7
Installing the Windowscontrol program, AzElControl.exe
On the CD-ROM, there is a directory named ‘SatEL control program’. You can look at
the contents of the CD-ROM by using either WindowsExplorer or My Computer. In this
directory, there is an entry named ‘setup.exe’. You run this program to install AzElControl.exe
onto your hard disk and you do this by simply double-clicking setup.exe. The program will
automatically be installed on your computer. Before running it for the first time, it is advisable
to use a simple terminal program, such as the shareware Kermit program included on the CD-
ROM, to determine which serial port is connected to the nine-pin RS-232 connector on your
computer. Finding the correct serial port is described below.
Installing the Kermit terminal program
On the CD-ROM, there is another directory named ‘Terminal program’ and, in this
directory there is a single entry named ‘kw32v085.exe’. This is a program that, on being
double-clicked, will install a terminal program named Kermit to your hard disk. Those of you
with any long background in microcomputers will recognize the name Kermit as one of the
most useful of a long series of terminal and data transfer programs used on simple machines
twenty years ago. This is a simple Windowsversion of the program.
Finding the correct serial port
We will use Kermit to identify which port number is associated with the nine-pin RS-232
connector which you will use to interface to the SatEL system. If you haven’t already done so,
plug in the cable between the RS-232 connector on your computer and the RS-232 connector
on the SatEL controller and then power up the SatEL system by plugging in the wall wart. The
rotors should not move – if they do, you have a problem and it is likely with the wiring between
the rotors and the controller. If the rotors do not move, you can proceed to the next step,
which is to run the Kermit program. You can find it by clicking Start| Programs | Kermit |
Kermit. A window should open up on your desktop with a black background. This is the
terminal screen.
You need to first configure Kermit to 9600 baud and you do this with Configure |
Communications. Set the baud rate to 9600. All the other default settings are fine for now.
Notice that Port 1 is selected. Now, click the Session pull down window and check Connect.
The Kermit program is now connected to your computer’s Port 1. You can determine whether
that is the serial port going to your SatEL controller by typing a single question mark
character;’?’, without an Enter or CR. If the connection is correct, you will see the controller
response: the word ‘SatEL’ will appear on the screen. If so, you are done and you can now
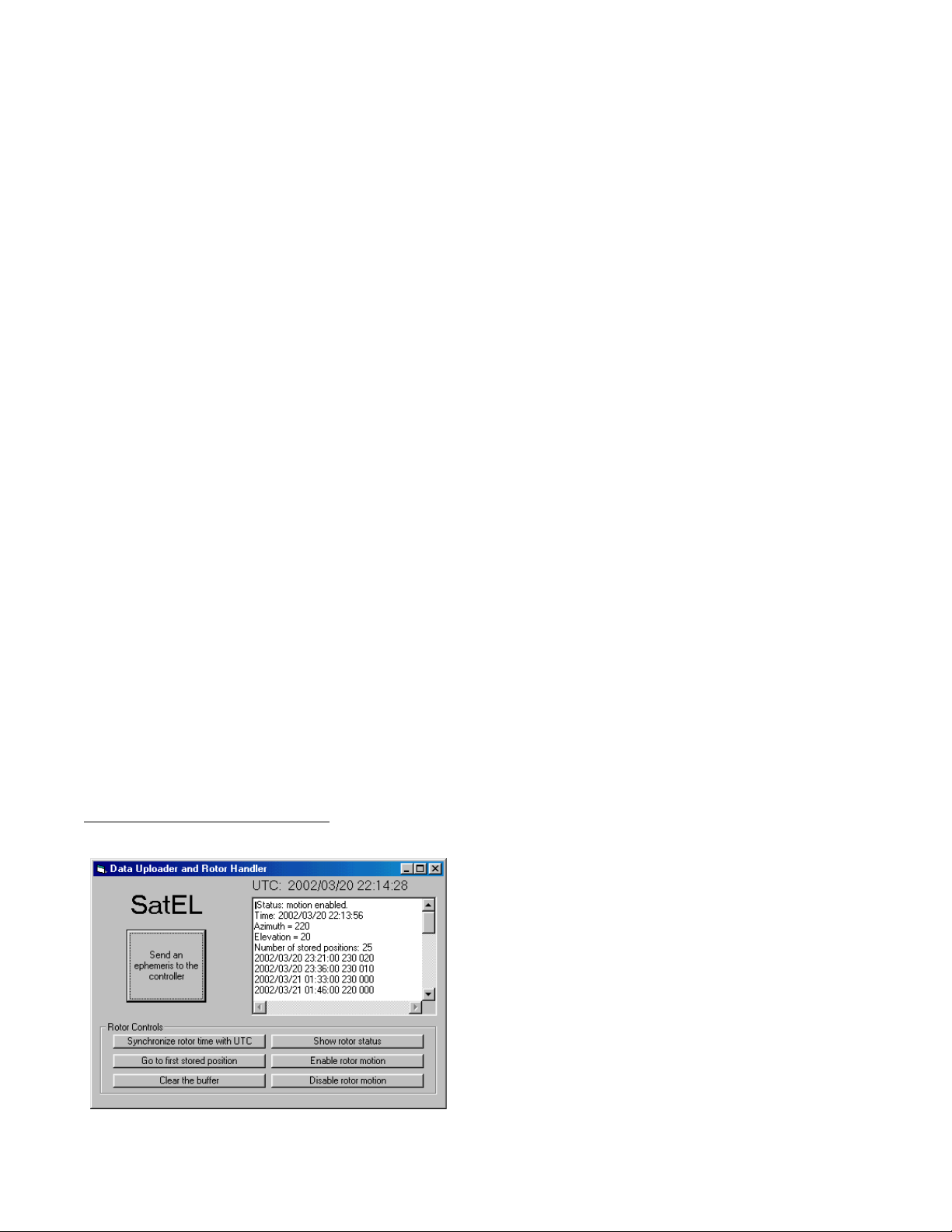
use the terminal, if you wish, to interact with the SatEL controller. Typing a single ‘z’, for
instance, will elicit a response from the controller that will return the current status of the
controller. If you’ve turned it on for the first time, it will show that motion is disabled, the time is
at the beginning of the year 2000, and there are no stored positions in memory.
If you did not get the ‘SatEL’ response, it means that the controller is not connected to
Port 1. Disconnect the program from Port 1 by pulling down the Session window and un-
checking Connect. Now, pull down Configure again and select Communication again but this
time check the Port 2 button. Again pull down the Session window and check Connect. You
are now connected to Port 2. Again, type in a single question mark. If you get the ‘SatEL’
response, you are now connected and you know that Port 2 is the correct port for your