2
CONTENT
1. TROUBLESHOOTING............................................................................................................................................... 3
1.1. THE INDIGO DOESN'T MOVE OR SUCK UP ANY LITTER.............................................................................................. 3
1.2. WALL CLIMBING .................................................................................................................................................... 3
1.3. ROBOT TILTS BACKWARD ...................................................................................................................................... 4
1.4. ROBOT EMERGING ABOVE THE WATER LINE............................................................................................................ 4
1.5. BAD ADHESION TO POOL BOTTOM ......................................................................................................................... 5
1.6. NO MOVEMENT –SUCTION OK ............................................................................................................................... 5
1.7. FILTRATION INEFFECTIVE....................................................................................................................................... 6
2. ASSEMBLY / DISASSEMBLY .................................................................................................................................. 7
2.1. TOOLS REQUIRED ................................................................................................................................................... 7
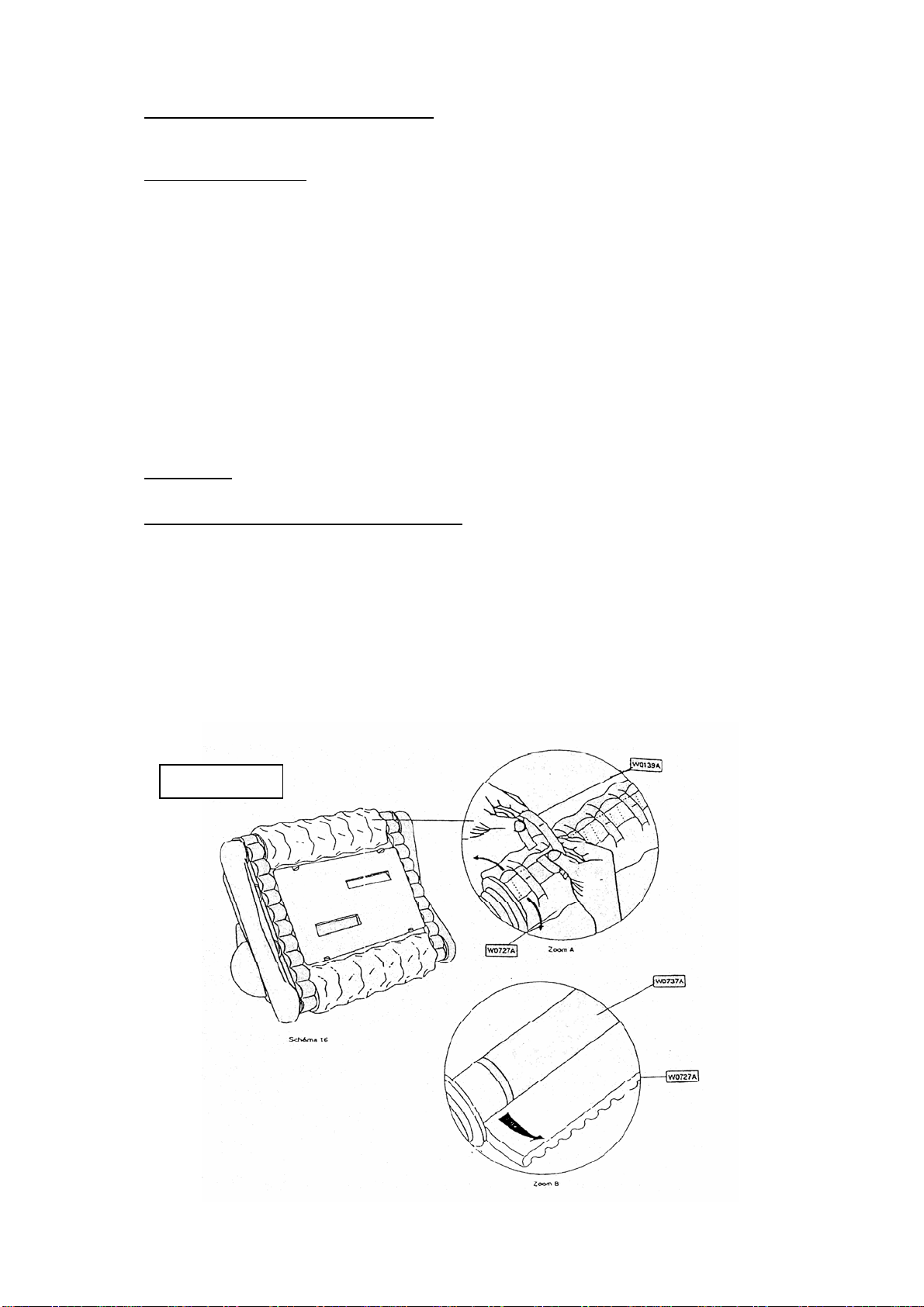
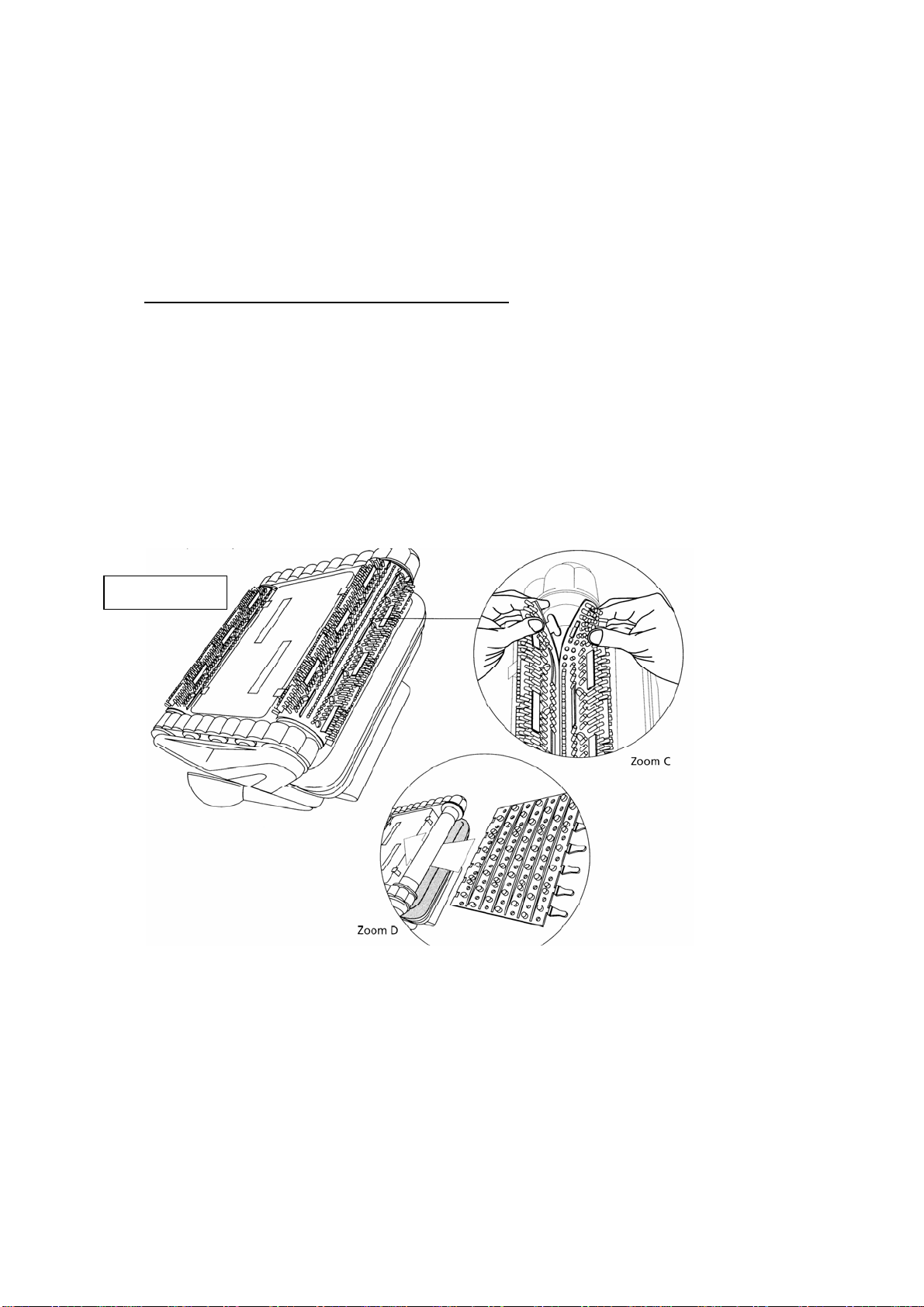
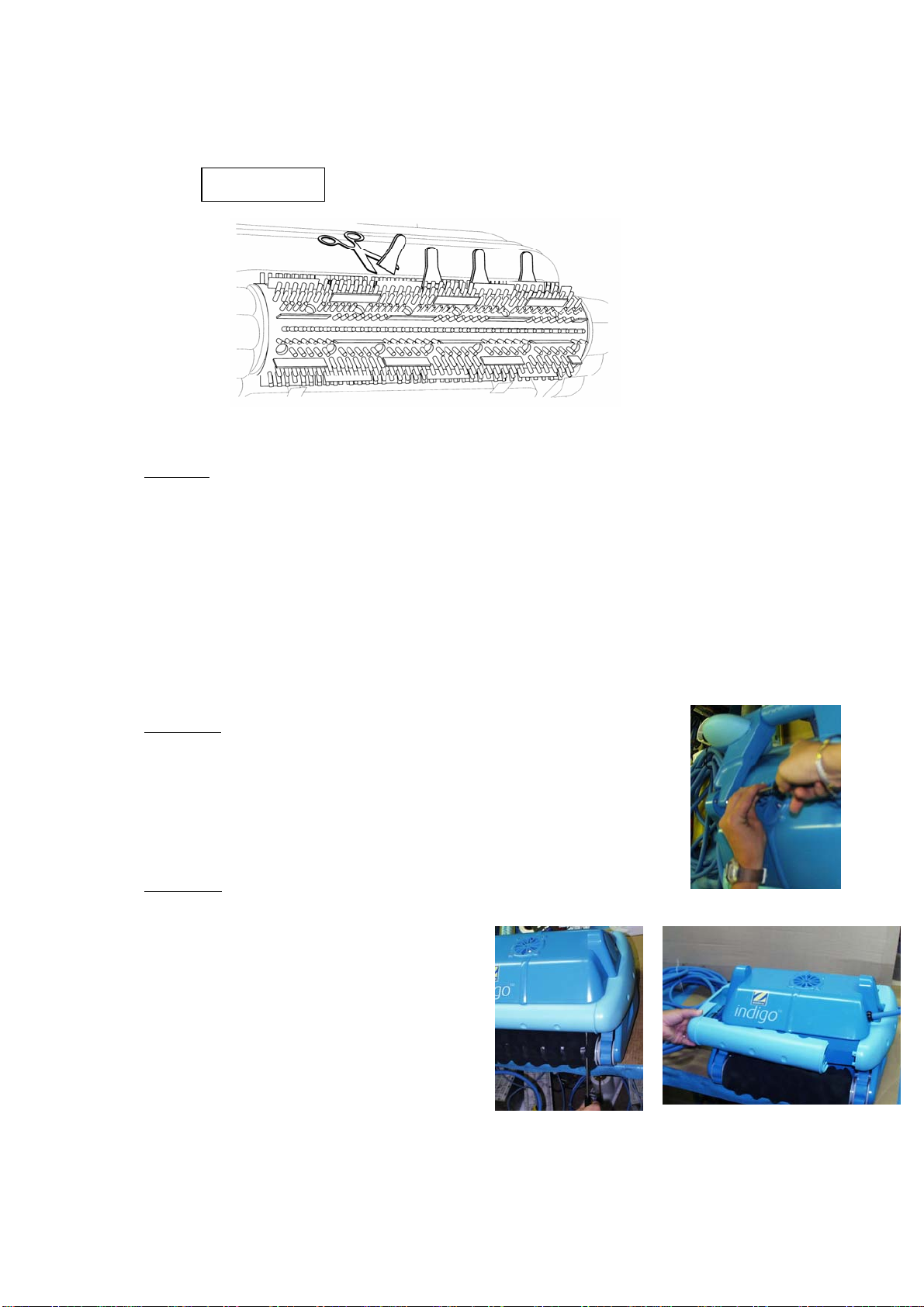
2.2. BRUSHES ................................................................................................................................................................ 7
