Livox LIVOX LIDAR AVIA User manual

v1.0 2020.10
User Manual
LIVOX AVIA
2
©2020 Livox Tech. All Rights Reserved.
Using this Manual
Legend
Warning Important Hints and Tips Explanation
Downloading Documents
Visit the link below to download the latest Livox Avia User Manual and other documents related to the Livox Avia
www.livoxtech.com/avia
Downloading Livox Viewer
Visit the link below to download Livox Viewer.
www.livoxtech.com/avia
Downloading Livox SDK
Visit the link below to download the Livox SDK:
https://github.com/Livox-SDK
Searching for Keywords
Search for keywords such as “FOV” and “mount” to nd a topic. If you are using Adobe Acrobat Reader to
read this document, press Ctrl+F on Windows or Command+F on Mac to begin a search.
Navigating to a Topic
View a complete list of topics in the table of contents. Click on a topic to navigate to that section.
Printing this Document
This document supports high resolution printing.

©2020 Livox Tech. All Rights Reserved.
3
Contents
Using this Manual 2
Legend 2
Downloading Documents 2
Downloading Livox Viewer 2
Downloading Livox SDK 2
Product Prole 4
Introduction 4
Product Characteristics 4
Overview
7
Connectors 8
M12 Aviation Connector 8
Power Cable and Sync Cable 9
Ethernet Port 10
Mounting the Livox Avia 10
Eective Field of View (FOV) Range 10
Mounting Notice 11
Dimensions
11
Getting Started 13
External Power Supply 13
Connection
13
Usage 16
Coordinates
16
Output Data 16
Working States & Working Modes 18
Multiple Return Mode 19
IMU
19
Livox Viewer 19
Software Development Kit (SDK) 20
Storage, Transportation, and Maintenance 20
Storage 20
Transportation 20
Maintenance 20
Troubleshooting 21
After-Sales Information 21
Appendix 22
Appendix 1 22
Appendix 2 22
Specications 23

4
©2020 Livox Tech. All Rights Reserved.
Product Prole
Introduction
The Livox Avia is a highly reliable and lightweight LiDAR sensor that features a long detection distance, high
precision, and wide field-of-view (FOV). It can be used for a wide range of applications such as robotics,
mapping, and vehicle-to-everything (V2X).
High Detection Range: The Avia has signicantly optimized the detection range of low reectivity objects (e.g.,
rebar, concrete, rock, or soil) by 70%.
Light Weight: The compact and portable Avia weighs just 498 g, making it suitable for drone mapping and
small robots.
Triple Return: Firmware supports up to triple return in mapping so as to better meet the needs of forestry
mapping.
Alternative Scanning Patterns: The Avia supports both non-repetitive and repetitive scanning patterns. Non-
repetitive scanning technology is used to improve the static scanning eect and the eect for the vertical plane
during on-the-y mapping. Repetitive scanning technology is used for better density uniformity of point cloud data.
Built-in IMU Module: The model of the built-in inertial measurement unit (IMU) is BMI088 and the push
frequency is 200 Hz.
User-Friendly Livox Viewer: Livox Viewer is a computer software designed for Livox LiDAR sensors and Livox
Hub. Users can check real-time point cloud data of all the Livox LiDAR sensors connected to a computer and
also record the point cloud data to view oine or for future application. The simple interface makes it easy to use.
Open-Source Livox SDK: A software development kit (SDK) is provided to help develop customizable applications
using the data acquired from the point cloud data. Livox SDK supports Windows, Linux, Mac OS, and ROS.
The Avia has a detection range of up to 320 m, which can be reached when the target object
reflects 80% or more of light. For reference, grey concrete walls and roads have a reflectivity
range from 15% to 30%, while white plaster walls have a reectivity range from 90% to 99% in an
environment with a temperature of 25° C (77° F) and a solar illuminance of 100 klx.
Before using for the rst time, remove the screen protector from the optical window.
Product Characteristics
The Avia utilizes Livox’s unique scanning technology and provides two scanning point cloud patterns: non-
repetitive scanning patterns and repetitive scanning patterns. Users can choose the scanning pattern according
to their requirements. When using non-repetitive scanning, the scanning density is denser in the center of the
FOV compared to the surrounding area. For non-repetitive scanning point cloud patterns, the Avia has a FOV
of 77.2° vertically and 70.4° horizontally. In the center of the FOV within a radius of 10°, the point cloud density
rivals traditional 32-line LiDAR sensors within 0.1 s and traditional 64-line LiDAR sensors within 0.2 s. The point
cloud density in the rest of the FOV rivals traditional 32-line LiDAR sensors within 0.2 s. Over time, the point
cloud density and coverage inside the FOV increase signicantly and reveal more detailed information of the
surroundings.
Figure 1.2.1 Point cloud patterns of the Avia accumulated over an extended period
-40-30 -20-10 010203
04
0
Azimuth/ deg
50
60
70
80
90
100
110
120
130
Zenith/ deg
-40-30 -20-10 010203
04
0
Azimuth/ deg
50
60
70
80
90
100
110
120
130
Zenith/ deg
-40-30 -20-10 010203
04
0
Azimuth/ deg
50
60
70
80
90
100
110
120
130
Zenith/ deg
-40-30 -20-10 010203
04
0
Azimuth/ deg
50
60
70
80
90
100
110
120
130
Zenith/ deg
Figure 1.2.1 displays the typical point cloud patterns of the Livox Avia over an extended period.
Livox Avia User Manual
©2020 Livox Tech. All Rights Reserved.
5
Figure 1.2.2 displays the FOV coverage of the Avia compared with other non-Livox LiDAR sensors that use
traditional mechanical scanning methods. The diagram shows that when the integration time is less than 0.3 s,
the FOV coverage of the Avia is slightly better than a 64-line LiDAR sensor. As the integration time increases,
however, the FOV coverage of the Avia increases signicantly. After 0.8 s, the FOV coverage approaches 100%,
so almost all areas are illuminated by laser beams.
For the repetitive scanning pattern, the repeat cycle is about 0.1 s, and the horizontal FOV is consistent with
that of the non-repetitive scanning pattern, which is 70.4°. The minimum vertical FOV is 4.5°, the maximum is
6.8°, and the vertical angular resolution is slightly better than traditional 32-line LiDAR sensors.
-40-30 -20-10 010203
04
0
Azimuth/ deg
50
60
70
80
90
100
110
120
130
Zenith/ deg
Figure 1.2.2 The FOV coverage of the Avia compared with non-Livox LiDAR sensors using traditional mechanical
scanning methods. The 16-line non-Livox LiDAR sensor has a vertical FOV of 30°, the 32-line non-Livox LiDAR sensor
is 41°, and the 64-line non-Livox LiDAR sensor is 27°.
FOV Coverage (%)
0.10.2 0.30.4 0.50.6 0.70.8 0.
91
10
20
30
40
50
60
70
80
90
100
Livox Avia
Integration time (s)
64 Lines
32 Lines
16 Lines
Figure 1.2.3 Repetitive scanning point cloud patterns of the Avia

