Sitex SP120 User manual

SP120 Autopilot
User Manual v1
SI-TEX Main Oce Address:
25 Enterprise Zone Drive, Ste 2
Riverhead, NY 11901
Tel: +1-631-996-2690
Email: [email protected]
Web: www.si-tex.com
IMPORTANT: PLEASE RETAIN ON BOARD

(This page intentionally left blank)
Contents
Warnings 2
SP120 Autopilot System 2
Block Diagram Of Full System 3
Installation Of System Components 4
Display Unit 4
Compass 5
Rudder Feedback Unit 6
GPS Wiring Connections 8
Hydraulic Reversing Motor Connection 8
Mechanical Reversing Motor Connection 8
Initial Operational Settings 9
Motor Direction – Automatic Set Up 9
Motor Direction – Manual Set Up 9
Sensitivity 10
Rudder Ratio 10
Backlighting 10
Set Rudder Limits 10
Compass Heading 10
Compass Calibration 11
Compass Alignment 11
Technical Adjustments 11
Parameters List 11
Adjusting The PID Control 14
SP120 Default Settings 15
Setting Up Your GPS Unit 16
SP120 Alarms 16
O Course Alarm 16
GPS Alarm 16
Denition Of Terms 17
Overview Of Operation 17
Testing Procedure 18
Trouble Shooting 19
Warranty 20
Additional Information 21

2 of 22 SI-TEX Marine Electronics - SP120 Autopilot
Warnings
• The autopilot is a navigational
aid; an adequate watch must
be maintained at all times when
autopilt is in use.
• The autopilot must be placed in
manual mode when the vessel
is stationary as the system will
continue to drive the rudder to the
end of its travel and damage the
system can result.
• It is strongly recommended that
the autopilot not be used while
navigating in restricted waterways
as water currents, wind changes
or radio transmitter interference
can endanger your own or other
vessels.
• If a GPS is connected to the
system, the auto mode will not
engage below a speed of one knot
and will disengage from auto when
the vessel slows to one knot.
SP120 Autopilot System
The SP120 Autopilot control system
comprises the following units:
• SP120 display and control head.
• SI-TEX E-compass
• Rudder Feedback Unit
(SP120R only).
In addition the SP120 has to be
connected to a drive unit which
controls the rudder actuator system
in order to complete the full autopilot
system. The actuator system
provides the physical movement to
the rudder responding to the direction
of control signals provided by the
SP120. A rudder actuator system
comprises one of the following:
• Hydraulic system with helm pump
and ram
• Mechanical steering system
The autopilot should be connected
to a:
• Reversing motor / pump set
connected into the existing
hydraulic steering system; or
• Reversing mechanical drive unit
connected to the existing steering
mechanism
3 of 22SI-TEX Marine Electronics - SP120 Autopilot
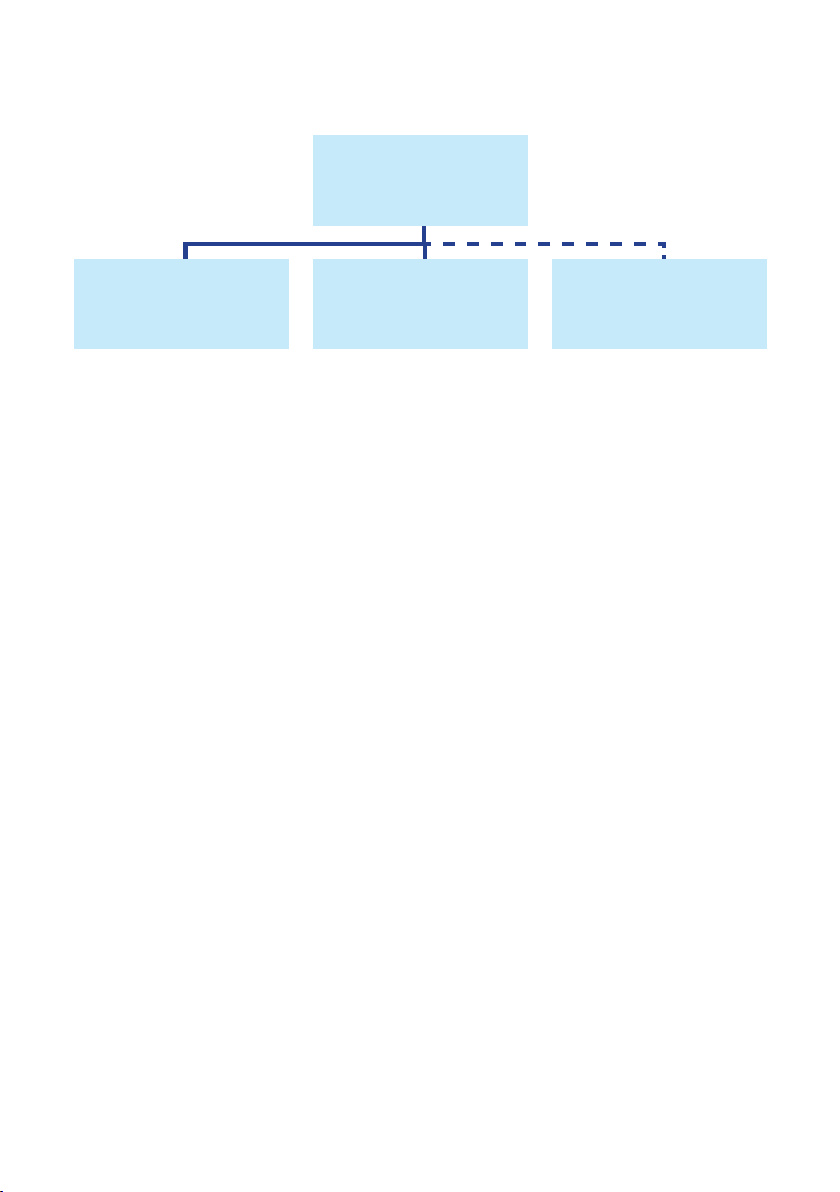
Block Diagram of full system
*Dashed line (RFU) only for
applicable for SP120R.
The SP120 display provides full
control of the autopilot system and
indicates dierent modes for heading,
course to steer and rudder angle.
The system requires a supply voltage
of 12 Volts DC.
SP120
Display
Drive
Unit
Compass RFU
(SP120R)