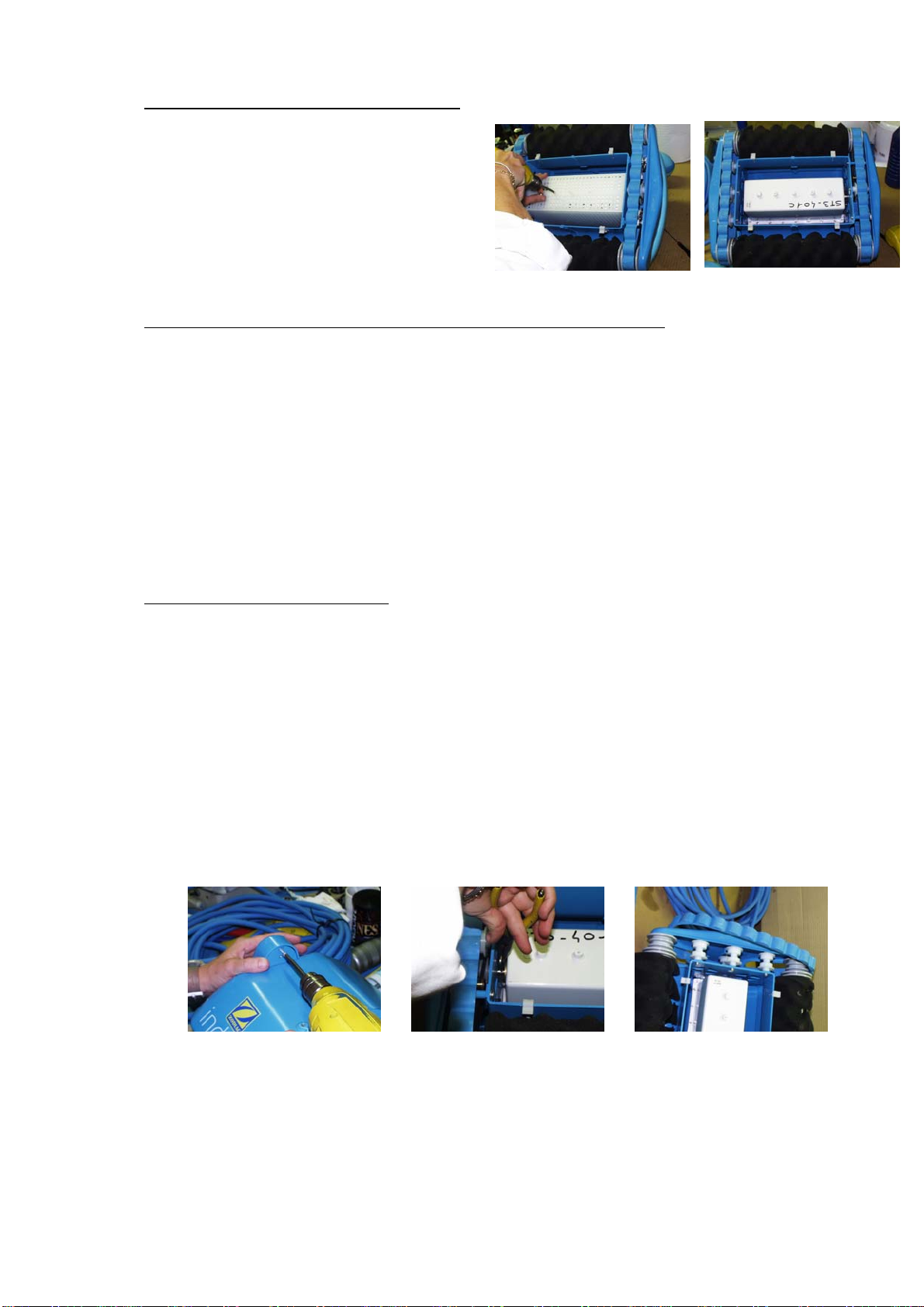
2.2.1. Your robot is fitted with foam pads............................................................................................................... 7
2.2.2. Your robot is fitted with rubber brushes....................................................................................................... 8
2.3. ROTOR.................................................................................................................................................................... 9
2.4. HANDLE.................................................................................................................................................................. 9
2.5. BUMPER.................................................................................................................................................................. 9
2.6. MOTOR UNIT PROTECTIVE SCREEN ...................................................................................................................... 10
2.7. TRACK PLATE ON TRACTION SIDE (SIDE OPPOSITE CABLE)................................................................................... 10
2.7.1. Removal of the Track Plate......................................................................................................................... 10
2.7.2. Track........................................................................................................................................................... 11
2.7.3. Drive Roller – Transmission Belt – Track .................................................................................................. 11
2.7.4. Track Plate.................................................................................................................................................. 12