Livox Avia User Manual
6
©2020 Livox Tech. All Rights Reserved.
The performance of the scanning method is dened by the FOV coverage, which is calculated as the
fraction of FOV illuminated by laser beams. The FOV coverage (C) can be calculated with the following
formula:
C =
Total area illuminated by laser beams
Total area in FOV
×100%
Refer to the ocial Livox website for more information about how the FOV coverage is calculated.
Table 1.2.1 Point cloud specications
Laser Wavelength 905 nm
Laser Safety Class 1 (IEC 60825-1:2014) (Safe for eyes)
Detection Range (@ 100 klx) 190 m @ 10% reectivity
230 m @ 20% reectivity
320 m @ 80% reectivity
Detection Range (@ 0 klx) 190 m @ 10% reectivity
260 m @ 20% reectivity
450 m @ 80% reectivity
FOV Non-repetitive scanning pattern: 70.4° (horizontal) × 77.2°
(vertical)
Repetitive scanning pattern: 70.4° (horizontal) × 4.5° (vertical)
1σ (@ 20 m)< 2 cm
Distance Random Error 1σ (@ 20 m) < 2 cm
Angular Random Error 1σ < 0.05 º
Beam Divergence 0.28° (Vertical) × 0.03° (Horizontal)
Point Rate 240,000 points/s (rst or strongest return)
480,000 points/s (dual return)
720,000 points/s (triple return)
Laser Wavelength < 0.0003%
Close Proximity Blind Zone: Livox Avia cannot precisely detect objects which are less than 1 m away.
The point cloud data may be distorted to a varying extent when the target object is within a range of
1 to 2 meters.
Tested in an environment at a temperature of 25° C (77° F) with a target object that has a reectivity
of 80% and is 0.2 meters away from the Avia. The actual environment may dier from the testing
environment. The gure listed is for reference only.

Livox Avia User Manual
©2020 Livox Tech. All Rights Reserved.
7
Overview
Livox Avia
1. Optical Window
The laser passes through the optical window and
scans objects in the FOV.
2. Conversion Cable
To connect the Avia to the Livox Converter 2.0,
users can use this cable or a cable of their own.
Refer to the Cables section for more information.
121110987
4321 5 6
1
2
43
1
2 3 4
1. LiDAR Connector Port
A JAE MX34012NF1 type connector port is used
to connect to the Avia. The mating connector is
JAE MX34012SF1 LiDAR.
2. Power Port
Connects to an external power supply. When the
Avia is connected to the Livox Convertor 2.0,
users can use a power supply of 9 to 30 V. The
connector type is MOLEX 1053313-1102. The
mating connector is MOLEX 105307-1202.
3. Mounting Hole
Make sure to use the correct screws when
mounting.
4. Locating Hole
The locating hole makes it easy for users to nd
the correct location to mount a fixed support
for the Avia. Refer to the Dimensions section for
more information.
Livox Converter 2.0
3. Ethernet Port
An RJ45 type Ethernet connector used to
connect to Ethernet cables.
4. Sync Port
The 3-pin sync port supports 3.3V LVTTL sync
signal input. Refer to Table 2.2.2 for more
information. If needed, the mating connector of
the sync port connector is Famfull 9.510A0-003-
1R0. JST GHR-03V-S is also compatible.

