10
5. Click on the ALL UP button.Verify that the selected cylinder is
moving. If no movement is observed at the selected cylinder,
check to see if movement has occurred at another cylinder.
Movement of a cylinder other than the one selected indicates
incorrect electrical or hydraulic connections. NOTE: When a
system is assembled, for the first time, some cylinder
movement may occur when the manifold valve is not actuated.
This indicates that there is air present in the line, See No. 7.
Check all electrical and hydraulic circuits to make sure cables
and hoses are plumbed correctly. If the cylinder operation is
opposite from the direction selected, check for reversed hose
plumbing from the manifolds to the cylinder and from the
pump to the manifolds.
6. When proper cylinder control has been achieved, deselect the
cylinder by clicking onto the box. Continue testing all
remaining cylinders.
7. The hydraulic system must be bled of air to ensure smooth
load movement. Use the pump mounted valve to prefill all of
the hoses at the same time. Using the manual mode, bleed
each cylinder by extending and retracting the cylinder full
stroke several times. If possible, cylinders should be laying
down with the couplers pointing upward. The preferred
method of bleeding is with the hydraulic pump on a level
higher than the cylinders, allowing the air to rise to the pump
reservoir. Avoid building pressure in the cylinder during this
procedure to prevent cylinder damage.
8. After the system has been completely purged of air, set the
system relief valves. Rotate the PRESSURE RELIEF VALVE
handles counterclockwise until minimum spring resistance is
encountered to reduce the initial pressure setting. Manually
advance any cylinder to full stroke and continue while
adjusting the V-152 pressure relief valve in the advance circuit
to the desired pressure by rotating the handle clockwise. DO
NOT EXCEED THE RECOMMENDED LIMITS 8,800–9,200
psi (607-634 bar). Manually retract the cylinder to full stroke
and continue while adjusting the V-152 pressure relief valve in
the retract circuit to the desired pressure by rotating the
handle clockwise. DO NOT EXCEED THE RECOMMENDED
