shaft synchronization application vacon • 3
24-hour support +358 (0)40 837 1150 • Email: vacon@vacon.com
Vacon shaft synchronization application manual
INDEX Document code: ud01115B
Date: 26.10.2006
1. Introduction ....................................................................................................................... 5
1.1 Requirements ............................................................................................................................. 6
1.2 Trial Time period......................................................................................................................... 6
2. Control I/O ......................................................................................................................... 7
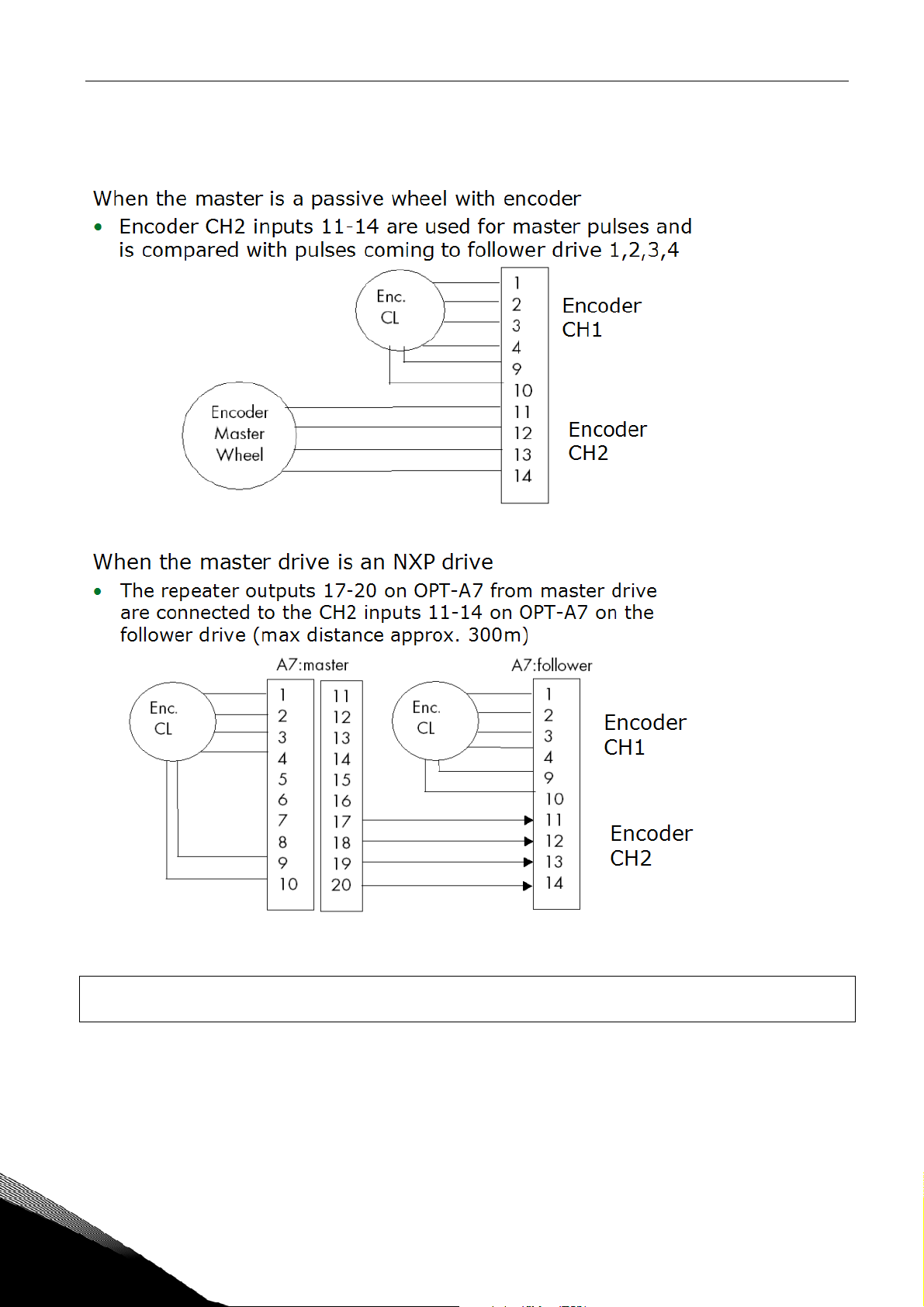
3. Connection of signals between master and follower drive (OPT-A7) ................................. 8
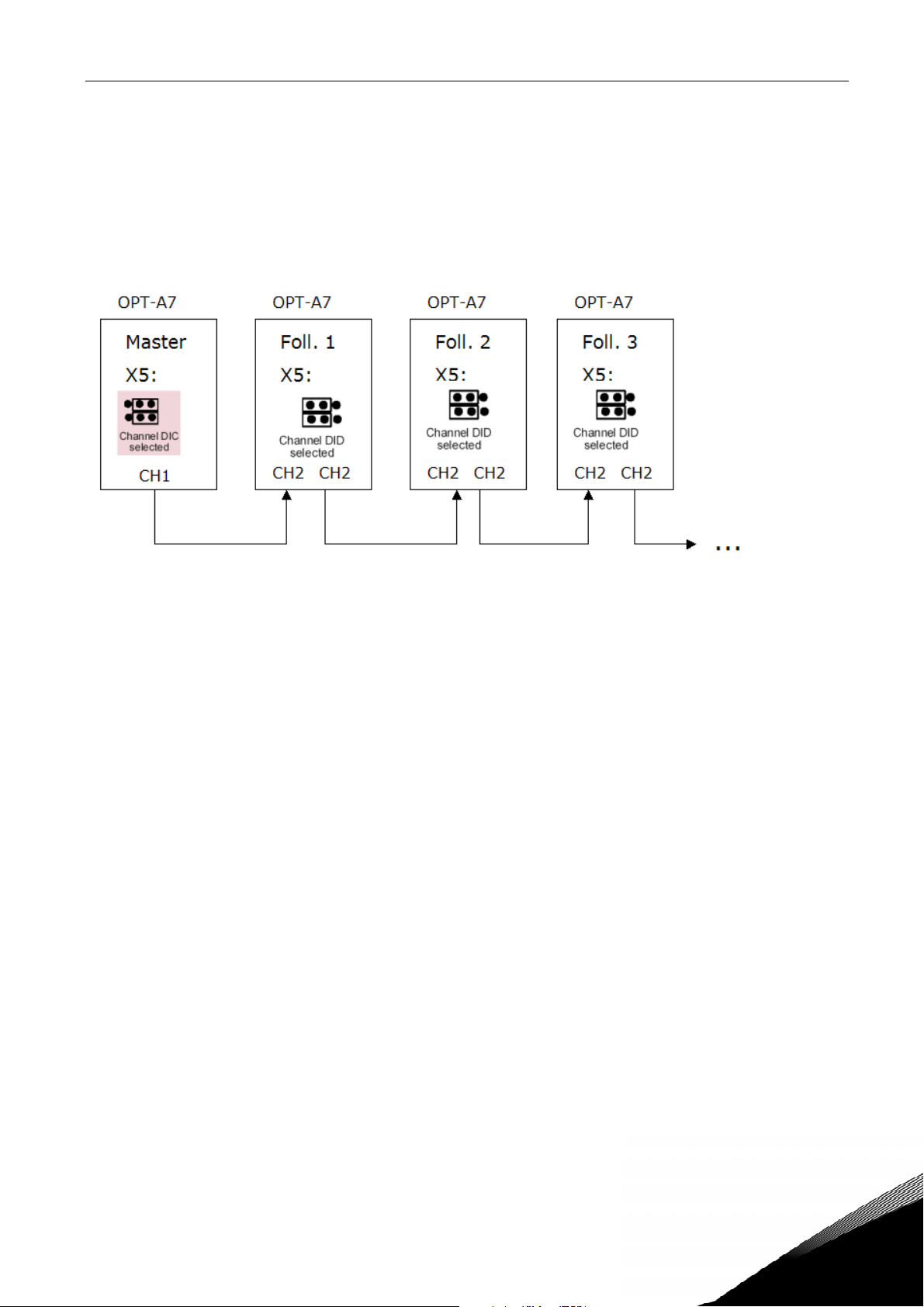
4. Jumper setting on the OPT-A7 board................................................................................. 9
5. “Terminal To Function” (TTF) programming principle ..................................................... 10
5.1 Defining an input/output for a certain function on keypad ..................................................... 10
5.2 Defining a terminal for a certain function with NCDrive programming tool.......................... 11
5.3 Defining unused inputs/outputs............................................................................................... 12
6. Shaft Synchronization Application – Parameter lists....................................................... 13
6.1 Monitoring values (Control keypad: menu M1)........................................................................ 13
6.2 Basic parameters (Control keypad: Menu M2 G2.1) ........................................................... 14
6.3 Input signals.............................................................................................................................. 15
6.3.1 Basic settings (Control keypad: Menu M2 G2.2.1) .................................................... 15
6.3.2 Analogue input 1 (Control keypad: Menu M2 G2.2.2)................................................ 15
6.3.3 Analogue input 2 (Control keypad: Menu M2 G2.2.3)................................................ 16
6.3.4 Free analogue input, signal selection (Keypad: Menu M2 G2.2.4) ........................... 16
6.3.5 Digital inputs (Control keypad: Menu M2 G2.2.5)...................................................... 17
