Page 17
4.2.2 Pressurised Systems
Bleeding a pressurised system is a more com-
plicated procedure than a standard two or three
line system. Simrad recommends that you
enquire with the steering system manufacturer
for specific bleeding instructions. However, the
following instructions apply to most Hynautic
or similar pressurised systems.
1. Loosen the relief valve screws. Unscrew by
hand counter-clockwise as far as they will go.
2. The reservoir should be fitted with an air
valve of the type used on car tyres. Connect
a foot pump or compressed air line to the
valve and begin to pressurise the system
slowly (Fig 4.7).
3. As the system is pressurised, the oil level in
the reservoir should drop as it is forced into the
system. Stop pressurising the system if the oil
level drops below the fill line - release the air
pressure in the system through the air valve by
pushing the centre pin, remove the reservoir
filler cap and top up the reservoir. Replace the
filler cap.
4. Continue pressurising the system and top-
ping up the reservoir until the manufacturer’s
recommended pressure is reached.
5. Do not allow the reservoir to empty.
Always depressurise the system as described
in step 3 before removing the reservoir filler
cap.
6. Loosen the hose fitting to port A on the
SRP12 pump.
7. Bleed until a steady stream of oil comes from
the hose fitting. Retighten the hose fitting.
8. Repeat steps 6 & 7 with port B.
9. Repeat steps 6 & 7 with the Return (R) port.
10. If there is more than one steering position,
start with the highest helm. Turn the helm
slowly (less than 1⁄2revolution per second) 6
times in one direction only.
11. Repeat the above step with each successive-
ly lower helm position (Fig 4.8). This includes
the SRP12 pump.
12.Prime the SRP12 pump by connecting it
directly to 12v and driving the rudder to the
endstop (Red to 12v+, Black to Ground).
Reverse the connections (Black to 12v+, Red to
Ground) to run the pump to the other endstop.
Make sure that the oil level in the helm/reser-
Fig 4.7 - Pressurising steering system
Fig 4.8 - Purging sequence
FLYBRIDGE
1. Helm
CABIN
2. Second Helm
ENGINE BAY
3. SRP12
Page 16
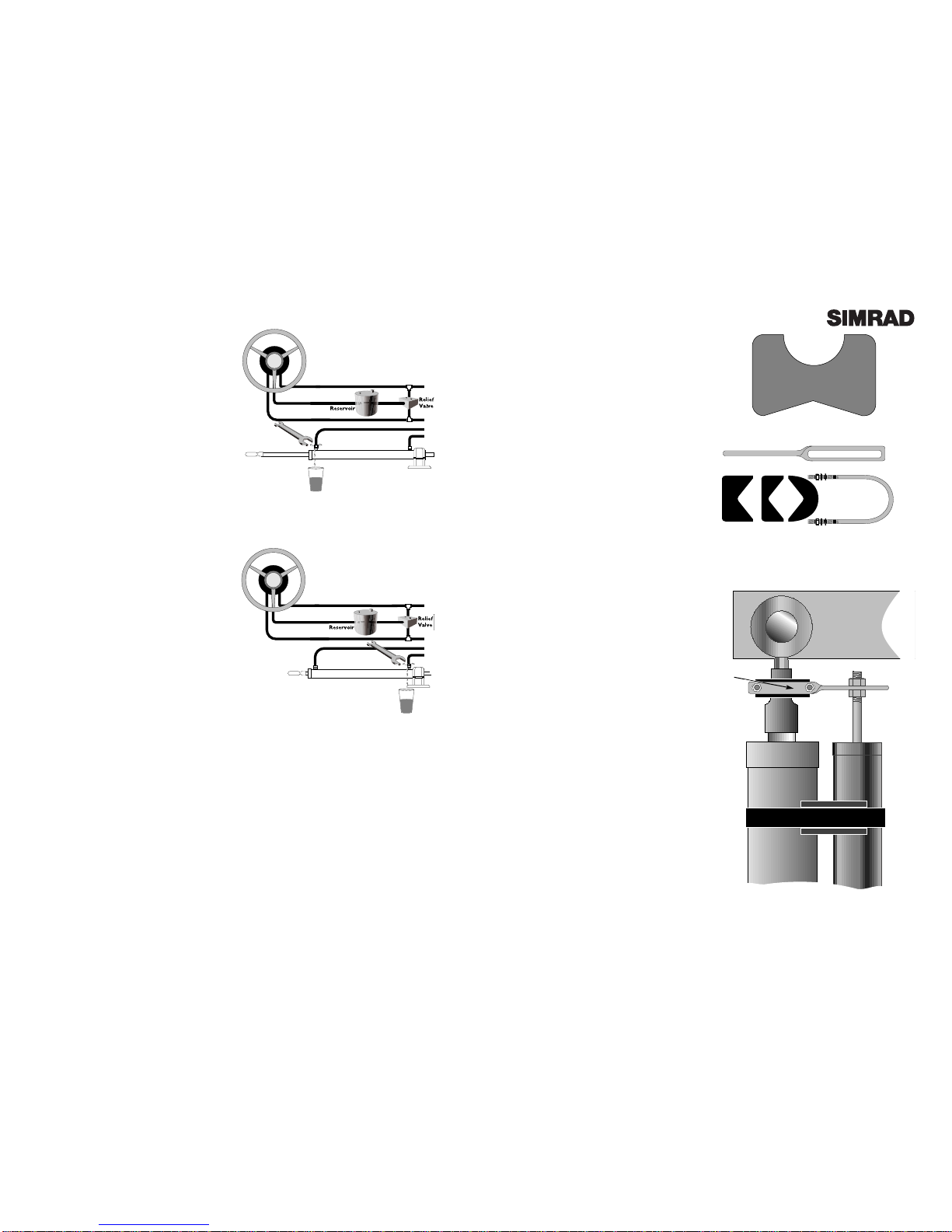