LIMITS 1,800-2,000 psi (124 - 138 bar).
9. Position all cylinders under the load. Cylinders must be placed
on firm foundations and plunger saddles must have full
contact with the load.
CAUTION:
The system components are designed to 10,000 psi
(700 bar). Exceeding this pressure could cause system
failure and damage to system components.
Retract pressure must be limited to 1,800-2,000 psi (124 – 138
bar). Failure to do so may cause system failure and/or
damage to system components.
Route cables and hoses in a safe manner. Do not step on
cables. Keep cables dry and protected from abrasion and
direct exposure to moisture.
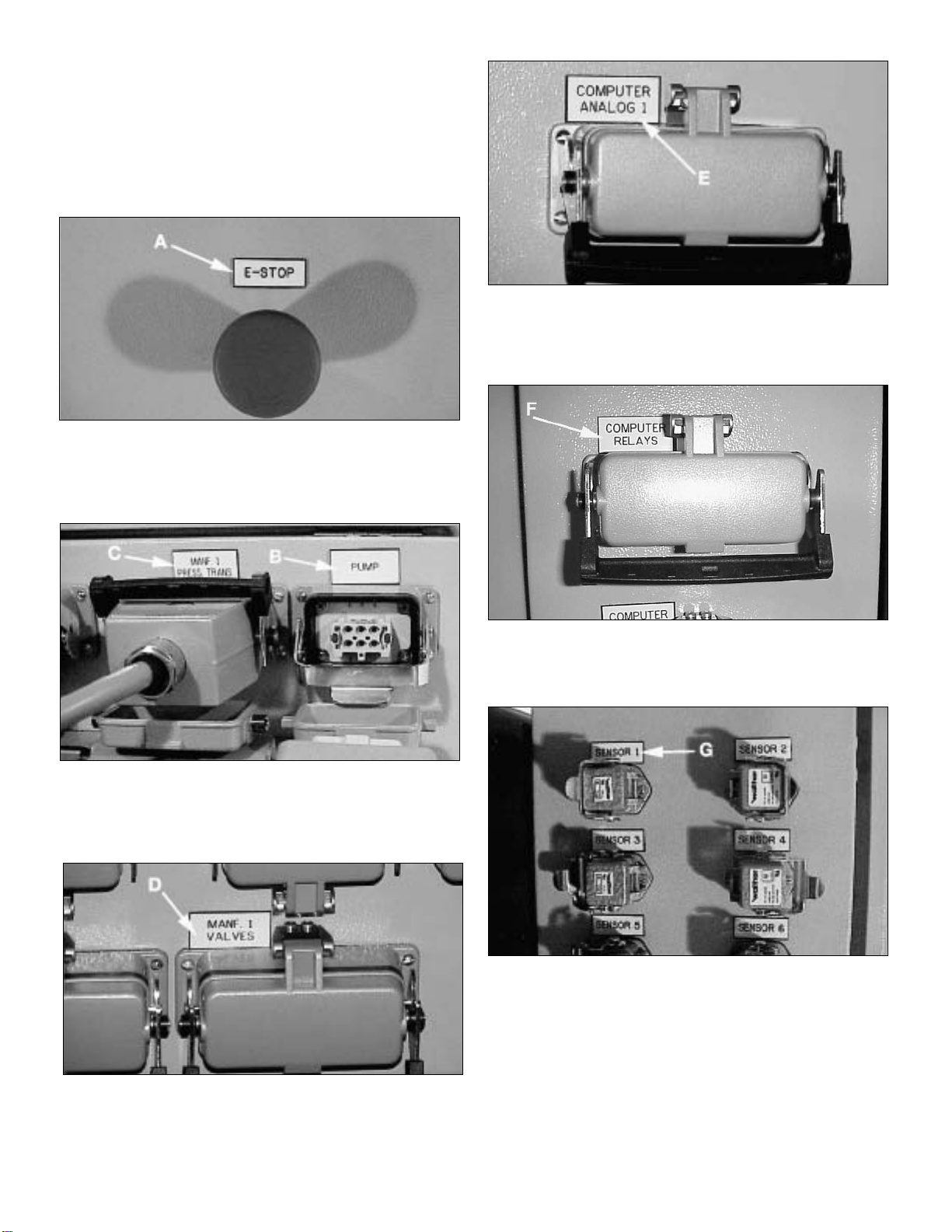
9.5 Cylinder/Sensor Interface Check
1. Sensors from each lift point should be placed near the cylinder
to ensure precise measurement of load displacement.
2. Manually extend the sensor cable to verify that the sensor
readout change corresponds to the lift point being tested. If
the cylinder and sensor operation do not correspond, the
situation must be corrected prior to operating the system.
CAUTION: Inaccurate load displacement data may be
the result of SENSORS that are not placed on solid
foundations. The display may indicate that the
sensors are seeing load movement, however, the load may
not have moved. What may occur is that the cylinder base had
settled or compressed and the sensor positions have changed
as a result.
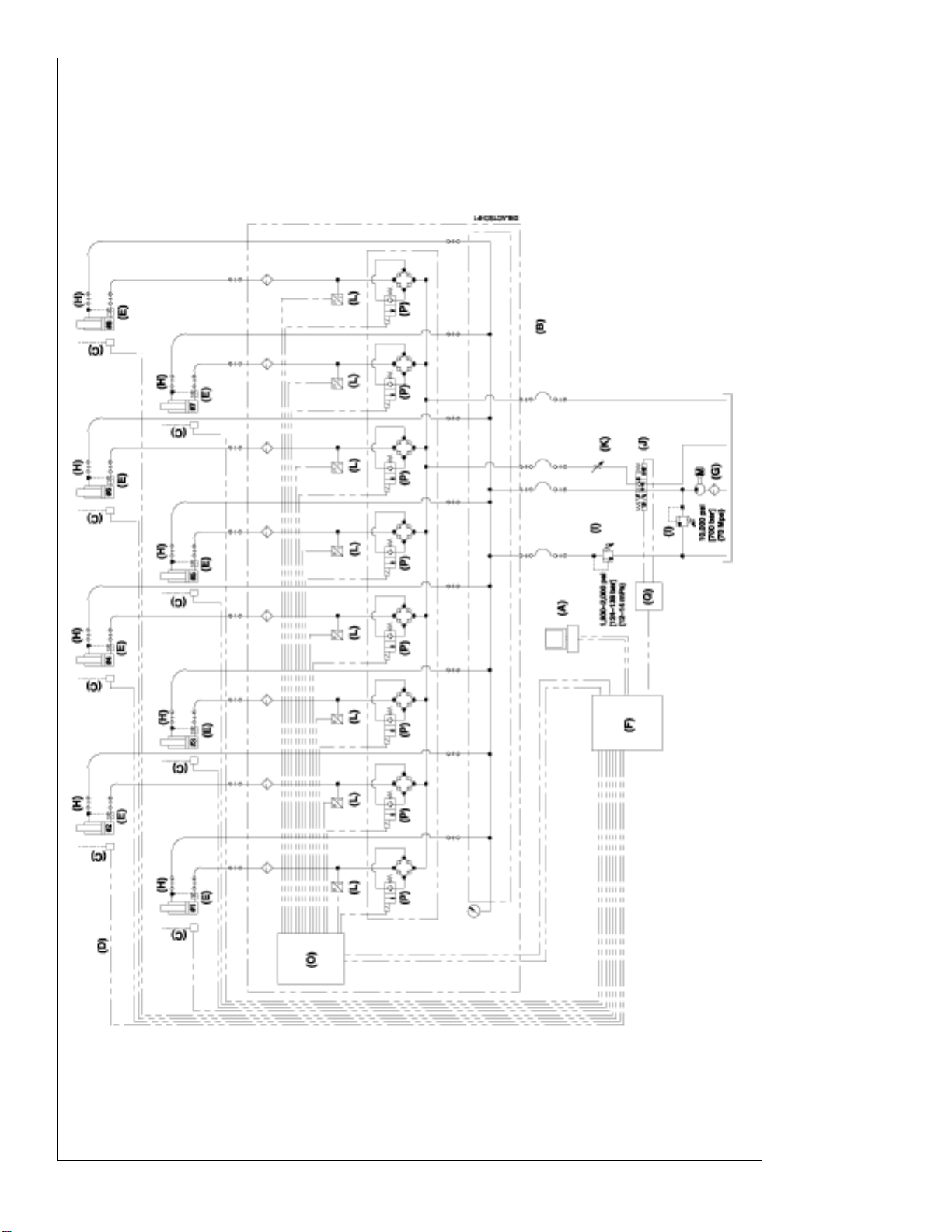
9.6 Flow Control Valve Setting
A V-8F FLOW CONTROL VALVE is located on the advance side of
the CYLINDER CONTROL VALVE. This valve is to be used to
affect the rate of flow in the extend and retract directions.This valve
is used to control the flow rate to the cylinders and can be adjusted
to increase the accuracy of the system. (Refer to "Troubleshooting
Response Errors".) For best accuracy in the lifting mode, the flow
rate must be restricted to 91 in 3/min [1,5 liter/min]) or less. The
higher the flow rate, during lifting, the lower the accuracy in
positioning.
NOTE: In the MANUAL mode, individually extend each cylinder
until the load is contacted. If the system is equipped with pressure
transducer, the pressure of each cylinder can be read on the
