- 40 … + 80 °C / - 40 … +176 °F
Tensility International Corp Straight 4 position female to wire, 1.83 m (DigiKey:
839-1553-ND)
Tensility International Corp Right-angled 4 position female to wire, 1.83 m (DigiKey:
839-10-03635-ND)
115200 baud, 8 data bits, 1 stop bit, no parity, no handshaking
Quickstart guide
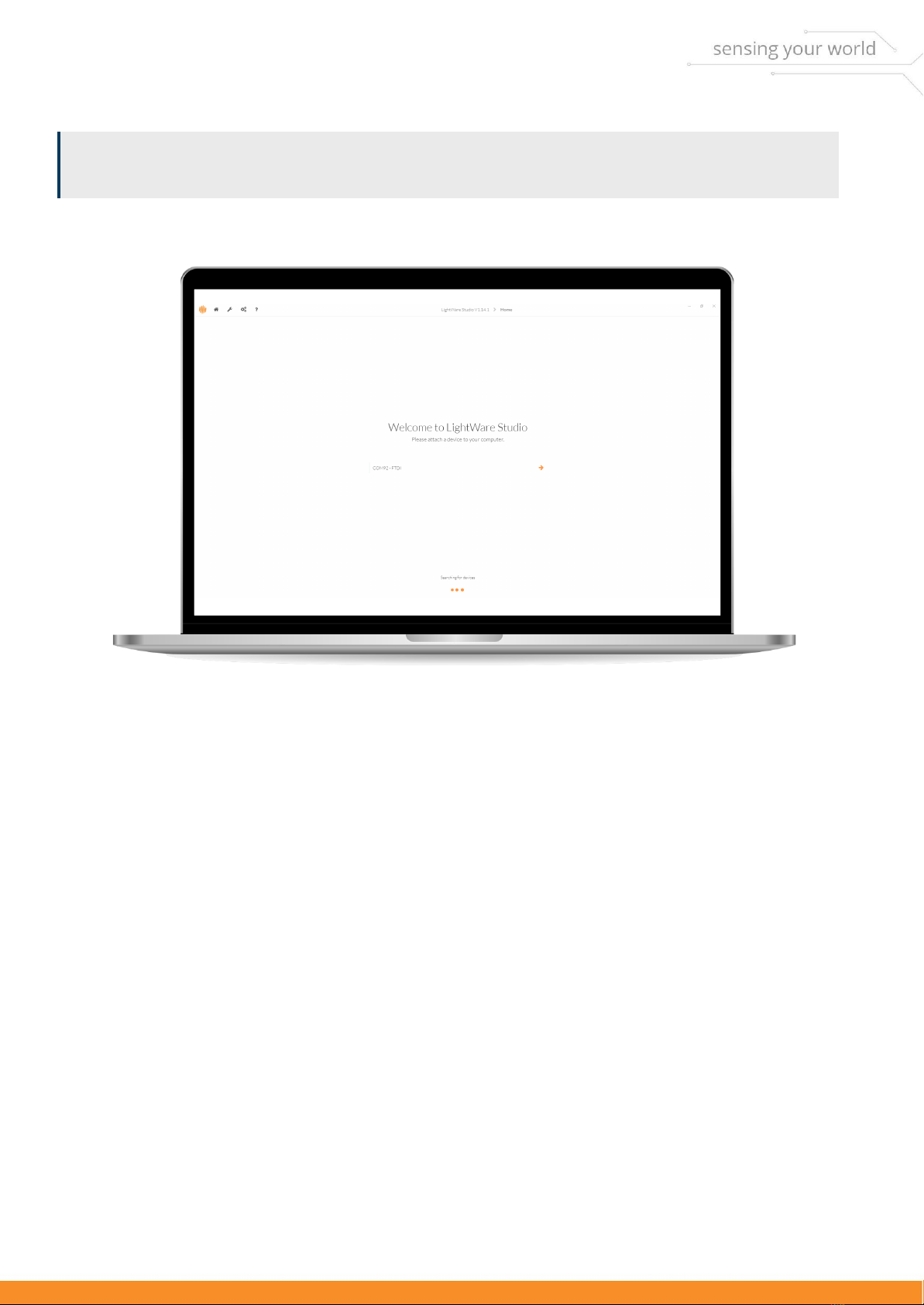
LightWare Studio is an application (available for Windows, macOS, and Linux) that can configure, update, and visualize
data for the LW24/C.