8
©2020 Livox Tech. All Rights Reserved.
Connectors
M12 Aviation Connector
The Avia uses the high-reliability M12 aviation connector (male). It is a M12 12P A-code fully shielded male
connector that meets the IEC61076-2-101 standard. The connector type is Finecables, the port number
is MA12FAHD12STXXXB14, and the IP rating is IP67. When the M12 aviation connector is used with the
conversion cable, users can connect the Avia to the Livox Connector 2.0 for connecting power and transmitting
control signals and data. If users want to improve the waterproof and dustproof protection of their system, they
can replace the conversion cable with a cable of their own. The mating connector is a M12 12P A-code fully
shielded female connector.
7
6
5
4
3
2
1
9
8
12 11
10
Conversion Cable
The Livox Avia includes a conversion cable. To connect the Livox Avia to the Livox Converter 2.0, users can use
this cable or a cable of their own.
121110987
4321 5 6
10
6
7
8
9
12
3
4
5
11 12
LiDAR Connector M12 Aviation Connector (Female)
Below is more information on the Livox Avia M12 aviation connector and the conversion cable.
Table 2.1.1 Conversion Cable description
LiDAR
Connector Pin
M12 Aviation
Connectors Pin Signal Type Description Color
1 1 POWER+ Power DC10V-15V Blue/white
2 2 Ground Power Ground Silver bare wire
34 Ethernet-TX+ Output 100BASE-TX, TX+ Orange/white
45Ethernet-TX- Output 100BASE-TX, TX- Orange
58 Ground Power Ground Silver braided wire
612 Sync+ Input RS485_A, Pulse Per Second Grey/white
7 9 POWER+ Power DC10V-15V Blue
83Ground Power Ground Silver bare wire
9 6 Ethernet-RX+ Input 100BASE-TX, RX+ Green/white
10 7 Ethernet-RX- Input 100BASE-TX, RX- Green
11 10 Ground Power Ground Silver braided wire
12 11 Sync- Input 100BASE-TX, RX- Grey
Figure 2.1.1 Conversion cable

Livox Avia User Manual
©2020 Livox Tech. All Rights Reserved.
9
Pulse Per
Second (PPS)
t0
t1
t0=1000 ms
20 ms <t1< 200 ms
Figure 2.1.2 Sync signal description
Sync signal description
* Visit https://github.com/Livox-SDK/Livox-SDK and refer to the Software Development Kit (SDK) section for
more information about the sync signal.
Power Cable and Sync Cable
The Avia cables package includes a power cable and sync cable.
Power Cable
Connect “A” to the power port of the Livox Converter 2.0 and connect “B” to an external DC power supply. The
connector type of this power cable is MOLEX 105307-1202.
Figure 2.2.1 Power cable
2
1
A B
500±25 mm
Pin Signal Type Description Color
1 Power+ Power DC 10-15 V (max 30 V) Red
2Ground Power Ground Black
Table 2.2.1 Power cable description
Sync Cable
Connect “A” into the sync port of the Livox Converter 2.0 and connect “B” to the sync signal. The sync cable
has a 3-pin connector. The connector type is Famfull 9.510A0-003-1R0, which is compatible with JST GHR-
03V-S type connectors. Refer to the Data Synchronization section for more information.
Figure 2.2.2 Sync cable
1AB
2
3
500±25 mm

Livox Avia User Manual
10
©2020 Livox Tech. All Rights Reserved.
Pin Signal Type Description Color
1Ground Power Ground Black
2 Sync+ Input 3.3 V LVTTL, Pulse Per Second Blue
3Reserved Reserved Undened White
Ethernet Port
The Livox Converter 2.0 supports a 100BASE-TX standard RJ45 Ethernet port. The Avia uses two twisted pairs
to send and receive data.
Mounting the Livox Avia
Eective Field of View (FOV) Range
As shown below, the Avia has a FOV of 70.4° horizontally and 77.2° vertically. When mounting the sensor, make
sure that the FOV is not blocked by any objects. Go to www.livoxtech.com/avia to download the 3D models of
the Avia and its FOV.
Table 2.2.2 Sync cable description
32.40
70.40° 77.20°
VerticalHorizontal
Unit: mm
Figure 3.1.1 Eective FOV of the Avia
Figure 3.1.2 Eective FOV of the Avia
Note that the eective detection range of the Avia varies based on where the object is within the FOV. The
closer to the edge of the FOV, the shorter the eective detection range is. The closer to the center of the FOV,
the farther the eective detection range. Refer to the diagrams below:
VerticalHorizontal
Unit: m
80% reectivity
10% reectivity
solar illuminance: 100 klx
258
320
190
138
320
272
190
146
200
250
300
350
150
100
50
0
-30°
-15° 15°
30°
0°
60°
75° 105°
120°
90°
200
250
300
350
150
100
50
0

Livox Avia User Manual
©2020 Livox Tech. All Rights Reserved.
11
Mounting Notice
Read and understand the following warnings before mounting the Avia.
1. Before use, remove the screen protector from the optical window.
2. Signicant dust and stains on the optical window will aect the performance of the Avia LiDAR sensor.
Follow the instructions in the Maintenance section to clean the optical window using compressed air,
isopropyl alcohol, or a lens cloth.
3. When mounting the Avia, the eld of view must not be blocked by any object, including glass. Refer to
Figure 3.1.1.
4. There are no restrictions on which direction the Avia can be installed. The top or bottom surface can be
used to mount the Avia. It is recommended that the surface is parallel to the ground when mounting.
5. The Avia cannot bear any extra payload. Otherwise, the reliability of the product cannot be guaranteed.
Dimensions
Refer to the dimensions and the mounting holes in the diagrams below to mount or embed the Avia to or in an
appropriate place on the target base using M3 screws. Since the top and bottom sides as well as the left and
right sides of the Avia are symmetric to the optical axis, the Avia can be mounted using any of these sides.
The Avia can also be mounted or embedded to or in an appropriate place on a mounting bracket (not included).
Figure 3.3.1 Livox Avia Dimensions (refer to Appendix 1)
Unit: mm
32.40
64.80
61.20
75.55
20.00 65.00
46.00
31.90
13.50
91.00
20.00 34.00
6.00 79.00
46.00
16-M3
32.40
4
65.00
20.00
46.00
20.00 34.00 2.00
4.00
+0.05
0 1.4
4.00
+0.05
0 1.4
32.40
64.80
61.20
75.55
20.00 65.00
46.00
31.90
13.50
91.00
20.00 34.00
6.00 79.00
46.00
16-M3
32.40
4
65.00
20.00
46.00
20.00 34.00 2.00
4.00
+0.05
0 1.4
4.00
+0.05
0 1.4

