Vacon Plc Phone: +358-(0)2012121 Fax: +358-(0)201 212 205
Page 2 VV
VV
Vaconacon
aconacon
acon
Multi-purpose Control Application IIMulti-purpose Control Application II
Multi-purpose Control Application IIMulti-purpose Control Application II
Multi-purpose Control Application II
Reference
potentiometer
2 Control I/O2 Control I/O
2 Control I/O2 Control I/O
2 Control I/O
READY
RUN
220
VAC
FAULT
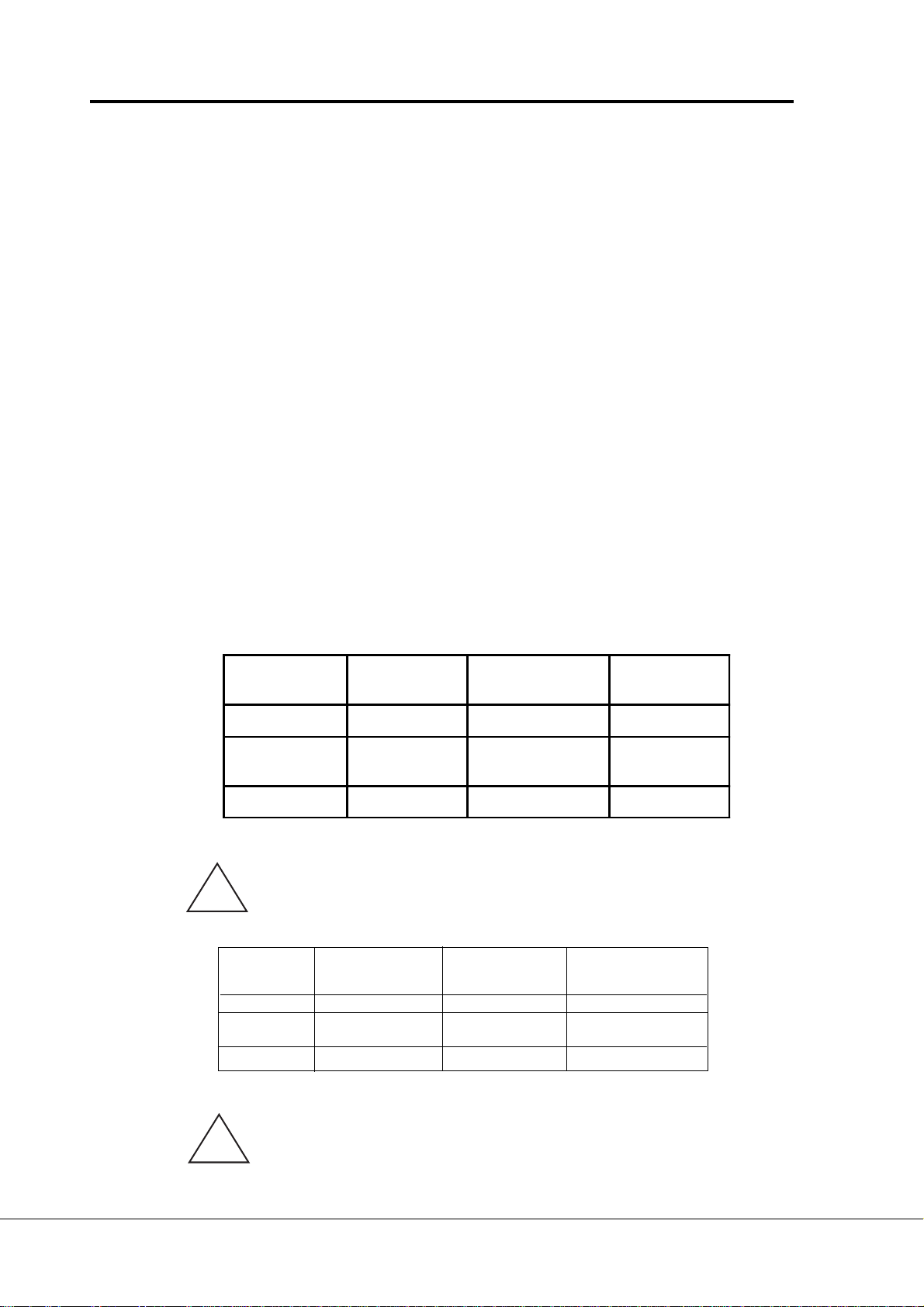
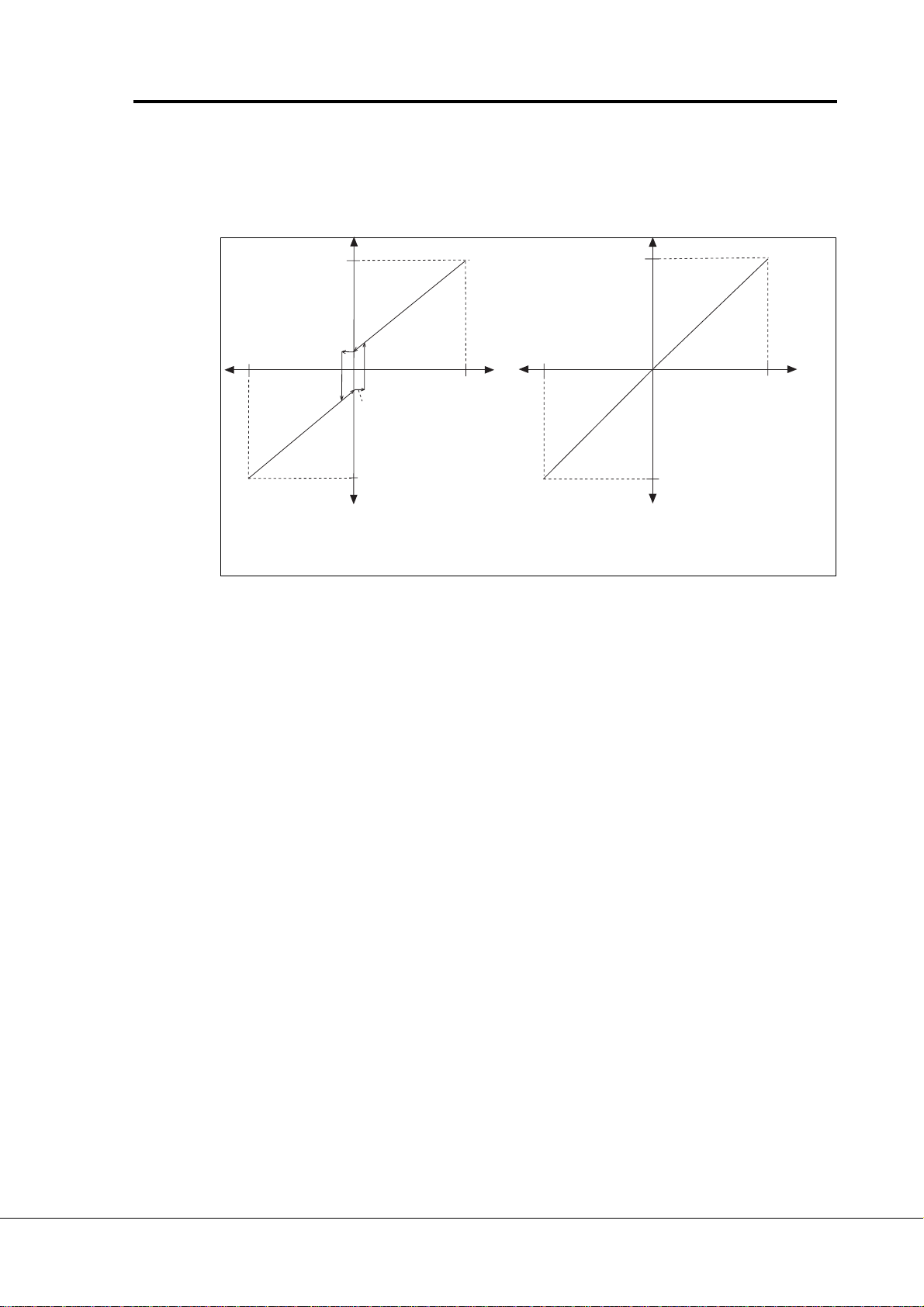
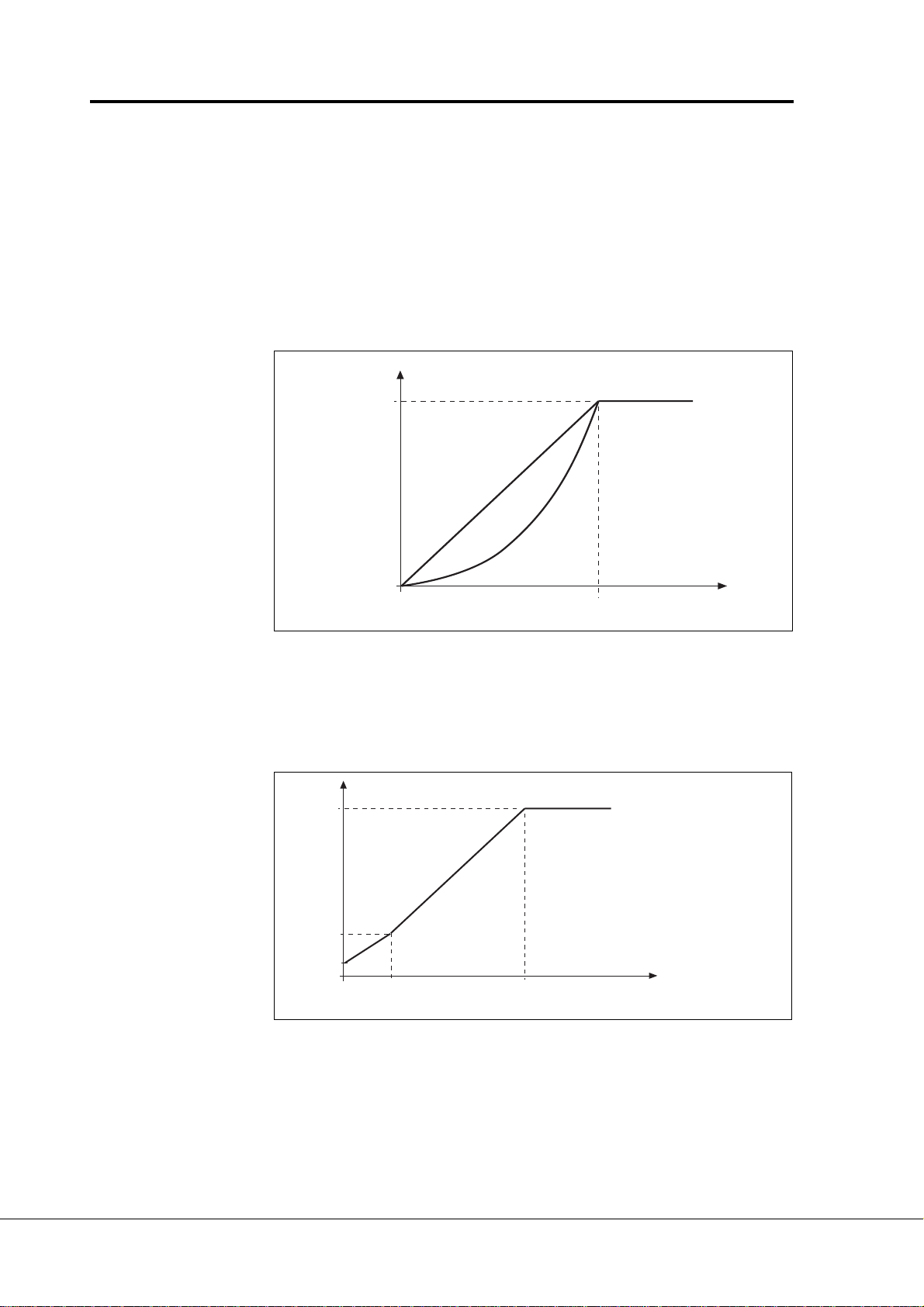
Frequency reference, analogue and digital
outputs have extra alternatives in their control
parameters. Source of free analogue input can
now be selected from the I/O Expander. These
inputs have also parameters for signal area
etc. programming.
11
11
1GeneralGeneral
GeneralGeneral
General
Multi-purpose II application is an extender
version of the normal Multipurpose application.
It has parameters for torque control and,
furthermore, for Fieldbus communication.
Following fieldbuses are supported: Interbus,
Modbus, Profibus, LonWorks, CAN-bus
(SDS, DeviceNet).
