Contents
1. Before you start .......................................................................................................................................................... 4
1.1. recaution and Safety ...........................................................................................................................................................................4
1.2. Updates..................................................................................................................................................................................................4
1.3. Important Notes......................................................................................................................................................................................4
. Abbreviations............................................................................................................................................................... 5
3. Quick guide ................................................................................................................................................................. 6
3.1. Connecting the camera module ............................................................................................................................................................6
3.2. Camera settings ....................................................................................................................................................................................6
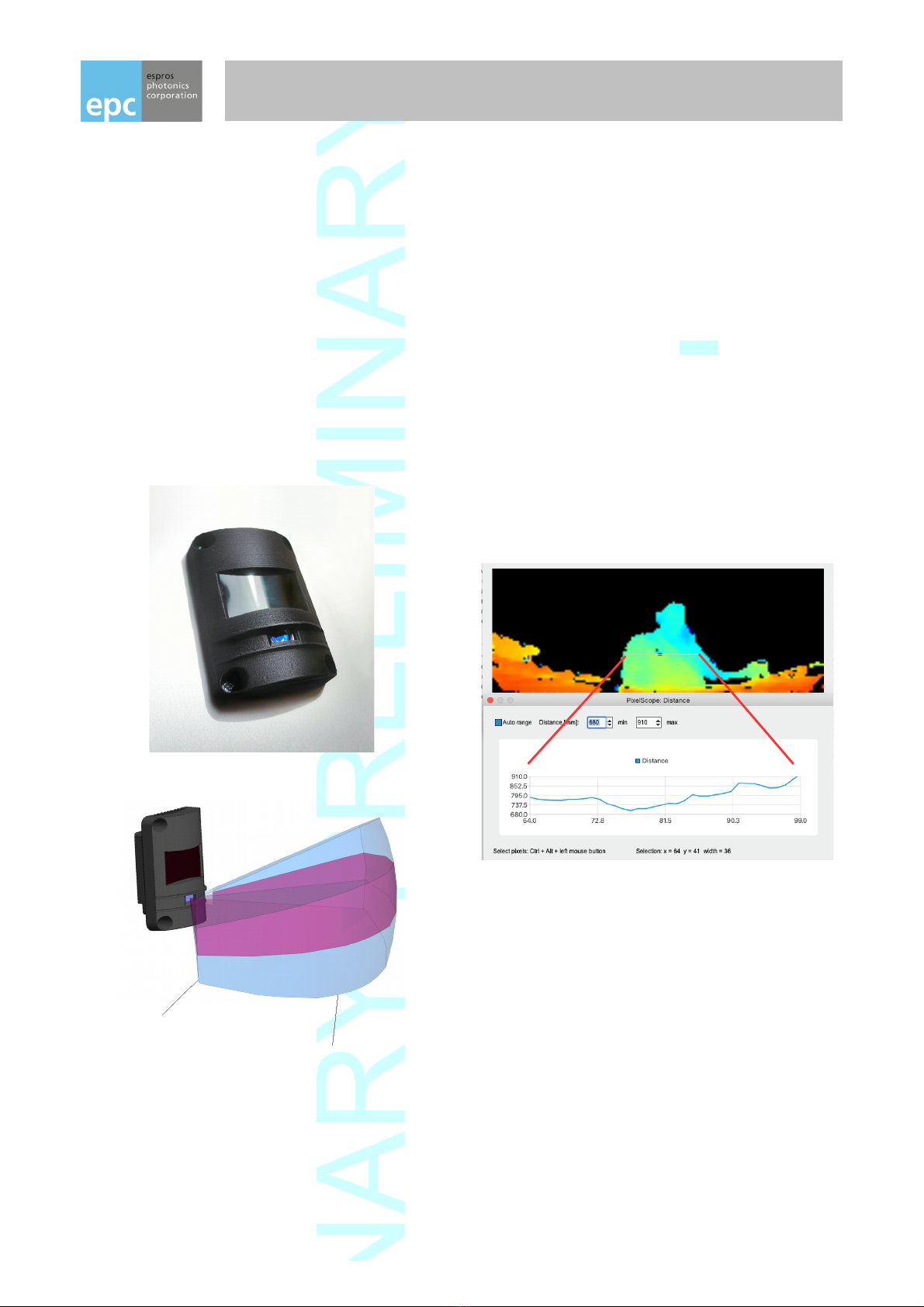
4. TOFcam-635-S time of flight camera module ..........................................................................................................7
4.1. System overview and use cases ...........................................................................................................................................................7
4.2. Scope of delivery ...................................................................................................................................................................................8
4.3. Ordering information ..............................................................................................................................................................................8
4.4. Technical data .....................................................................................................................................................................................10
4.5. Mechanical data ..................................................................................................................................................................................11
4.5.1. Mechanical features ............................................................................................................................................................................11
4.5.2. Mechanical dimensions .......................................................................................................................................................................11
4.5.3. Mounting plane ....................................................................................................................................................................................12
5. GUI ............................................................................................................................................................................. 13
5.1. ut the camera into operation .............................................................................................................................................................13
5.1.1. USB interface ......................................................................................................................................................................................13
5.1.2. UART interface ....................................................................................................................................................................................13
5.2. GUI main window ................................................................................................................................................................................13
5.2.1. View Menu ...........................................................................................................................................................................................14
5.2.2. lay menu ............................................................................................................................................................................................16
5.2.3. Live image window...............................................................................................................................................................................16
5.2.4. Decided information windows .............................................................................................................................................................18
5.2.5. Input readout and Output Control menu .............................................................................................................................................20
5.2.6. Configurations and firmware upgrade menu........................................................................................................................................20
6. Operating the device with a ROS ............................................................................................................................ 1
6.1. ROS camera driver...............................................................................................................................................................................21
6.1.1. What is ROS?.......................................................................................................................................................................................21
6.1.2. Installation............................................................................................................................................................................................21
6.1.3. Running the ROS driver.......................................................................................................................................................................21