Livox Avia User Manual
12
©2020 Livox Tech. All Rights Reserved.
Livox Converter 2.0
Refer to the dimensions below to mount the Livox Converter 2.0 correctly.
74.00
52.00 22.90 37.00
66.00
4-M2 2.5
单位:mm
Figure 3.3.2 Livox Converter 2.0 Dimensions (refer to Appendix 2)
Weight Approx. 88 g
Dimensions 74×52×23 mm
Table 3.3.1 Livox Converter 2.0 Weight & Dimensions

©2020 Livox Tech. All Rights Reserved.
13
Getting Started
External Power Supply
The working voltage range of the Avia is from 10 to 15 V, with a recommended working voltage of 12 V. When
an extension cable is required, make sure to increase the output voltage of the external power source due to
the extra voltage reduction. Make sure the maximum voltage does not exceed 15 V. The minimum working
voltage should be increased in a low-temperature environment. Note that the power cable may generate
voltage uctuation where the voltage exceeds 15 V in some scenarios such as if the power cable is interfered
with or other devices connected to another power source in the parallel circuit suddenly power o. In such
scenarios, the Avia may not work normally or may even be damaged.
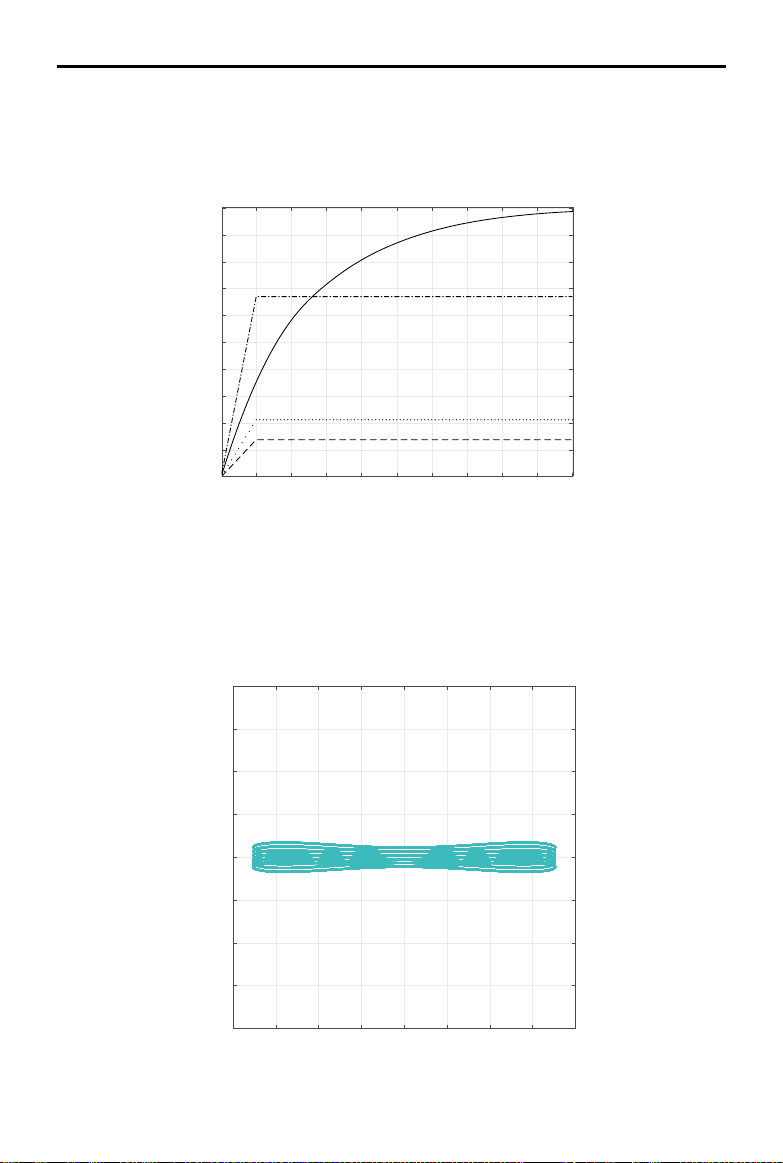
Normally, the working power of the Avia is 9 W. In an environment where the temperature is from -20° to -10° C
(–4° to 14° F), the Avia will first enter self-heating mode, which lasts at least three minutes. In self heating
mode, the working power of the Avia may reach up to 31 W. The working power of the Avia varies at dierent
temperatures. Below shows the relationship between the temperature of the environment and the working
power of the Avia. Make sure the power supply is suitable based on the peak power value of the Avia.
Figure 4.1.1 The working power of the Avia at dierent temperatures
Connection
The Avia uses an M12 aviation connector for power supply as well as control signal and data transmission.
Refer to the Cables section for more information about the connector. The Livox Converter 2.0 integrates
a LiDAR port, a sync port, a power port, and an Ethernet port. For temporary use or to ensure optimal
performance, it is recommended to use a Livox Converter 2.0 and a conversion cable.
The Avia uses an Ethernet cable for data transmission and supports user datagram protocol (UDP). Both static
and dynamic IP address configurations are supported. All Avia LiDAR sensors are set to static IP address
mode by default with an IP address of 192.168.1.1XX (XX stands for the last two digits on the serial number of
the Avia LiDAR sensor). The default subnet masks of the Avia LiDAR sensors are all 255.255.255.0, and their
default gateways are 192.168.1.1. Directly connect the Livox Avia to the computer when using for the rst time.
The static and dynamic IP addresses are connected in dierent ways. 1. The static IP address is connected
by default and in this mode the Avia can be connected to a computer directly. 2. To connect to the dynamic
IP address, make sure the Avia is switched to dynamic IP mode by using Livox Viewer or the Livox SDK. In
dynamic address mode, the addresses are assigned to the Avia using dynamic host conguration protocol
(DHCP).
Static IP address:
Follow the steps to set the IP address of your computer to static IP address:
Windows®system
a. Click to enter the Network and Sharing Center under Control Panel.
b. Click the network you are using and click “Properties”.
Temperature (℃)
Peak Power for Livox Avia When Powering On
0.0
5.0
10.0
15.0
20.0
25.0
30.0
35.0
-20 -10 15 20030 65