4 of 22 SI-TEX Marine Electronics - SP120 Autopilot
Installation of
System Components:
Ensure you have all the components
of the autopilot.
Tools required:
• Screwdrivers – at blade and
Phillips
• Side cutting pliers
• Wire strippers
• Spanners (various) or adjustable
spanner
• 70mm hole saw
• Power drill +assortment of drill bits
• Multi meter (DVM)
• Ancillaries such as tape, connecting
block, screws, cable ties, etc.
Access for wiring must be provided.
Cables have to be run to the power
switchboard, display, compass,
rudder feedback (if tted) and drive
unit.
All wiring should be kept as far
as possible from radio aerials and
aerial cables to prevent interference
to the radio and to prevent
transmitted signals from the radio
inuencing the SP120.
The compass must be mounted a
minimum distance of 1 metre form
any boat compass, radios, speakers
or other products with magnetic
properties to avoid interference.
The SP120 must have a direct
connection to power supply via a
15 amp circuit breaker or a 15 amp
fused circuit and an isolating switch.
Display Unit
Position:
The SP120 Head unit should be
mounted in a position accessible to
the steering position and protected
from direct rain or salt water
• Select a dry position
• For in dash mounting cut a 70mm
(2. 5”) hole (an optional mounting
bracket is available and may be
used for display mounting– see
your supplier)
• Drill mounting screw holes
• Mount the display using screws
supplied (304 SS – 6G)
• Fit dome plugs to cover screws
• Ensure motor (yellow) and clutch
(green) wires are not exposed
before connecting power to the
SP120
• Connect red wire to + 12 volts DC
(Positive)
• Connect black wire to - 12 volts DC
(Negative)
SP120 Display (Rear) Wiring Diagram

