◎Do not expose the product to radiant heat
generated from a heat source, and use the
product within the ambient temperature range of
5℃to 45℃.
◎Use the product in humidity range of 35% to 85%
(without dew condensation).
◎Please use the product below altitude of 1000
meters.
◎Please use when environmental illumination is
greater than 500 lux.
◎Do not use the product in an atmosphere of
corrosive gases (sulfuric acid or hydrochloric
acid). Rust may form and reduce the structural
strength of the product.
◎Do not use the product in a place exposed to
dust, or iron powder. If dust enters the product
through small openings and gaps, the product
may suffer damage.
◎Please do not use the product near severe
vibration.
◎Please do not use the product near strong
electromagnetic waves, locations that may
generate high current, welding operations which
may generate electric arc, locations that may
generate interference due to static electricity to
avoid the abnormal operation of product.
◎Please mount the product and jaws with
adequate screw tightening torque.
◎Please do not approach or touch the product
while the product is operating.
◎When a person is accidentally caught into
the machine, please turn off the power supply
immediately or push the emergency stop button
of external safety loop device, and then adjust the
jaws position or remove the jaws manually for
disengagement.
◎Do not touch the connectors or exposed
terminals of the controller. Doing so may result
in electric shock.
◎Turn off the power to the product in the event
of power failure. Failure to do so may cause the
product to suddenly start moving when the power
is restored, resulting in injury or product damage.
◎If the product is generating heat, smoke, a
strange smell or continual noise, turn off power
immediately. Continuing to use the product may
result in product damage or fire.
◎When the product gripping workpiece loses
the position coordinate, or the original point
return (RESET) cannot be performed due to the
product gripping workpiece after starting the
product, please move the product to the safe
area first, and then set the parameters of the
software interface (XEG-W1). In the JOG mode,
or in the reverse direction GRIP operation, after
confirming that the workpiece is released, then
performed the origin return.
◎If the product does not activate while gripping a
workpiece, please cut off the power immediately.
Remove the workpiece by adjusting the jaws
position or removing the jaws manually. After the
abnormal state is corrected restart the power.
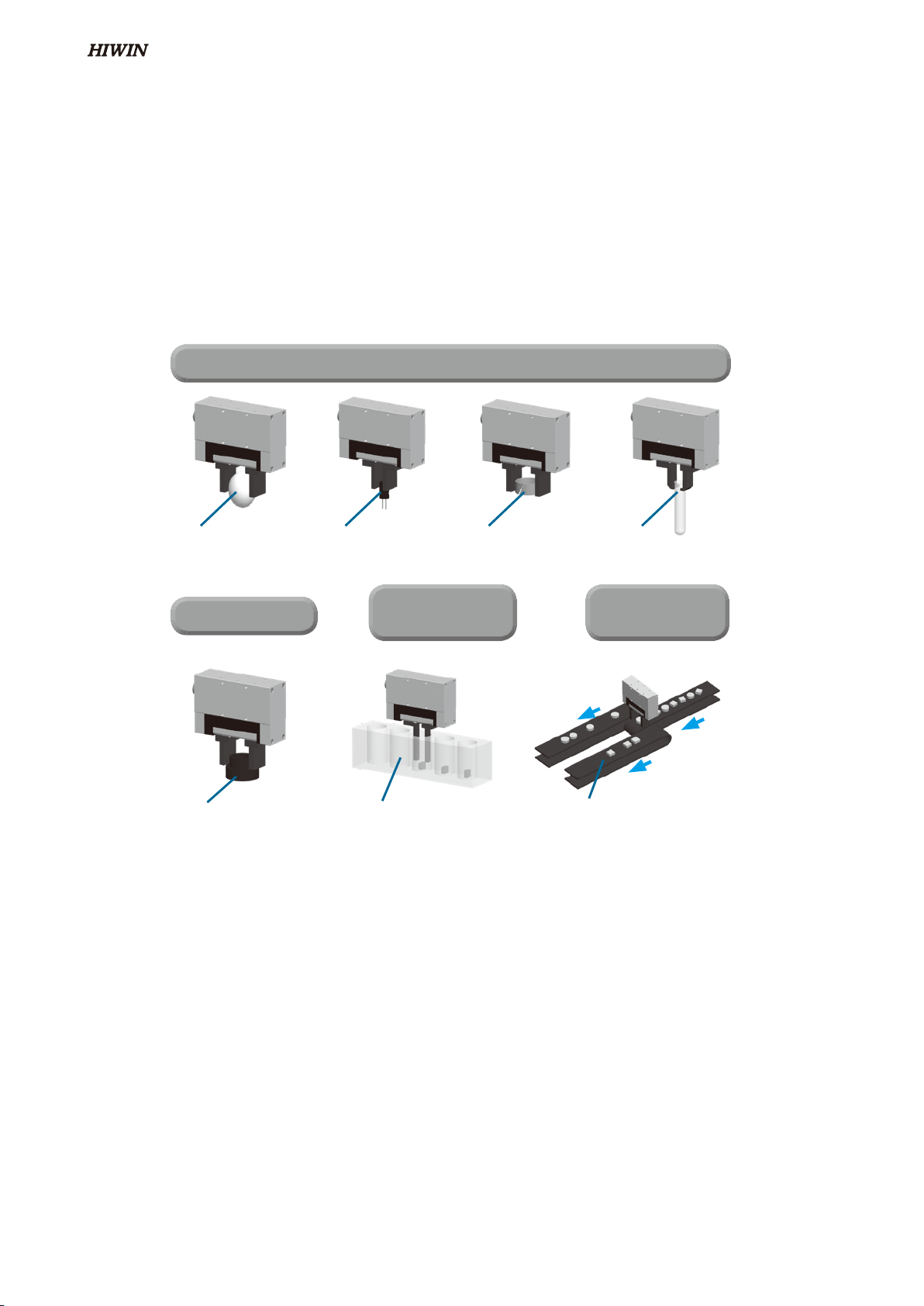
◎Please do not grip live or hazardous objects.
◎Prevent load from applying force to one jaw
when gripping a workpiece.
◎When the product is activated, please do not
apply any external force on the gripper.
◎After the product output the HOLD signal, if the
GRIP command is executed, it is necessary to
confirm that the gripping stroke and whether
the motor are out of step, causing the workpiece
to fall.
Warning
equipment to ensure safety. When operating or
adjusting the gripper, be sure to observe safety
measures for the system.
◎Please do not disassemble, or modify the product
to avoid personal accident, electric shock, fire or
damage.
C02UE03-2007
2