Livox Avia User Manual
14
©2020 Livox Tech. All Rights Reserved.
c. Double click “Internet Protocol Version 4 (TCP/IPv4)”.
d. Set the static IP address of the computer to 192.168.1.50 and the subnet mask to 255.255.255.0. Click
“OK” to complete.
Ubuntu™-16.04 system
1. The IP address of the computer can be configured by using ifconfig command at the terminal. The
conguration code is as below:
~$ sudo ifcong enp4s0 192.168.1.50 (replace “enp4s0” with the network port name of the computer)
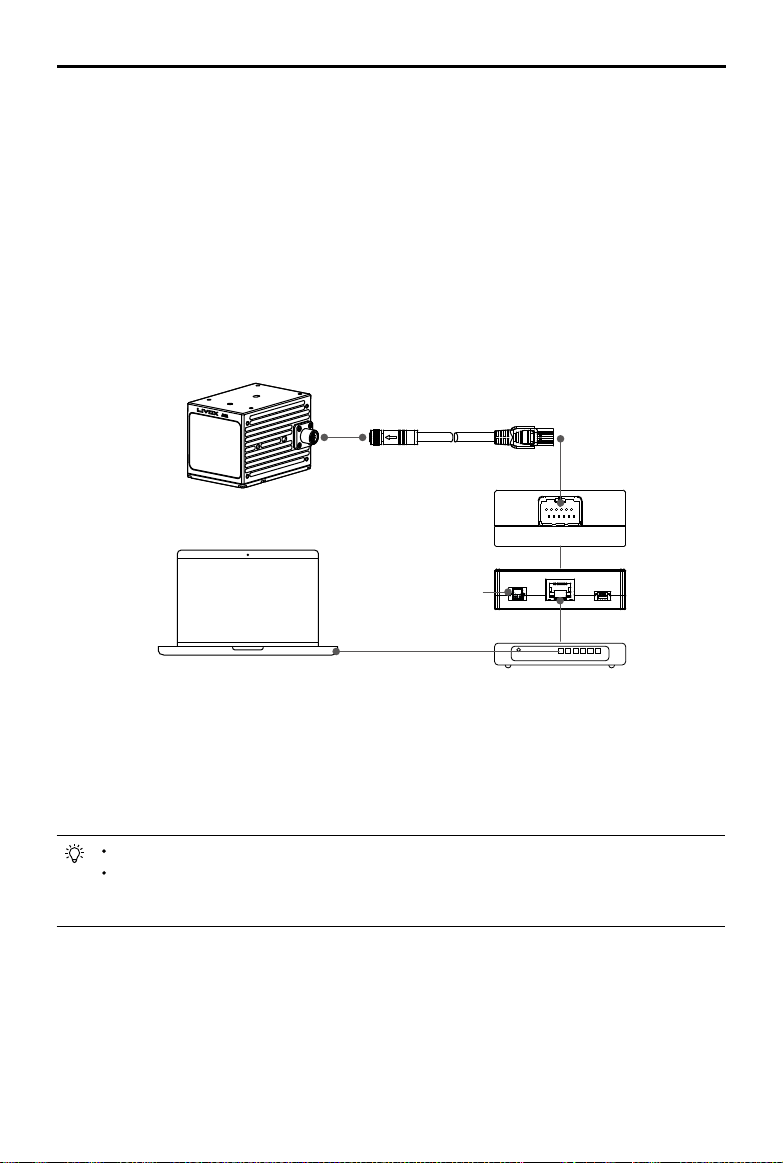
2. Connect the Avia, Livox Converter 2.0, external power source, and computer by following Figure 4.2.1.
Livox Converter 2.0
Livox Avia
External Power Source
Ethernet Cable
Conversion Cable
Figure 4.2.1 Connecting using static IP address
a. Connect the Avia to the 1.5m aviation connector and converter connector cable. Next, connect the 1.5m
cable to the Livox Converter 2.0.
b. Connect the computer and the Livox Converter 2.0 to the router using Ethernet cables. Make sure both
the Livox Converter 2.0 and the computer are connected to the LAN port on the router.
c. Connect the Livox Converter 2.0 to an external power source.
If multiple Avia LiDAR sensors are set to static IP addresses, make sure all the Avia LiDAR sensors
have dierent IP addresses and use a switchboard to connect them to the computer.
Launch Livox Viewer after the Avia is connected. Click the device with the static IP address that
should be altered. Click to open the settings page and set the static IP address of the Avia.
If more than six Avia LiDAR sensors are required, use a kilo mega switchboard. Otherwise, data may
get lost and there may be connection failures.
Dynamic IP address:
1. Follow Figure 4.2.1 to connect the Livox Avia, Livox Converter 2.0, external power source, and computer.
2. Run Livox Viewer, click to open the settings page, and set the IP address of the Avia to dynamic IP
address.
3. Disconnect the Avia, conversion cable, Livox Converter 2.0, external power source, and computer.
4. Follow the steps to set the IP address of your computer to dynamic IP address:
Livox Avia User Manual
©2020 Livox Tech. All Rights Reserved.
15
Windows system
a. Click to enter the Network and Sharing Center under Control Panel.
b. Click the network you are using and click “Properties”.
c. Double click “Internet Protocol Version 4 (TCP/IPv4)”.
d. Select “Obtain an IP address automatically” and “Obtain DNS server address automatically”, then click
“OK” to complete.
Ubuntu-16.04 system
a. Click to open “Network”.
b. Click “IPv4”, and then click “Automatic (DHCP)”. Click “Apply” to complete.
5. Connect the Avia, conversion cable, Livox Converter 2.0, router, computer, and external power supply by
following Figure 4.2.2.
Figure 4.2.2 Connecting using dynamic IP address
a. Connect the Avia to the 1.5m aviation connector and converter connector cable. Next, connect the 1.5m
cable to the Livox Converter 2.0.
b. Connect the computer and the Livox Converter 2.0 using an Ethernet cable.
c. Connect the Livox Converter 2.0 to an external power source.
If more than six Avia LiDAR sensors are required, use a kilo mega router.
The broadcast number for each LiDAR sensor can be viewed in the Device Manager of Livox
Viewer or the Livox SDK. For the Avia, the broadcast number will be its serial number ending in an
additional “1”.
Livox Avia
Router with DHCP
Ethernet Cable
External Power Supply