7. Turn the helm clockwise until the ram is fully
extended.
8. Open the bleed valve on the ram cylinder
nearest to the extended ram. If there are no
bleed valves fitted to the cylinder, loosen the
nut connecting the hydraulic hose to the cylin-
der to allow the air to escape. Do not com-
pletely undo the bleed valve or nut.
9. Holding the ram to stop it retracting into the
cylinder, turn the helm anti-clockwise until a
steady stream of oil comes out of the bleeder
with no air bubbles (Fig 4.5). Drain at least 1⁄2
litre (1 pint) of oil to ensure all air is purged
from the system. Retighten the bleed valve.
10. Keep the reservoir/helm unit filled up as oil
is pushed down into the system. Never allow
the oil level to drop below the rotor which
can be seen through the top filler hole in the
helm pump.
11. When all the air has been bled from the
lines, keep hold of the ram and slowly turn the
helm while tightening the bleed valve/nut.
12. Release ram and continue to turn the helm
counter-clockwise until the ram is fully retracted.
13. Open the bleed valve/hose nut on the
opposite end of the cylinder.
14. Holding the ram to stop it extending from
the cylinder, turn the helm clockwise until a
steady stream of oil comes out of the bleeder
with no air bubbles (Fig 4.6). Drain at least 1⁄2
litre (1 pint) of oil to ensure all air is purged
from the system. Retighten the bleed valve.
15. Keep the reservoir/helm unit filled up as oil
is pushed down into the system, taking care
that the oil level never drops below the rotor
which can be seen through the top filler hole in
the helm pump.
16. When all the air has been bled from the
lines, keep hold of the ram and slowly turn the
helm while tightening the bleed valve/nut.
17. Maintain the helm or reservoir at the indi-
cated fill line.
18. Check every joint and tube for leaks.
19. Fasten all tubing down to prevent fracture
due to vibration.
20. The manufacturer’s instructions should give
details of the correct number of turns lock to
lock when the system is properly bled. An
excessive number of turns indicates that there is
still air in the system.
Fig 4.5 - Bleeding starboard hydraulic line
Fig 4.6 - Bleeding port hydraulic line