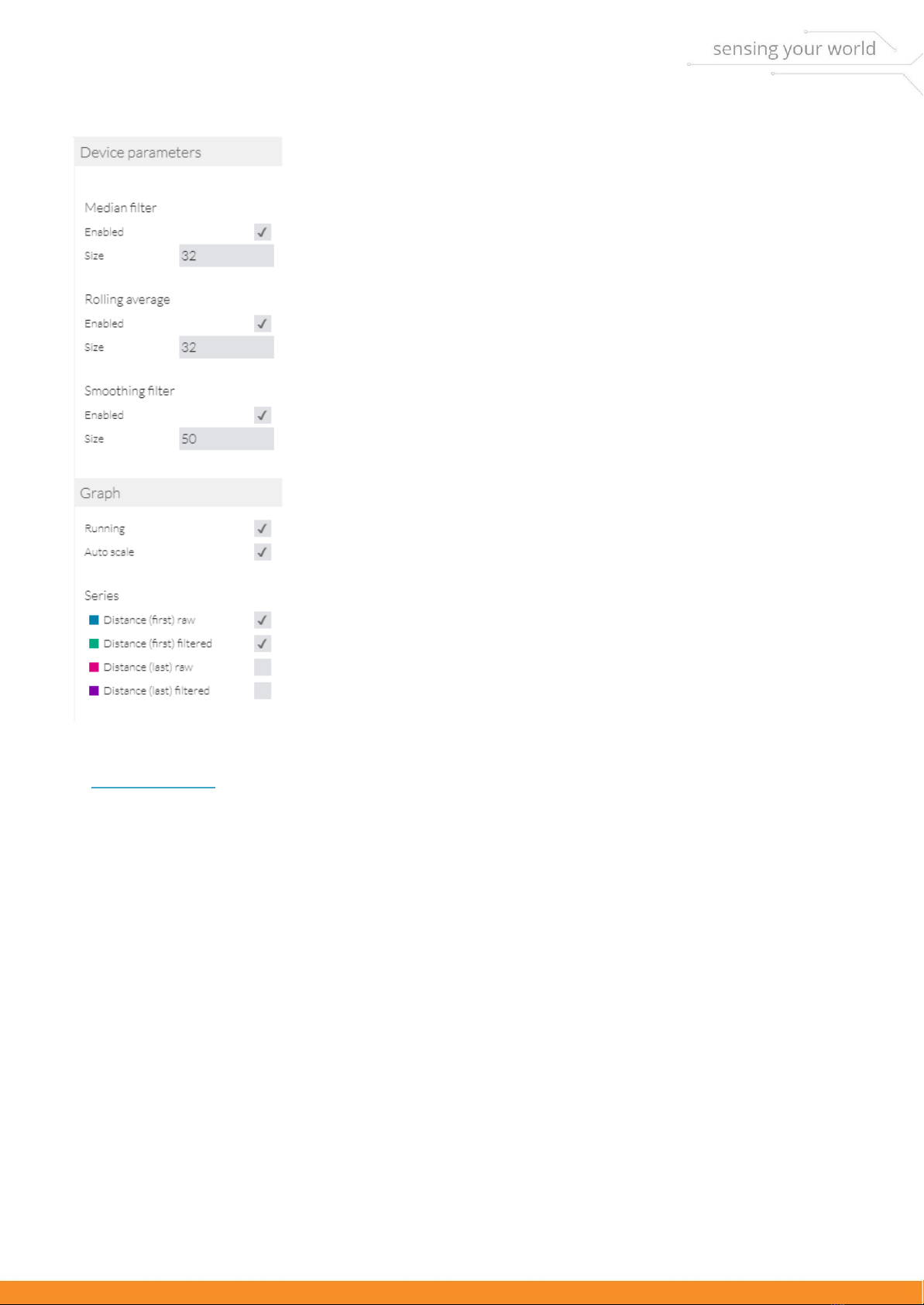
In this guide we will use LightWare Studio to view distance data from the LW24/C.
LightWare Studio can be found here. Download the version compatible with your operating system and proceed with
installation. You can safely install over an existing version of LightWare Studio if you are upgrading.
Insert the communication cable into the LW24/C and a serial to USB adaptor.
You will need a serial to USB adaptor to connect the LW24/C to a computer. Any serial TTL 3.3 V USB adaptor will work,
this guide uses one available from LightWare LLChere.
LW24/C being connected to a cable
LW24/C/SI microLiDAR™ sensor - Product guide |Version 0 |03 March 2022 Page 6of 36