6.2. ROS A I...............................................................................................................................................................................................22
6.2.1. Start of the node...................................................................................................................................................................................22
6.2.2. ublished topics...................................................................................................................................................................................22
6.2.3. Dynamically reconfigurable parameters...............................................................................................................................................23
7. Operating the camera with the Python Framework................................................................................................ 4
7.1. Script example .....................................................................................................................................................................................24
7.2. Comport................................................................................................................................................................................................24
7.3. Resulting data frame ...........................................................................................................................................................................24
7.4. Toolchain:.............................................................................................................................................................................................24
8. Operating the device by UART interface ................................................................................................................ 5
8.1. Sensor interface ..................................................................................................................................................................................25
8.1.1. Connector ............................................................................................................................................................................................25
8.1.2. in table for TOFcam-635-S-UWF-850-E ...........................................................................................................................................25
8.1.3. in table for TOFcam-635-S-UWF-850-R ...........................................................................................................................................26
8.2. Communication interface......................................................................................................................................................................26
8.2.1. Hardware interface...............................................................................................................................................................................26
8.2.2. Software interface................................................................................................................................................................................26
8.2.3. Command format..................................................................................................................................................................................27
8.2.4. Response format..................................................................................................................................................................................27
8.2.5. CRC checksum.....................................................................................................................................................................................28
8.2.6. Acknowledge ACK (response).............................................................................................................................................................28
8.2.7. Error handling.......................................................................................................................................................................................28
8.3. Command set overview........................................................................................................................................................................29
8.3.1. SET commands....................................................................................................................................................................................29
8.3.2. GET commands...................................................................................................................................................................................30
8.3.3. Miscellaneous commands....................................................................................................................................................................31
8.3.4. Factory maintenance commands.........................................................................................................................................................32
8.4. SET commands ...................................................................................................................................................................................33
8.4.1. SET_MOD_CHANNEL [0x0E] ..........................................................................................................................................................33
8.4.2. SET_INT_TIME_DIST [0x00] ............................................................................................................................................................34
8.4.3. SET_INT_TIME_GS [0x01] ...............................................................................................................................................................34
8.4.4. SET_HDR [0x0D] ..............................................................................................................................................................................35
© 2020 ES ROS hotonics Corporation
Characteristics subject to change without notice
2 / 51 Installation_and_Operation_Manual_TOFcam635-S_V0.10
www.espros.com