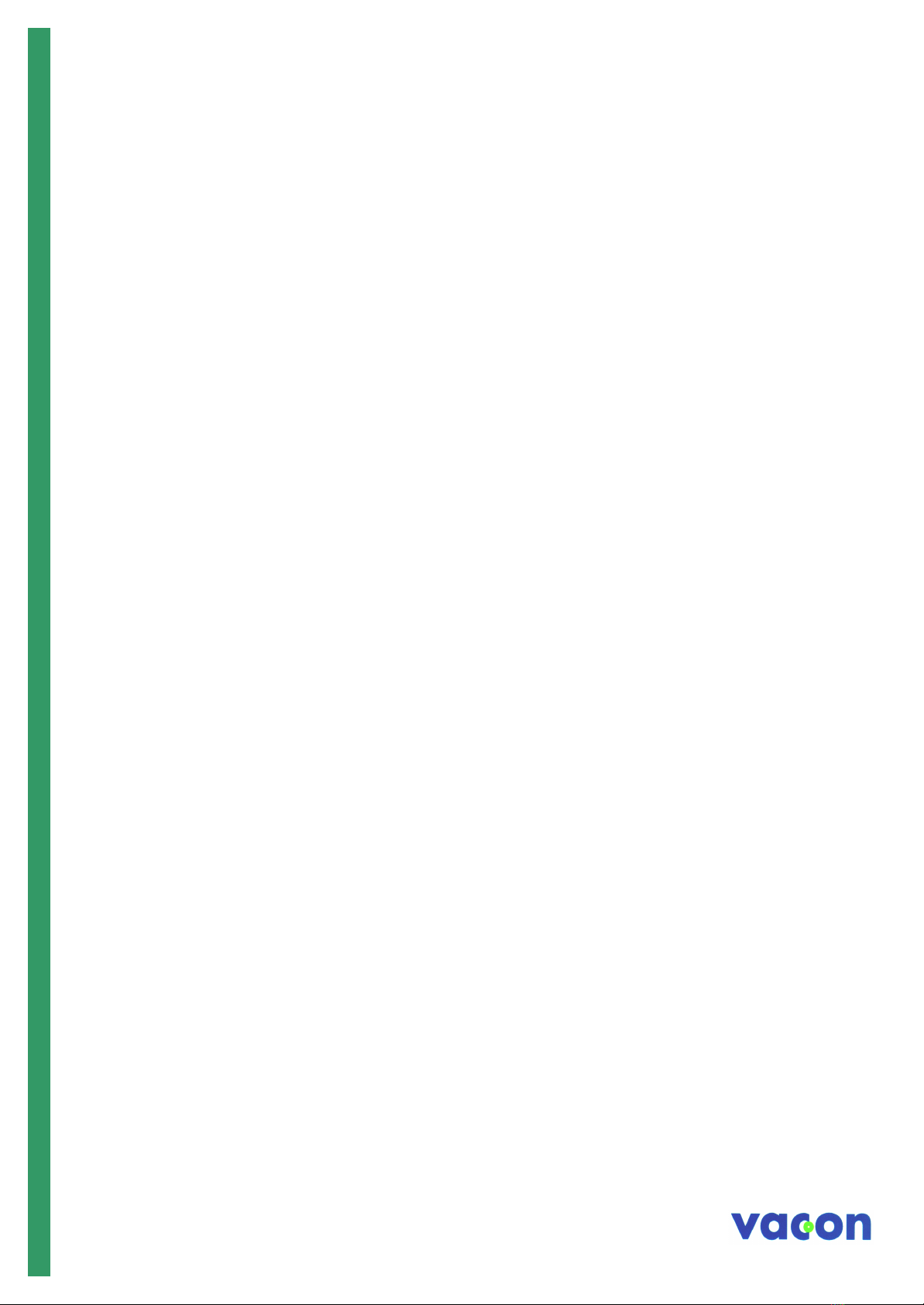
Terminal Signal Description
1 +10Vref Reference output Voltage for a potentiometer, etc.
2U
in+ Analogue input, Frequency reference
voltage (programmable) range 0—10 V DC
3 GND I/O ground Ground for reference and controls
4I
in+ Analogue input, Default setting: not used
5I
in- current (programmable) range 0—20 mA
6 +24V Control voltage output Voltage for switches, etc. max. 0.1 A
7 GND I/O ground Ground for reference and controls
8 DIA1 Start forward Contact closed = start forward
(programmable)
9 DIA2 Start reverse Contact closed = start reverse
(Programmable)
10 DIA3 Fault reset Contact open = no action
(programmable) Contact closed = fault reset
11 CMA Common for DIA1—DIA3 Connect to GND or + 24V
12 +24V Control voltage output Voltage for switches, (same as #6)
13 GND I/O ground Ground for reference and controls
14 DIB4 Jogging speed select Contact open = no action
(programmable) Contact closed = jogging speed
15 DIB5 External fault Contact open = no fault
(programmable) Contact closed = fault
16 DIB6 Accel./deceler. time select Contact open = par. 1.3, 1.4 in use
(programmable) Contact closed = par. 4.3, 4.4 in use
17 CMB Common for DIB4—DIB6 Connect to GND or + 24V
18 Iout+ Output frequency Programmable (par. 3..
..
.1)
19 Iout- Analogue output Range 0—20 mA/RLmax. 500 Ω
20 DO1 Digital output Programmable (par. 3..
..
.6)
READY Open collector, I<50 mA, U<48 VDC
21 RO1 Relay output 1 Programmable (par. 3..
..
.7)
22 RO1 RUN
23 RO1
24 RO2 Relay output 2 Programmable (par. 3..
..
.8)
25 RO2 FAULT
26 RO2
Figure 2-1 Default I/O configuration and connection example of the
Multi-purpose Control Application.