5 of 22SI-TEX Marine Electronics - SP120 Autopilot
Compass
Take care when handling the compass
as it is a sensitive piece of equipment.
The compass position is the most
important item in the installation of
the autopilot. Good course holding
is dependent on the compass being
free from magnetic interference and
excessive rolling or pitching.
Position:
• Select a dry position free from
magnetic interference. (Note other
side of bulkheads and deck heads
for magnetic type objects)
• Avoid positions near radios,
speakers, aerial cables or any other
current carrying cable.
• Mount the compass horizontally with
the arrow (bow) pointing in the same
direction as the boat’s bow. Use
non-magnetic screws (304 / 316
grade stainless steel)
• Run cable to SP120 display position
(keep away from other cables)
• Connect compass cable to SP120
compass socket
Compass Mounting:
Vessel Bow

6 of 22 SI-TEX Marine Electronics - SP120 Autopilot
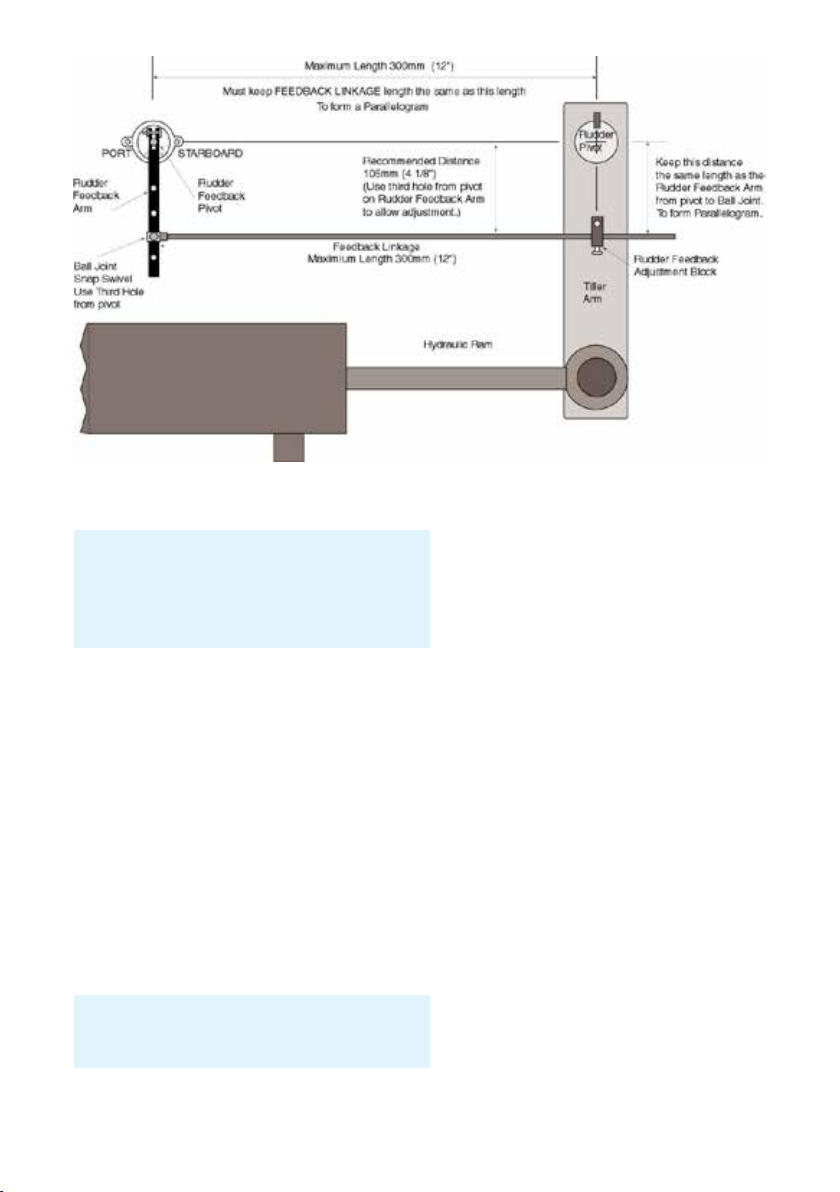
Rudder Feedback Unit
*Only for SP120R version.
The SP120R Autopilot is supplied
with an RFU (rudder feedback unit),
which provides to the pilot a precise
position of the boat rudder.
Position:
• Refer to diagram on page 8
• Mount rudder feedback adjacent
to the tiller (rudder feedback
movement must copy the angular
movement of the tiller). Use
mounting bracket if required
• Note markings on the rudder
feedback unit. P & S indicate the
required movement of the tiller
for course correction (Port and
Starboard).
• Rudder feedback is mounted with
shaft uppermost
• Fit snap lock swivel joint to rudder
feedback arm
• Fit link block to tiller arm
• Fit link arm from rudder feedback to
tiller – adjust for correct angle
• Route cable to SP120R display
position
• Connect rudder feedback cable to
SP120R rudder socket
• When installation is complete,
slowly move the steering by hand to
ensure:
a) The direction indicated on the
top of the RFU is correct
b) No undue mechanical strain
is placed on the feedback or
linkage
Note: The rudder feedback unit is
water resistant. However, if it is to
be mounted in a wet position, some
protection should be provided to
ensure the unit does not become
excessively exposed or submersed
in water.
The rudder feedback unit may be
mounted upside down, in which
case the blue and red wires in the
cable must be reversed (yellow
wire in cable is not used in the
feedback).
7 of 22SI-TEX Marine Electronics - SP120 Autopilot
Note: The rudder feedback is factory
aligned. The arm should not be
removed or loosened the shaft as this
will aect the “O” ring seal.
Rudder Feedback / GPS Wiring
Diagrams
Pin connections from rear of plug,
solder connection side. Pin 1 has
adjacent dot.
Pin 1 5V Rudder Feedback Supply
Pin 2 Rudder Feedback Wiper Return
Pin 3 0V Rudder Feedback Supply
Pin 4 TX Data (heading information)
Pin 5 + GPS Input (Positive)
Pin 6 - GPS Input (Negative)
Note: Pin locations are relative to pin
1 which always has a dot adjacent.
Rudder Feedback Installation Diagram

