www.ydlidar.com Copyright 2015-2019 EAI
CONTENTS
WINDOWS USAGE GUIDE..........................................................2
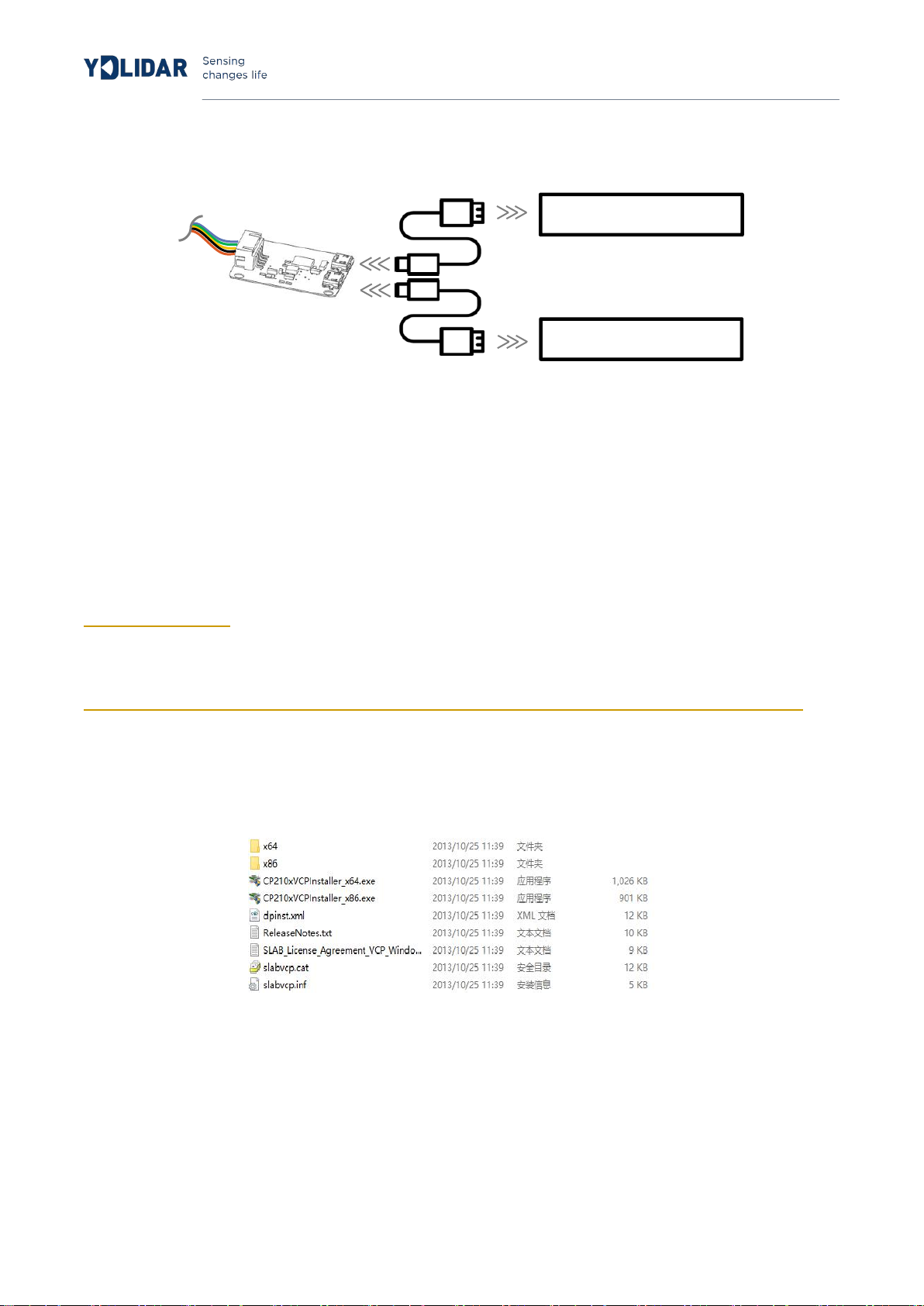
Device connection........................................................................ 2
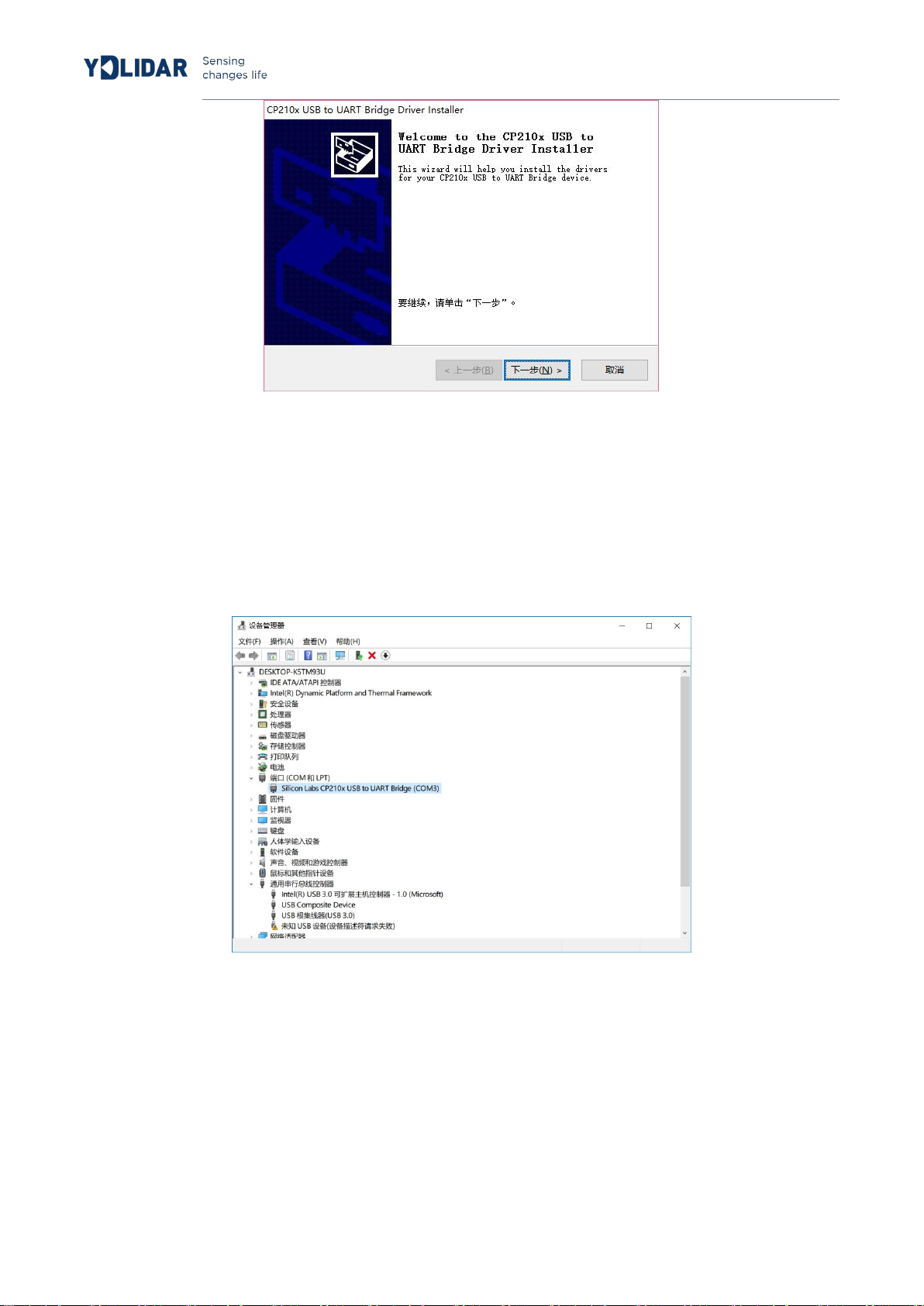
Driver Installation..........................................................................3
Evaluation software......................................................................4
Start scanning.............................................................................6
System settings.......................................................................... 6
Save data.....................................................................................7
Angle calibration.........................................................................7
Firmware upgrade......................................................................8
LINUX ROS OPERATION.............................................................9
Device connection........................................................................ 9
ROS Driver Installation................................................................9
RVIZ installation............................................................................9
RVIZ Check the scan results................................................... 10
Modify the scan angle problem................................................10
Precautions for use...................................................................... 11
Temperature................................................................................11
Ambient lighting.......................................................................... 12
Power demand............................................................................12
Revision.......................................................................................... 12