pressure display.When readout begins changing, the cylinder is in
contact with the load. Be sure only one cylinder is extended at a
time. Visually inspect each lift point to ensure that each cylinder
has made load contact.
10.0 LIFTING SEQUENCE
10.1 Manual Mode
To commence the cylinder movement the measuring has to be
started first by clicking the command button START.After that either
single circuits or all circuits which are switched on can be extended
or retracted. When all cylinders are driven together in the manual
mode synchronized movement is not controlled. Movement can be
stopped either by clicking the command button STOP or by hitting
any key on the keyboard (except the return or space bar key).
The info-label in the upper part of the program window shows
which function is currently used.
The display STROKE VALUE shows the movement of each lifting
point. The display DIVERGENCE shows the difference between
maximum and minimum stroke value of all circuits which are
switched on.
The system is also equipped with pressure transducers. The
pressure of each circuit can be read on the pressure display.When
readout begins changing the load is contacted. Be sure only one
cylinder is extended at a time. Visually inspect each lift point to
ensure that each cylinder has made load contact.
By clicking the command button RESET, stroke values are set to
zero. The display of the absolute sensor extension will not be
changed.
10.2 Automatic Mode - Stroke Sensing (Standard)
By choosing the AUTOMATIC option in the MODE area, automatic
mode is activated. The automatic mode allows controlled
synchronized lifting and lowering within a preset tolerance of all
lifting points which are switched on. This mode also allows for
presetting a stroke limit when lifting or lowering is stopped.
Before lifting or lowering is started all stroke values should be set
to zero by clicking the command button RESET.
The desired tolerance can be entered in the textbox TOLERANCE
after activating it by clicking on it. The minimum tolerance which
can be achieved depends on the cylinder speed which results from
the cylinder size and the output volume of the pump unit.