8 of 22 SI-TEX Marine Electronics - SP120 Autopilot
GPS Wiring Connections
Pin connections from rear of plug,
solder connection side.
Pin 5
+ GPS Input (Positive)
- white wire
Pin 6
- GPS Input (Return)
- green wire
For GPS navigation, connect the GPS
unit via the two wires coming from the
back of the rudder feedback plug on
the SP120 display unit.
Heading Data out is also available
Pin 4
+ Heading Data Out (Positive)
- red wire
Pin 3
- Heading Data Out (Negative)
- blue wire (0 volt line)
Note: For information on connecting
dierent brands of GPS units, refer
to the relevant GPS manual
Hydraulic Reversing
Motor Connection
• Route suitable two core cable (10
amp min) from motor to SP120
display
• Connect motor cable to the yellow
and yellow/black motor wires at
SP120
Notes:
1. With SP120 in MANUAL yellow
motor wires are both at + 12 VDC
2. Yellow/black wire will give
negative voltage out when port
rudder movement is required.
3. Motor direction can be checked
with SP120 in MANUAL by pressing
◄ or ► once power has been
connected to the SP120
Mechanical Reversing
Motor Connection
• Route suitable four core cable (10
amp min) from motor to SP120
display
• Connect motor wires to the yellow
and yellow/black motor wires at
SP120
• Connect one clutch wire to green
wire at SP120
• Connect second clutch wire to + 12
VDC voltage supply
Note: If a linear hydraulic drive
is used, the connections are for
mechanical drive.

