HYDROVERT V20 USER MANUAL Version 2.1 dated 10-08-2017
3
1 – INTRODUCTION
HYDROVERT V20 is a new inverter model with built-in EMC filter in compliance with 2004/108/EC
(Electromagnetic Compatibility) and 2006/95/EC (Low Voltage) Directives, fitted with special software for
hydraulic systems, which can operate with both old and new control units.
Controls only the UPWARD run phase.
The following advantages are attained:
•No peak currents. The maximum start-up current is the nominal current.
•Possibility of setting a network maximum input power limit, to contain the contractual power.
•Reduction of consumptions.
•Optimisation of run comfort.
•Power factor correction of the network input power. Cosϕ
ϕϕ
ϕ0.98.
•Possibility of selecting the inspection speed value.
HYDROVERT V20 is available for motors with maximum input current up to 27A.
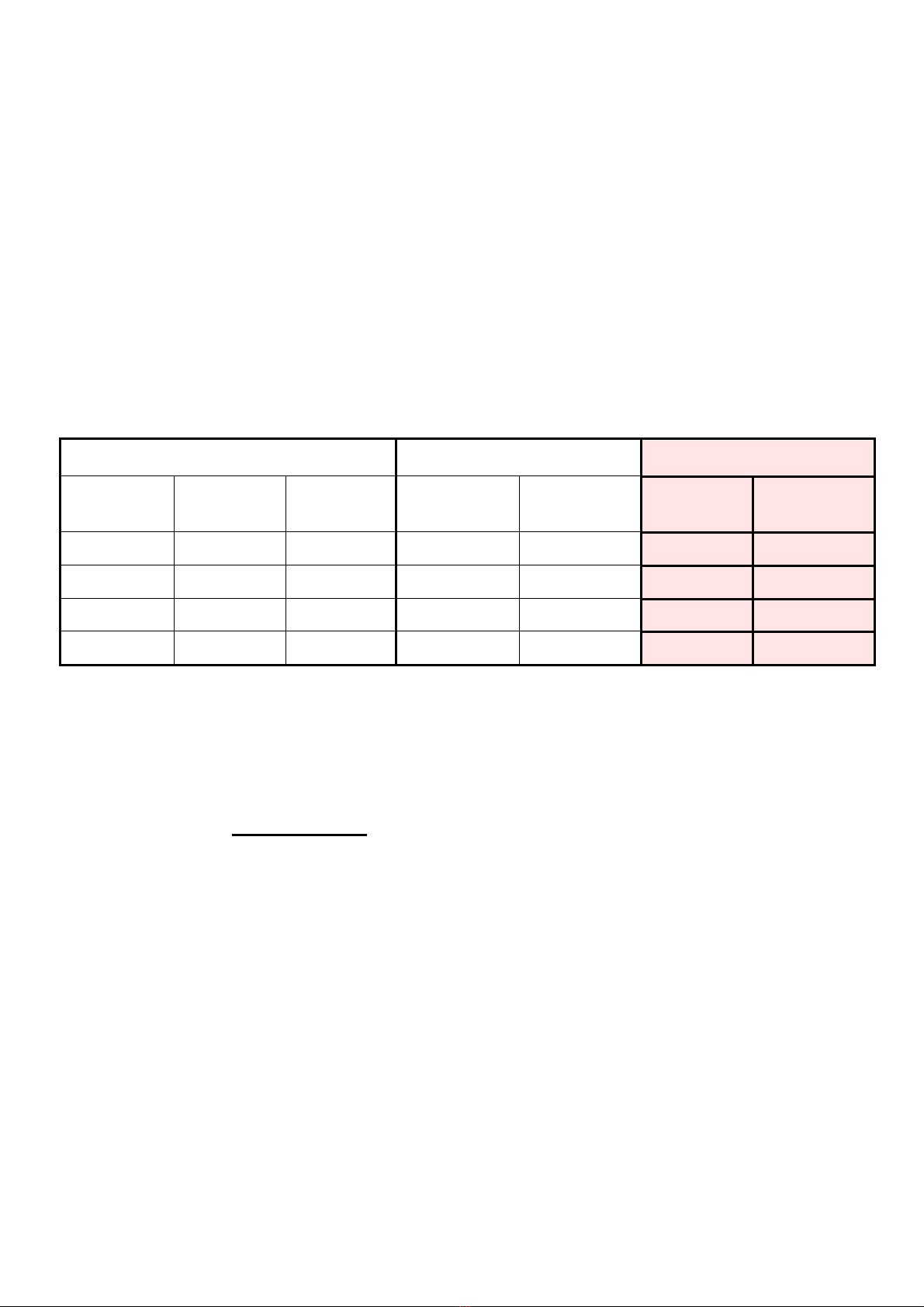
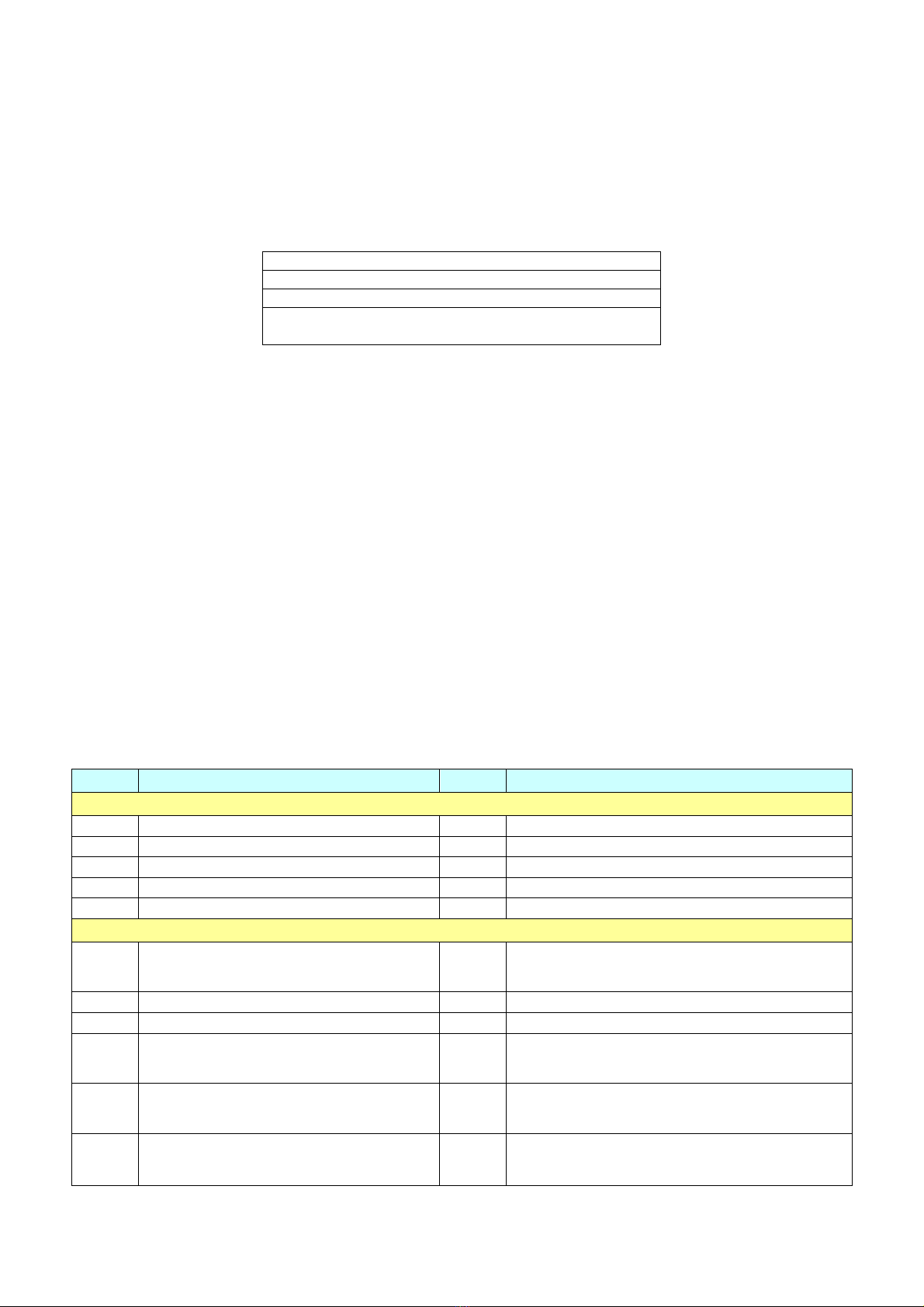
A TABLE is given successively, which states the indicative INPUT POWER and ENGAGED POWER values
that can be obtained with HYDROVERT V20, highlighting the possible saving with respect to the application
of a simple SOFT STARTER.
MOTOR DATA
(kW)
(kW)
PLATE
POWER
(kW)
NOMINAL
CURRENT
(A)
MAXIMUM
CURRENT
(A)
With
NOMINAL
current
With
MAXIMUM
current
SOFT
STARTER HYDROVERT
2.2 7.1 9 3.9 5 6 4.5
3 8.6 11 4.7 6 6 4.5
4.7 13 16 7.2 8.8 10 6
6 15 21 8.3 11.6 15 6
TABLE 1 – Input Power and Engaged Power
2 – RECOMMENDATIONS AND PRECAUTIONS
For everything that concerns the recommendations relative to personal safety and to prevent accidental
damage to the product or equipment connected to it, refer to the “SAFETY” chapter in the original
VACON INSTALLATION AND MAINTENANCE TECHNICAL MANUAL (VACON 20 Cold Plate series
inverter) available at www.it.vacon.com, where the “Declaration of Conformity”, given on the last page of
this document, is also present.
Read this manual completely before powering the appliance.
Regarding specific application on elevators, also carefully consider the following points:
1- The inverter leakage current to earth is over 30mA, a residual current device must therefore be
envisioned with I
d
no less than 300mA; type B or type A. For the earth connection, the regulations
prescribe a cable with minimum section of 10 mm².
If, on closing the master switch, the RCD intervenes, do not repeat the operation several times
successively because the inverter could undergo permanent damage.
2- To prevent damage to the inverter in the event of prolonged standstill without power supply,
before re-starting it is necessary:
- If the inverter is at a standstill for several months, power it for at least 1 hour in a way to
regenerate the bus condensers.
- If the inverter is at a standstill for more than 1 year, power it for 1 hour with voltage that is 50%
lower than the nominal voltage and then for 1 hour at nominal voltage.