16
©2020 Livox Tech. All Rights Reserved.
Usage
Coordinates
The Avia has a built-in IMU. The coordinates of the point cloud O-XYZ and of the IMU O'-X'Y'Z' are dened as
below:
O
X
Z
Y
Z'
X' Y'
O'
32.40
70.40°
XX
Y
Z
77.20°
The origin O' of IMU coordinate is dened in the point cloud coordinates as (-41.65, -23.26, 28.40) (Unit: mm).
Output Data
The output information of Livox Avia LiDAR sensors includes point cloud data and IMU data. Both point cloud
data and IMU data have timestamp and status codes, while point cloud data also has the target reectivity,
coordinates, and tag information.
Point Cloud Data
A point cloud is the collection of the points where the surface of an object was detected in the FOV of the
LiDAR sensor. Each point contains the following information.
Target reflectivity: 0 to 255. 0 to 150 corresponds to the reflectivity within the range of 0 to 100% in the
Lambertian reflection model. 151 to 255 corresponds to the reflectivity of target objects with retroflection
properties.
Coordinates: can be expressed as Cartesian coordinates (x, y, z) and Spherical coordinates (r, θ, φ). The
relationship between Cartesian and Spherical coordinates is shown in the gure below. When there is no object
within the detection range or the object is placed outside the detection range, the coordinates of the point
cloud will be expressed as (0, 0, 0) in Cartesian coordinates and as (0, θ, φ) in Spherical coordinates.
Figure 5.1.1 Coordinates of the Avia
Figure 5.2.1.1 Relationship between Cartesian
coordinates and Spherical coordinates
O
X
M
Z
Y
Z'
θ
P(r,θ,φ)
φ
X' Y'
O'
x= r×sin(θ)×cos(φ)
y = r×sin(θ)×sin(φ)
z = r×cos(θ)
Unit: mm
Livox Avia User Manual
©2020 Livox Tech. All Rights Reserved.
17
Tags: indicate the return type of the laser and if the point detected is a noise. The format of the tag is as shown
below:
bit7 bit6 bit5 bit4 bit3 bit2 bit1 bit0
Reserved Return number:
00: return 0
01: return 1
10: return 2
11: return 3
Point property based on intensity:
00: Normal
01: High confidence level of noise
10: Moderate condence level of noise
11: Reserved
Point property based on spatial position:
00: Normal
01: High condence level of noise
10: Moderate condence level of noise
11: Low condence level of noise
Each tag is composed of one byte. In this byte, bit7, and bit6 are Group 1, bit5 and bit4 are Group 2, bit3 and
bit2 are Group 3 while bit1 and bit0 are Group 4.
Group 2 indicates the return sequence of the sampling point. Featuring a coaxial optical path, the Avia itself
will generate a laser return even if there is no detectable object around. This return is recorded as return 0. After
that, if there is any object within the detectable range, the rst laser that returns to the Avia is recorded as return 1,
and then return 2, and so on. If the object is too close to the Avia, such as 1.5 m away, the rst eective return
will be merged into return 0, and be recorded as return 0.
Group 3 indicates if the sampling point is noise based on the intensity of the return. Normally, the intensity of the
returns of the noise generated due to the interference of atmosphere particles such as dust, rain, fog, and snow
is quite low. Therefore, noise is divided into two categories based on the intensity of the return received. "01"
represents a low intensity return, indicating that the samples have a high possibility of being noise such as dust;
“10” represents a moderate intensity return, indicating that the samples have a moderate possibility of being noise
such as rain and fog. The lower the condence level of the sample is, the lower the possibility that it is noise.
Group 4 indicates if the sampling point is noise based on its spatial position. Normally, when the Avia LiDAR
sensors detect two objects in close proximity of each other, there will be some thread-like noise between the
two objects. Noise is divided into three categories. The lower the condence level of noise is, the lower the
possibility that it is noise.
Note: Point property based on intensity and point property based on spatial position are not yet available for
Avia. Contact Livox if you require either.
Timestamp
Both point cloud data and IMU data have timestamp information. There are three ways to synchronize data with
the Avia: IEEE 1588-2008, Pulse Per Second (PPS), and GPS (PPS+UTC).
IEEE 1588-2008: IEEE 1588-2008 is the Precision Time Protocol (PTP) enabling precise synchronization of
clocks in measurement and control systems by Ethernet. Livox LiDAR sensors, as the ordinary clock in the PTP,
only support UDP/IPV4 for PTP. Livox LiDAR sensors support the following message events: Sync, Follow_up,
Delay_req, Delay_resp.
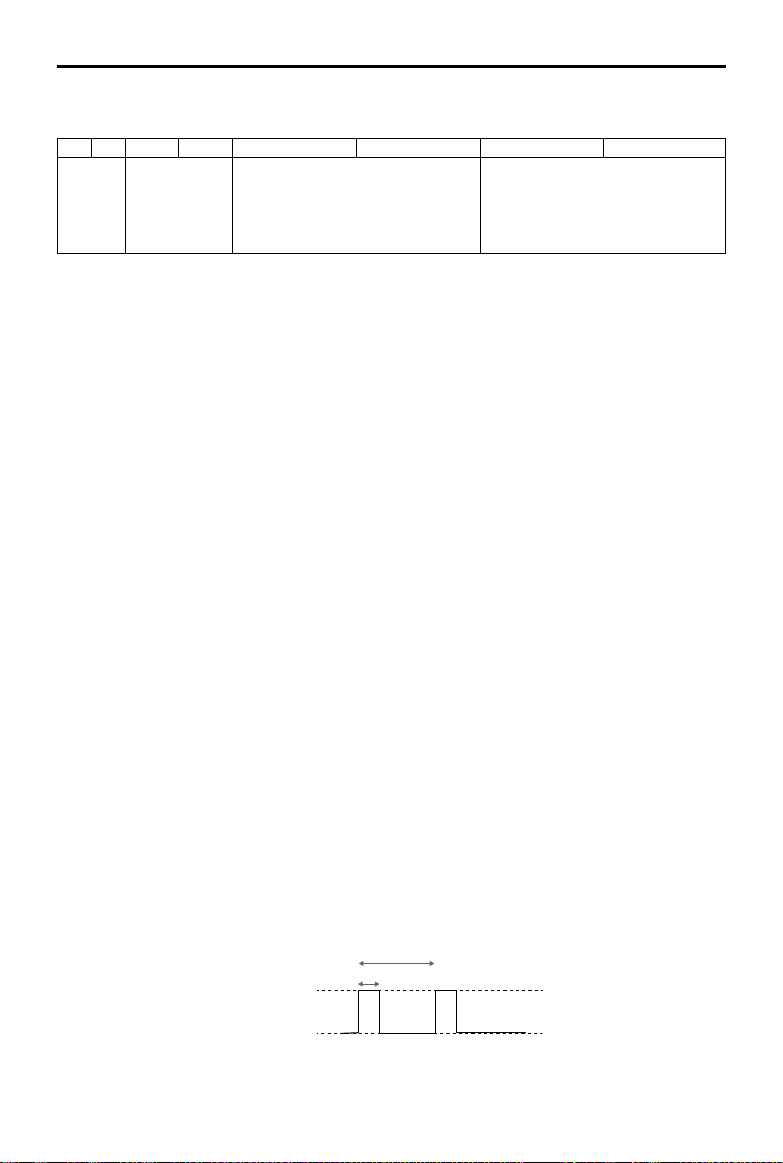
PPS: PPS uses the sync cable for data synchronization. Refer to the Cables section for more information. The
synchronization logic is shown in the gure below. The pulse interval in PPS is 1s (t0 = 1000 ms) while the
continuous time of high-level voltage is from 20 ms to 200 ms (20 ms <t1< 200ms). The rising edge of PPS
resets the timestamp to zero, so the timestamp of the point cloud data indicates the duration between the point
cloud sampling and the PPS rising edge.
Pulse Per
Second (PPS)
t0
t1
t0=1000 ms
20 ms < t1 <200 ms
Figure 5.2.2.1 Pulse Per Second