9 of 22SI-TEX Marine Electronics - SP120 Autopilot
Initial Operational
Settings
The initial set up of the SP120 is
done once the system installation
is complete and power has been
connected to the SP120 display
control. The set up can be done
automatically or manually
Automatic installation set up
determines the output polarity for
motor direction and rudder limit
setting. This method can only be
used where a rudder feedback is
tted. The installation procedure is
designed to work on a rudder speed
of 8 to 20 seconds hard over to hard
over. The process may fail with faster
or slower rudder movement in which
case the manual set up should be
used.
The maximum rudder travel will be
set to approx. 33º each side in the
automatic set up.
Note: If the manual set procedure
is used both motor direction and
rudder must be set individually.
Motor Direction –
Automatic Set up
To commence:
• Switch power on to SP120
• MANUAL light is lit
• Press MODE button until display
shows InSt
• Press ◄ and ► together to start
the process
• Display will show UAIt (Wait)
• Process will take between 20 and
60 seconds to complete depending
on the speed of the motor
• If process is successful display will
show dOnE (Done)
• Press either MODE or AUTO to
cancel the installation process
• Display will show CAnC (Cancel)
• If ErrO is displayed an error has
occurred
• Check the drive output is connected
and rudder feedback is moving
• If FAIL is displayed the installation
process has not been successful
because rudder travel angle is too
narrow
• Check rudder feedback installation
Motor Direction –
Manual Set up
• Switch power on to SP120
• MANUAL light is lit
• Display indicates compass heading
– example H123
• Press ◄ Rudder should move to
port
• Press ► Rudder should move to
starboard
• If direction is incorrect, reverse the
yellow wires.

10 of 22 SI-TEX Marine Electronics - SP120 Autopilot
Sensitivity
Available on the SP120R version only.
Factory default setting is 04 and should
only be altered during seas trials
• SP120 in MANUAL
• Press MODE button until display
shows 04
• Press ► to increase setting (more
tolerance to the rudder position error)
• Press ◄ to decrease setting (less
tolerance to the rudder position error)
• Display returns to MANUAL and
shows heading after 3 seconds
Rudder Ratio
Factory default setting is 03 and should
only be altered during seas trials
• SP120 in MANUAL
• Press Mode until display shows r 03
• Press ► to increase setting (larger
rudder ratio)
• Press ◄ to decrease setting (smaller
rudder ratio)
• Display returns to MANUAL and
shows heading after 3 seconds
Note: A value of 1 signies the
minimum amount of applied rudder.
When the rudder setting is too low,
vessel track will be a slow “S” i.e. :
understeer through too little rudder
applied.
A value of 20 signies the maximum
amount of applied rudder. When the
rudder setting is too high, vessel
track will be a rapid “S” i.e. : oversteer
through too much rudder applied.
Backlighting
When using the autopilot at night, the
backlighting can be turned on.
• Press MODE four times SP120R
• Press MODE until display shows LitE
• Press e ► to increase the backlight
• Press ◄ to decrease the backlight
Set Rudder Limits
Available on the SP120R version only
• SP120 in MANUAL
• Press MODE until display shows PL -
-(port limit)
• Turn boat helm until rudder reaches
required angle - example 28º Port
• Press ◄ and ► together to save this
setting
• Press MODE again until display
shows SL - - (starboard limit)
• Turn boat helm until rudder reaches
required angle - example 28º Stbd
• Press ◄ and ► together to save this
setting
• Press AUTO to return to MANUAL
Compass Heading
• Switch on power to SP120
• Check display heading - example H
123
• Check this heading against a known
accurate bearing
• If display reading diers from known
heading*, the compass can be
calibrated.