6.4 Output signals........................................................................................................................... 18
6.4.1 Delayed digital output 1 (Keypad: Menu M2 G2.3.1) ................................................. 18
6.4.2 Delayed digital output 2 (Keypad: Menu M2 G2.3.2) ................................................. 18
6.4.3 Digital output signals (Control keypad: Menu M2 G2.3.3) ........................................ 19
6.4.4 Limit settings (Control keypad: Menu M2 G2.3.4)..................................................... 20
6.4.5 Analogue output 1 (Control keypad: Menu M2 G2.3.5) ............................................. 21
6.4.6 Analogue output 2 (Control keypad: Menu M2 G2.3.6) ............................................. 21
6.4.7 Analogue output 3 (Control keypad: Menu M2 G2.3.7) ............................................. 22
6.4.8 Mechanical Brake (Control keypad: Menu M2 G2.3.8).............................................. 22
6.5 Drive control parameters (Control keypad: Menu M2 G2.4)............................................... 23
6.6 Motor control parameters (Control keypad: Menu M2 G2.5).............................................. 24
6.6.1 PMSM settings (Control keypad: Menu M2 G2.5.19)................................................. 25
6.7 Protections (Control keypad: Menu M2 G2.6)...................................................................... 26
6.8 Fieldbus parameters (Control Keypad: Menu M2 G2.7) ...................................................... 28
6.9 Torque control parameters (Control Keypad: Menu M2 G2.8) ............................................ 29
6.10 Shaft synchronization parameters (Control keypad: Menu M2 G2.9) ................................ 30
6.11 License key (Control keypad: Menu M2 G2.10) ................................................................... 31
6.12 Keypad control (Control keypad: Menu M3)............................................................................. 31
6.12.1 System menu (Control keypad: Menu M6)................................................................. 31
6.12.2 Expander boards (Control keypad: Menu M7) ........................................................... 31
7. Description of parameters ............................................................................................... 32
7.1 Keypad control parameters...................................................................................................... 85