Livox Avia User Manual
18
©2020 Livox Tech. All Rights Reserved.
Figure 5.2.2.2 UTC Time Commands
GPS: GPS is a way to synchronize the data using the sync cable and UTC time. The PPS port logic is the same
as the PPS synchronization mentioned above. Users are able to send the UTC time of each pulse to the Avia
via SDK communication protocol. The logic of the UTC Time command is shown below. The timestamp of the
point cloud data stands for the UTC sampling time of the point cloud once GPS synchronization is in use. Refer
to the SDK Communication Protocols section for more information about commands.
PPS
UTC
1
0
t0
t1
t4
t0=1000 ms
20 ms <t1< 200 ms
10 ms <t4< 500 ms
Status Codes
Both point cloud data and IMU data have status code information. The status codes display the current
working status of the Avia LiDAR sensors. By checking the status codes, users can see the temperature
status, voltage status, motor status, dust warning, service life warning, and PPS signal status. Status codes
can be viewed in Livox Viewer or the Livox SDK. Refer to the Livox Viewer User Manual for more information
about how to check status codes.
Status Description
Temperature status Indicates if there is any temperature abnormality. Temperature status includes normal,
warning, and error.
Voltage status Indicates if there is any internal voltage abnormality. Voltage status includes normal,
warning, and error.
Motor status Indicates if there is any internal motor abnormality. Motor status includes normal,
warning, and error.
Dust warning Indicates if a signicant amount of dust is detected on the optical window or if the
optical window is covered by objects.
Service life warning Indicates if the LiDAR sensor is nearing the end of its service life. The LiDAR sensor
can still work for a short period once this warning appears. It is recommended to
replace the LiDAR sensor once this warning appears.
PPS signal status Indicates whether the PPS sync signal is working normally.
Working States & Working Modes
The working states of the Avia includes initializing, normal, standby, power saving, and error.
Work Status Description
Initializing The LiDAR sensor is powering on.
Working normally The LiDAR sensor is powered on and working normally.
Standby The LiDAR sensor is powered on, but the laser beams are not active.
Power saving All components are powered o apart from the communication module.
Error The LiDAR sensor will enter error status when an error is detected and all the
components are powered o apart from the communication module.