11 of 22SI-TEX Marine Electronics - SP120 Autopilot
* Note: Compass headings rarely
agree on every heading for 360º
rotation. The compass heading is
set for optimum alignment only
Compass Calibration
To carry out this procedure the boat
must be in open waters and be able
to safely turn through 360º.
• Switch on power to SP120
• Press MODE button until display
reads CCAL
• Slowly turn boat in a circle
• Display shows dOnE when
calibration is complete
Compass Alignment
The compass may need to be aligned
with a known heading
• Loosen the two mounting screws
on the compass base plate
• Rotate compass until display reads
the same the known bearing
• Re-tighten the screws
Technical Adjustments
These procedures are used to adjust
internal parameters of the SP120.
Each routine can be set or reset and
can be displayed individually.
To enter the procedures:
• SP120 in MANUAL
• Press MODE until display shows
P-41 (if the rmware version is 41)
• Press ► to access the rst
technical parameter
• Display changes to 1- 02
• Press ◄ and ► together to entered
the rst routine
• Display changes to 1= 02
• Change the setting by pressing ◄
or ► to increase or decrease
• Press ◄ and ► together accept the
new setting
• Display changes back to 1 - 03
(example if setting was increased
by one)
• Press ► again to access the next
routine and continue as above
Press MODE or AUTO to return
SP120 to MANUAL operation.
Parameters List:
1. Pulse Drive Time
The minimum pulse width when
the autopilot is in NO RFU mode.
When the system is near to the
desired position, the pulse of
current applied to the motor will
have this length. This parameter
is not used when in RFU mode.
This parameter may be
necessary to be increased if the
rudder is not moving and the
course error of the boat is bigger
than the dead band. It depends
on the power of the system which
moves the rudder and the inertia
of the rudder. The pulse must be
long enough for start moving the
rudder.
Range: 0 to 99
Recommended: 25

12 of 22 SI-TEX Marine Electronics - SP120 Autopilot
2. Reverse Delay
Sets the delay time between
rudder movement direction
changes. The purpose of this
parameter is to prevent damage to
the system that moves the rudder
due high electrical currents.
Range: 0 to 99
Recommended: 40
3. Dead Band
Sets the tolerance in degrees
concerning the desired heading.
For example, it the desired
course is 90o and the dead band
is 1o, the control will actuate for
correcting the heading when it is
out of the interval from 89o to 91o.
The dead band can not be zero,
as there are some oscillation in
the heading readings due the
movement of the waves and the
accuracy of the compass.
Range: 0 to 50
Recommended: 5
4. Maximum Rate of Turn
It limits the rate of turn of the boat,
mainly when occur big changes in
the desired course.
The bigger the course error of
the vessel, the faster is the turn
speed calculated by the control
for correcting this error. Therefore,
it has to have a limit on this turn
speed accordingly to the type of
boat.
The number of this parameter
represents the degrees per minute
allowed.
Range: 0 to 400
Recommended: 250 (260o/min)
5. Minimum Speed in Knots
Set at 1 knot in the factory, it gives
the minimum speed acceptable for
turning on the autopilot in NO RFU
mode.
The position of the rudder will turn
the boat as expected only above
of certain speed. Therefore, it
is necessary to set a minimum
speed for the control start working.
Range: 5 to 100
Recommended: 10 (1.0 knot)
6. rF – 0: no rudder feedback mode
1: with feedback mode
When it is not provided a rudder
feedback sensor in the vessel, this
parameter must be set to 0. Whit
this information, the control will
make its calculations based only
on the heading readings
Range: 0 or 1
Recommended: 1 if there is an
RFU available
7. Integral Control Gain
Sets the integral parameter for the
PID control. It is used only when
in RFU mode. See the section
“Adjusting the PID control” below
for further information.
Range: 0 to 99
Recommended: 5
8. Derivative Control Gain
Sets the derivative parameter for
the PID control. It is used only
when in RFU mode. See the
section “Adjusting the PID control”
below for further information.
Range: 0 to 99
Recommended: 20

