Fm210_01b_oi_e.docx / Nov-20 Page 3 / 40
Table of Contents
Safety Instructions and Responsibility.....................................................................5
General Safety Instructions........................................................................................................ 5
Use according to the intended purpose ..................................................................................... 5
Installation ................................................................................................................................. 6
EMC Guidelines......................................................................................................................... 7
Cleaning, Maintenance and Service Notes................................................................................ 7
Introduction ................................................................................................................8
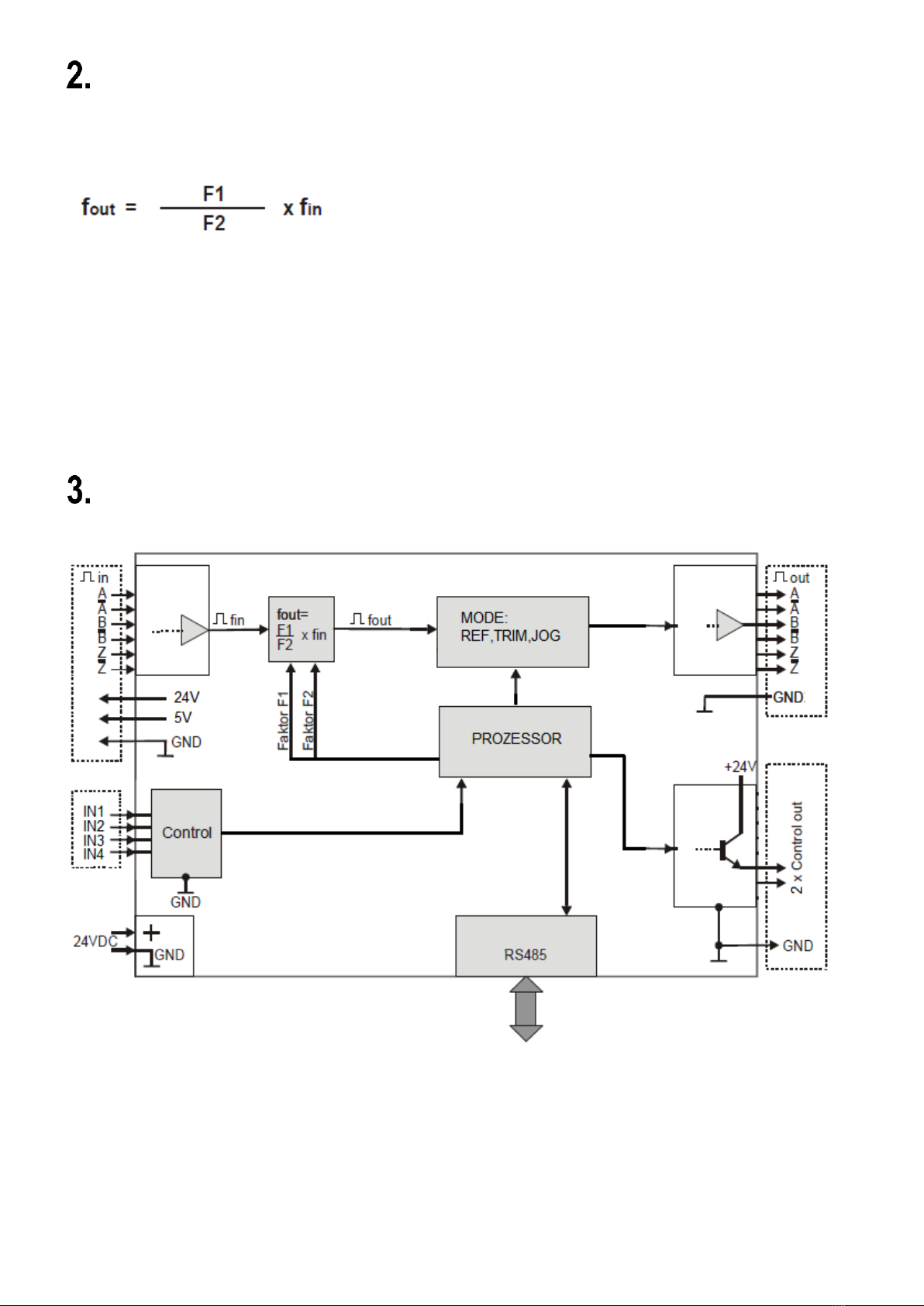
Block Diagram ............................................................................................................8
Electrical Connections...............................................................................................9
DC Input Voltage Supply ........................................................................................................... 9
Output for encoder supply 5V/24V Out ...................................................................................... 9
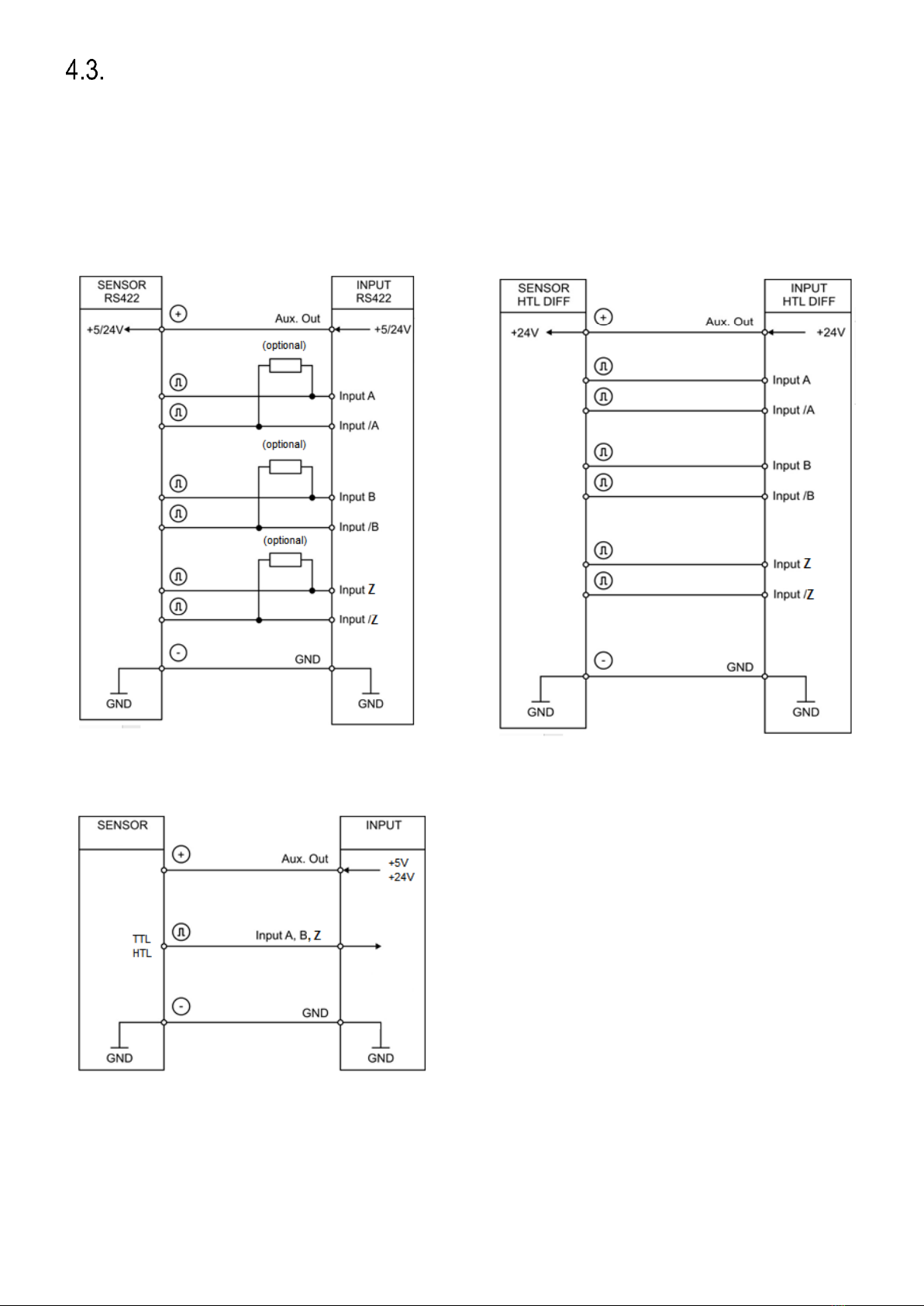
Encoder Inputs A, /A, B, /B, Z, /Z............................................................................................. 10
Control-Inputs INx.................................................................................................................... 11
Encoder Output A, /A, B, /B, Z, /Z............................................................................................ 11
Control Outputs OUTx ............................................................................................................. 11
LEDs........................................................................................................................................ 12
DIL Switch ............................................................................................................................... 12
USB ......................................................................................................................................... 12
RS-485 .................................................................................................................................... 12
Parameter..................................................................................................................13
Factor Menu............................................................................................................................. 13
Command Menu ...................................................................................................................... 13
General Menu.......................................................................................................................... 14
Input Menu............................................................................................................................... 15
Output Menu............................................................................................................................ 16
Modbus Menu.......................................................................................................................... 16
Serial Menu ............................................................................................................................. 17
Commissioning ........................................................................................................18
Setting the Encoder Mode ....................................................................................................... 18
Setting the Encoder Output...................................................................................................... 18
Setting the Factor Ratio ........................................................................................................... 18
Setting the Output Direction..................................................................................................... 18
Additional Optional Settings..................................................................................................... 19
6.5.1. Setting the Z Output Pulses............................................................................................................19
6.5.2. Setting the Serial RS-485 Interface ................................................................................................19
Input Functions ........................................................................................................20
Reset Static ............................................................................................................................. 20
Direction .................................................................................................................................. 20
Trim+/- ..................................................................................................................................... 21
Offset Edge.............................................................................................................................. 22
Reset Edge.............................................................................................................................. 22
Z Reference............................................................................................................................. 23
Inhibit....................................................................................................................................... 23
Jog........................................................................................................................................... 23
Prestop Mark ........................................................................................................................... 25
Edge Prestop........................................................................................................................... 26
Reference ................................................................................................................................ 26