Livox Avia User Manual
©2020 Livox Tech. All Rights Reserved.
19
Figure 5.3.1 Relationship between the dierent working states
Figure 5.3.2 Relationship between the dierent working modes available in 5.3.2 Livox Viewer
The Avia also has three working modes: Normal, Standby, and Power Saving. These modes can be set in Livox
Viewer and the Livox SDK.
Multiple Return Mode
The Avia can be set to Multiple Return mode using Livox Viewer or the Livox SDK. The Avia can generate a point
cloud of up to three returns in Multiple Return mode, which has a point rate of 720,000 points per second.
To set the return mode, run Livox Viewer after the Avia is connected.
Click the desired device under Device Manager. Click to select the return mode.
IMU
Avia has a built-in IMU providing the altitude data of the Avia.
The push frequency of the IMU can be set using Livox Viewer or the Livox SDK. The method to set the IMU
push frequency is the same as setting the return mode of the LiDAR sensor.
Livox Viewer
Livox Viewer is a computer software designed for Livox LiDAR sensors and Livox Hub. Users can check real-
time point cloud data of all the Livox LiDAR sensors connected to a computer, and also record the point cloud
data to view oine or for future application. The simple interface makes it easy to use.
For more information, download the Livox Viewer User Manual from the website https://www.livoxtech.com/
downloads.
Power
saving
Standby
Normal
Power
saving
Initializing
Error
Standby
Normal

Livox Avia User Manual
20
©2020 Livox Tech. All Rights Reserved.
Software Development Kit (SDK)
Besides using Livox Viewer to check real-time point cloud data, users can also use the SDK or ROS to apply
the point cloud and IMU data acquired from Livox LiDAR sensors to dierent scenarios.
SDK Communication Protocol
With the SDK Communication Protocol, users can learn how to customize the Livox LiDAR sensors. The SDK
Communication Protocol encompasses the following three types of data:
Control Command Data: Conguration and query of LiDAR parameters and status information. Point Cloud
Data: Point cloud data generated by LiDAR.
IMU Data: IMU data generated by the built-in IMU. All data is stored in little-endian format.
Visit http://www.livoxtech.com/sdk to learn more information about the SDK Communication Protocol, Livox
SDK API Reference, and ROS Toolkit.
Storage, Transportation, and Maintenance
Storage
The storage temperature range for the Livox Avia is from -40° to 85° C (-40° to 185° F). Keep Avia LiDAR
sensors in a dry and dust-free environment.
• Make sure Avia LiDAR sensors are not exposed to environments containing poisonous or corrosive gases or
materials.
• DO NOT drop Avia LiDAR sensors and be careful when placing a LiDAR sensor in storage or taking it out of
storage.
• If a Avia LiDAR sensor is not to be used for more than three months, regularly check the sensors and
connectors for abnormalities.
Transportation
Before transportation, place Avia LiDAR sensors in a suitable box for transportation and make sure it is secure.
Make sure to place foam inside the transportation box and that the box is clean and dry.
DO NOT drop Avia LiDAR sensors and always be careful when carrying a LiDAR sensor.
Maintenance
Under normal circumstances, the only maintenance required for the Avia is to clean the optical window of
the LiDAR sensor. Dust and stains on the optical window can negatively aect the performance of the LiDAR
sensor. Make sure to regularly clean the optical window to prevent this from happening.
First, check the surface of the optical window to see if cleaning is necessary. If it is necessary to clean, follow
the steps below:
1. Use compressed or canned air:
DO NOT wipe a dusty optical window, as it will only cause more damage. Dust the optical window with
compressed or canned air before wiping the optical window. Note that if the optical window has no visible
stains afterward, it is not necessary to wipe it also.
2. Wipe the stains:
DO NOT wipe using a dry lens tissue, as it will scratch the surface of the optical window. Use the lens tissue
provided with isopropyl alcohol. Wipe slowly to remove the dirt instead of redistributing it on the surface of
the optical window.
Table of contents
Other Livox Accessories manuals

