13 of 22SI-TEX Marine Electronics - SP120 Autopilot
rESt
General Reset – Reset all the
congurable parameters of the
device to the factory values. It
must be double pressed both
arrows ◄ ►◄ ►.
After this command is applied,
it may be required setting some
parameters again, according the
vessel.
A XTE Proportional GAin
Sets the correction factor
associated with the current
Cross Track Error value.
Care must be taken if a quick
response of the control is
desired. If this parameter is too
high, the direction of the vessel
can became oscillatory.
Range: 0 to 99
Recommended: 10
BSteer Routine;
This version is equipped with
2 steering routine parameters
that can cater for all types of
vessels. In some cases the PID
routine will cause oscillations,
so it could be recommended to
select the difernt routine.
0 is for PID.
1 is for a conventional Bang
Bang Linear system.
CWind Damping
This parameter can be set ON
(1) or OFF (0). When it is ON,
the action of the wind on the
desired course the vessel will be
compensated.
For this functionality works, it is
necessary to feed the autopilot
with the wind value information
via serial port.
Range: 0 or 1
Recommended: depends on the
availability of wind information.
DPower supply voltage
Displays the voltage of the power
supply.
ESI-TEX Use Only
F XTE Integral Multipler
Allows for adjustment of ne
control of the Steering routine.
If the vessel is not keeping on
course with a tide or large course
dierent. Then increasing this
value will help. To high a value
will cause oscillation.
Range: 0 to 99
Recommended: 5
14 of 22 SI-TEX Marine Electronics - SP120 Autopilot
G Steering Control period
Adjusts the timing routine of the
Steering PID routine. Slightly
related to the speed of the
rudder.
H Heading adjustment
In this mode you can adjust the
heading oset of the compass.
Range: -10.0 to 10.0
I Baud rate of Serial Port 1
The GPS input port. Baud rates
up to 38400 are available.
J Baud rate of Serial Port 2
The Compass input port.
Adjusting the PID control
PID stands for Proportion, Integral
and Derivative, which are the three
calculated values that when summed,
result in the adjustment value. This
value is the position to where the
Rudder must be driven.
Below it is described how each
of these values contributes to
the control of the vessel. These
value dier for the dierent vessel
setups and dierent types of rudder
feedback used.
• Proportional value:
The larger the error from the
desired direction from the current
direction of the vessel, the larger
this value is. It provides a more
responsive system when the boat is
too far from its desired direction.
However, this proportional value
may be not enough when the
vessel’s direction is being disturbed
by some force that takes it from its
route (unbalanced load, wind...).
In the autopilot, the gain
(contribution) of this value is
adjusted with the rudder ratio.
• Integral value:
This portion of the control value
integrates the error, for the
compensation of forces and
disturbances that the proportional
control value can’t cope with. It is
intended to provide no error on the
vessel’s direction result.
The adjustment of the gain for
this parameter is explained in the
sections “Technical Adjustments”
and “Parameters List” (parameter
7) above;
• Derivative value:
This value is intended for providing
stability to the system avoiding
“hunting”. It is based in the variation
of the error, in this case, how fast
the boat is turning. This value will
be zero when the vessel is not
turning, and will oppose the to the
turn movement when it happens.
The adjustment of the gain for
this parameter is explained in the
sections “Technical Adjustments”
and “Parameters List”
(parameter 8) above.
15 of 22SI-TEX Marine Electronics - SP120 Autopilot
SP120 default settings
Front panel set: Setting Range
Rudder Ratio 3 1-40
Sensitivity 4 0-10
Parameters: Setting Range
1. Pulse Length 25 0 to 99
2. Reverse Delay 40 0 to 99
3. Dead Band 5 (1o) 0 to 50
4. Maximum Rate of Turn 250 (250o/min) 0 to 400
5. Minimum Speed 1.0 (knot) 5 to 100 (0.5 to 10 knots)
6. No RFU rf – 1 0 or 1
7. Integral Control Gain 5 0 to 99
8. Derivative Control Gain 3 0 to 99
A. XTE Proportional Gain 10 1 to 99
B. Not used -- --
C. Wind damping 0 0 or 1
F. XTEInegral Gain Multiplier 3 0 to 99
G. Control Calculation Period 60 0 to 99
H. Heading oset. 0 -10.0 to +10.0
I. Baud Rate GPS 4800 4800 - 57600
J. Baud Rate Compass 4800 4800 - 57600

