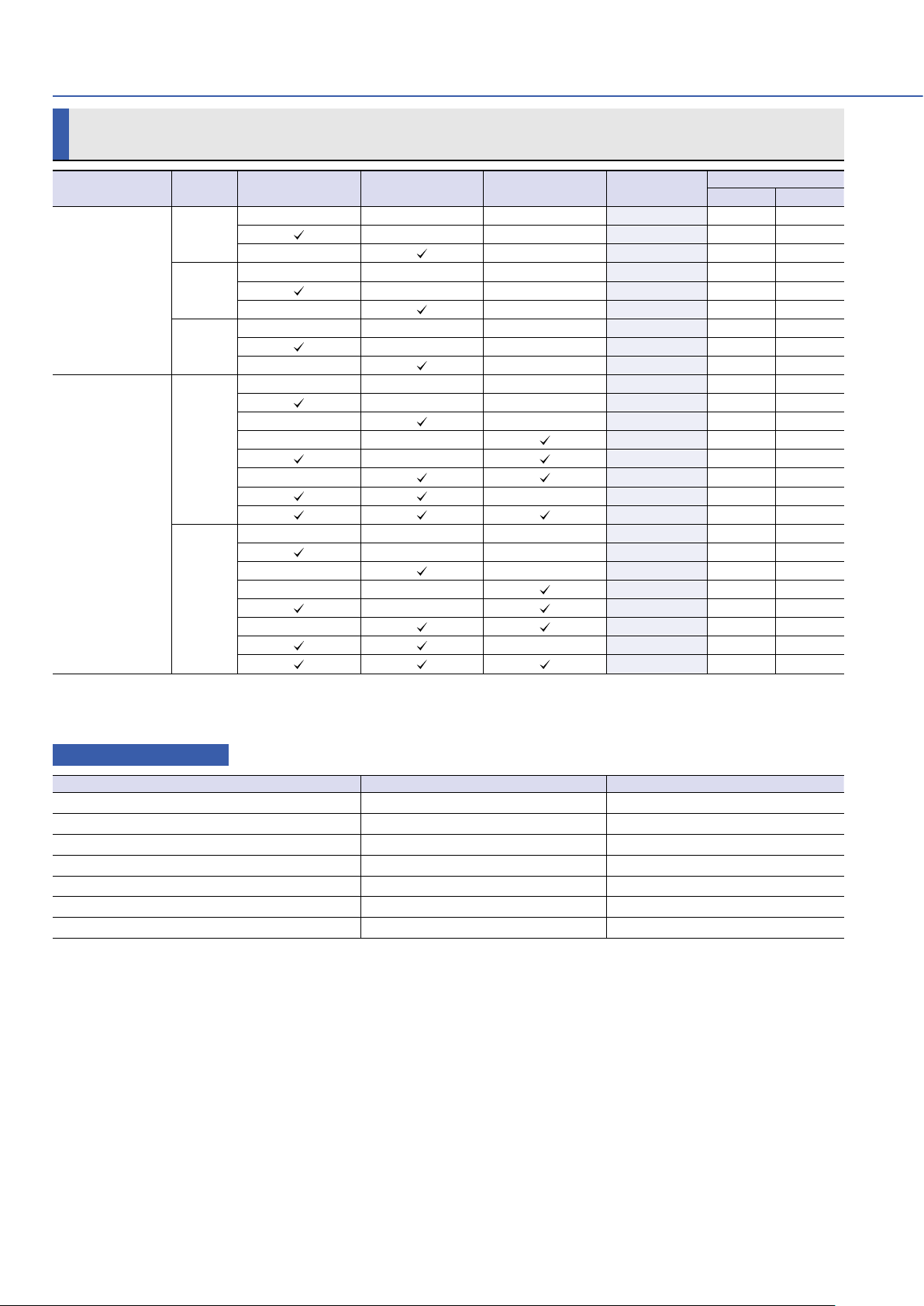
Specifications
Servo motor model no. Inside
《
》
indicates motor flange size
KB402
《42 mm sq.》
KB404
《42 mm sq.》
KB406
《42 mm sq.》
Condition
Symbol
Unit
Rated output ☆☆ PRW 23 40 60
Rated armature voltage ☆☆ VRV 20 24 24
Rated torque ☆☆ TRN
・
m 0.074 0.13 0.19
Rated armature current ☆☆ IRA 1.8 2.7 4.1
Rated speed ☆☆ NRmin-1 3000 3000 3000
Continuous stall torque ☆☆ TSN
・
m 0.08 0.14 0.20
Peak stall torque ☆☆ TP(N) N
・
m 0.42 0.76 1.2
Armature stall current ☆☆ ISA 1.8 2.7 4.1
Peak armature stall current
☆☆ IP(N) A 10 14 23
Maximum speed Nmax min-1 5000 5000 5000
Rated power rate ☆☆ QRkW/s 1.2 2.0 3.3
Torque constant ☆KTN
・
m/A 0.047 0.057 0.056
Voltage constant ☆KE×10-3V/min-1 4.9 6.0 5.9
Rotor inertia JM×10-4kg
・
m20.047 0.084 0.108
Armature winding resistance
☆Ra Ω 3.2 1.7 0.94
Armature inductance ☆La mH 0.9 0.7 0.5
Mechanical time constant ☆tm ms 6.9 4.4 3.2
Electrical time constant ☆te ms 0.28 0.41 0.53
Coefficient of voltage generated
☆KEG V/min-1 3×10-3±10%
Effective (rms) ripple ☆ε
s% 2
Peak-to-peak ripple ☆ε
s% 5
Linearity ☆δL% 1
Armature winding resistance
☆R1Ω 37
Armature inductance ☆L1mH 5
Minimum load resistance ☆RLkΩ 10
Rotor inertia JTG ×10-4kg
・
m20.011
Voltage ☆VBV––––
Current ☆IBA––––
Holding torque ☆☆ TBN
・
m––––
Inertia JB×10-4kg
・
m2––––
Resistance ☆RBΩ––––
Mass See the Dimensions section
Size of aluminum plates for heat dissipation during measurement
250 ×250 ×6 mm
Pulses per revolution for encoder
Line driver Standard: 2000 P/ROptional: 200,500,1000 P/R
Open collector Optional: 200,500,1000,2000 P/R
Oil seal ––––
■
Speed-Torque Characteristics
Servo motor model no. / Flange size / Rated output
KB402/42 mm/23 W KB404/42 mm/40 W KB406/42 mm/60 W
0
0.1
0.2
0.3
0.4
0.5
0
2000 3000 4000 500
1000
-1
Intermittent duty zone
V=20V
Continuous duty zone
0
0.2
0.4
0
2000 3000 4000 500
1000
0.6
-1
Intermittent duty zone
Continuous duty zone
V=24V
0
0.5
1
0
2000 3000 4000 50001000
-1
Intermittent duty zone
V=24V
Continuous duty zone
Input voltage
24 VDC class (Low-voltage model)
MotorTachogeneratorBrake
Encoders can not be installed to KB4 models with a tachogenerator.
The holding brake cannot be used for dynamic braking.
Holding brakes are also available in 24 and 48 V. (Optional)
Specifications are subject to change without notice.
24 VDC class models (low-voltage models) are outside the scope of CE
marking and UKCA marking.
The values in the row with "☆" are for when the ambient temperature and
armature winding temperature are 25°C.
The values in the row with "☆☆" are after thermal equilibrium is established.
The values in the table above are for when operated with a stable DC current
at ambient temperatures below 40°C.
The values for the tachogenerator are for when the test circuit shown below is
used.
10kΩ
10kΩ
0.1μF
TG