2.7.5. Belt Tension Jacks....................................................................................................................................... 12
2.7.6. Belt Settings................................................................................................................................................. 12
2.7.7. Fitting the Traction Track Plate (side opposite cable) ............................................................................... 12
2.8. CABLE SIDE TRACK PLATE................................................................................................................................... 13
2.8.1. Removing the Cable-Side Track Plate ........................................................................................................ 13
2.8.2. Track Guide Roller Track ........................................................................................................................... 14
2.8.3. Track Plate.................................................................................................................................................. 14
2.8.4. Plate Assembly (cable side) on the Housing............................................................................................... 14
2.9. MOTOR UNIT ........................................................................................................................................................ 14
2.9.1. Removing the Motor Unit............................................................................................................................ 15
2.9.2. Replacing the Motor Unit ........................................................................................................................... 15
3. TECHNICAL DIAGRAMS....................................................................................................................................... 17
3.1. GENERAL DIAGRAM ............................................................................................................................................. 17
3.2. TROLLEY (W1210A)............................................................................................................................................ 18
3.3. MOTOR UNIT (W1287A)....................................................................................................................................... 19
3.4. CONTROL UNIT (W1207A) ................................................................................................................................... 21
3.5. HOUSING (W1286A) ............................................................................................................................................ 22
3.6. MOTOR HOUSING COVER (W0684A) .................................................................................................................... 23
3.7. FLEXIBLE LEAD KIT (W1313A) ............................................................................................................................ 24
3.8. PUMP MOTOR (W1290A)...................................................................................................................................... 25
3.9. GEARED TRACTION MOTOR (W1166A)................................................................................................................. 26
3.10. FILTER HOLDER (W1201A) .................................................................................................................................. 27
4. PARTS LIST............................................................................................................................................................... 28
5. CONTACT INDIGO TECHNICAL DEPARTMENT........................................................................................... 30