16 of 22 SI-TEX Marine Electronics - SP120 Autopilot
Setting up your GPS Unit
Because there are a great variety
of GPS units that will work with this
autopilot, the following is a guide only.
For more information, consult your
GPS manual.
The GPS unit must be set up to
output “NMEA 0183” data on a pair
of wires, which are connected to the
SP120 unit via the rudder feedback
connector. The data generated must
include at least one of the following:
• The APA sentence.
• The APB sentence.
• The BOD and XTE sentences.
• If only the XTE data sentence is
available, the pilot can steer in a
restricted manner only. (See later in
this section.**)
The GPS unit must be programmed
and activated to navigate to a
waypoint, or to follow a line joining
two or more waypoints (called a
route). This unit should then send
information to the autopilot from
which can be calculated the course-
to-steer.
Under the following conditions:
• several waypoints are linked
together into a single route,
• the GPS unit is set and capable of
“auto-sequence” between them,
• an “arrival zone” of more than 0.
05 NM (Nautical Miles) is set so
that the GPS can detect when the
vessel has reached a waypoint;
then the SP120 will be able to steer
from each waypoint to the next
without intervention.
** If only the XTE information is
available from your GPS unit then
your vessel must be on track, and
heading in the correct direction,
before engaging the GPS unit.
The “auto sequence” feature is not
available in this instance.
Note: Prior to engaging GPS
mode, a route or destination must
be programmed and selected in
the GPS for the Autopilot to follow.
SP120 Alarms
A number of conditions will cause
alarms to sound and an alarm
message to ash on the display
O Course Alarm
In AUTO mode an audible alarm of 3
“beeps” per second will sound when
boat heading is greater than 45º from
the desired course. The ALARM light
will also ash RED on and o.
GPS Alarm
In Waypoint Steering mode an
audible alarm of 1 “beep” per second
will sound when no GPS data is
received by the SP120. The ALARM
LED will ash RED and GPS light will
also ash RED / GREEN.

17 of 22SI-TEX Marine Electronics - SP120 Autopilot
Denition of Terms
SP120 Display: The operational
control unit with LCD display and
push buttons.
Heading: This is the magnetic
direction of the vessel at the current
time.
Course-to-steer: The direction
(heading) which the autopilot is
attempting to maintain.
*Note: If there is no compass
connected and a GPS is used as
heading reference, the display
shows COG (course over ground).
Overview of Operation
MANUAL Mode: “H***”
The autopilot display unit shows the
current heading. The Manual LED will
show YELLOW.
The boat is under manual steering
control; the autopilot will not apply
any automatic steering control.
Vessel can be steered using ◄ or ►
Buttons or original wheel / lever etc.
When vessel is steered, the Manual
LED will indicate drive direction.
AUTO Mode: “A***”
The autopilot will maintain your
vessel on the course indicated. The
Auto LED will be YELLOW. This
course can be set or altered from the
display unit. If drive is required. The
Auto LED will Show GREEN / RED.
WAYPOINT (SPG) Mode: “A***
When receiving information from a
GPS plotter, the autopilot can steer
a vessel to a precise latitude and
longitude (waypoint) or through a
sequence of latitudes and longitudes
(route).
WIND Mode: “S***” or “P***”
When receiving information from a
Wind Direction System, the autopilot
can steer a vessel based on the wind
direction. This is especially useful for
sailboats.
*** Will be the displayed number for
heading etc.

18 of 22 SI-TEX Marine Electronics - SP120 Autopilot
Testing Procedure
Initial Inspection and Testing
1. Conrm power to be connected is the required DC voltage.
2. Power Supply 12V DC is available.
3. Ensure polarity of the voltage supply is correct.
4. All electrical connections are correct.
5. Loose cables are clipped or tied up.
Dockside Tests
1. Turn steering wheel fully clockwise and visually check that moving
(mechanical) parts do not foul;
2. Repeat step 1 for anti-clockwise.
3. Return Steering to centre.
4. Switch on SP120 Autopilot system.
5. Press arrow button to operate steering in that direction
6. Check that rudder moves in correct direction
7. Check Rudder direction follows change request
8. Check Course change provides sucient Rudder movement
9. Check magnetic heading display on SP120
10. Return steering to centre
Other manuals for SP120
1
Table of contents
Other Sitex Marine Equipment manuals








Popular Marine Equipment manuals by other brands







E2S
E2S SONF1 Series Instructions/service manual

Bennett
Bennett HIGH FLOW H35 instruction manual

Maretron
Maretron MBB300C user manual

AML Oceanographic
AML Oceanographic MVP30 Operator's guide

FM Electronics
FM Electronics WSAB1 Installation and programming guide

Standard Horizon
Standard Horizon DS41 owner's manual





