Summary ....................................................................................................................4
Summary of Configuration Options..........................................................................4
The Time Base............................................................................................................5
Temperature Compensated Crystal Oscillator (TCXO)............................................5
Oven-Controlled Crystal Oscillator ..........................................................................6
Atomic Oscillator.........................................................................................................7
GNSS/GPS Disciplined Oscillator (GPSDO)...............................................................8
Dual-Time Base Frequency Verification (option).......................................................10
GNSS Receiver.........................................................................................................11
Sensitivity..............................................................................................................11
TTFF (Time to First Fix) ........................................................................................11
PPS ..........................................................................................................................14
PPS Availability.....................................................................................................14
Cable Delays.........................................................................................................15
Pulse Width...........................................................................................................15
Factory Default Settings........................................................................................15
Output Drive..............................................................................................................16
PPS Accuracy.......................................................................................................16
PPS Holdover .......................................................................................................16
NMEA - RS232 .........................................................................................................18
Base Unit Block Diagram..........................................................................................21
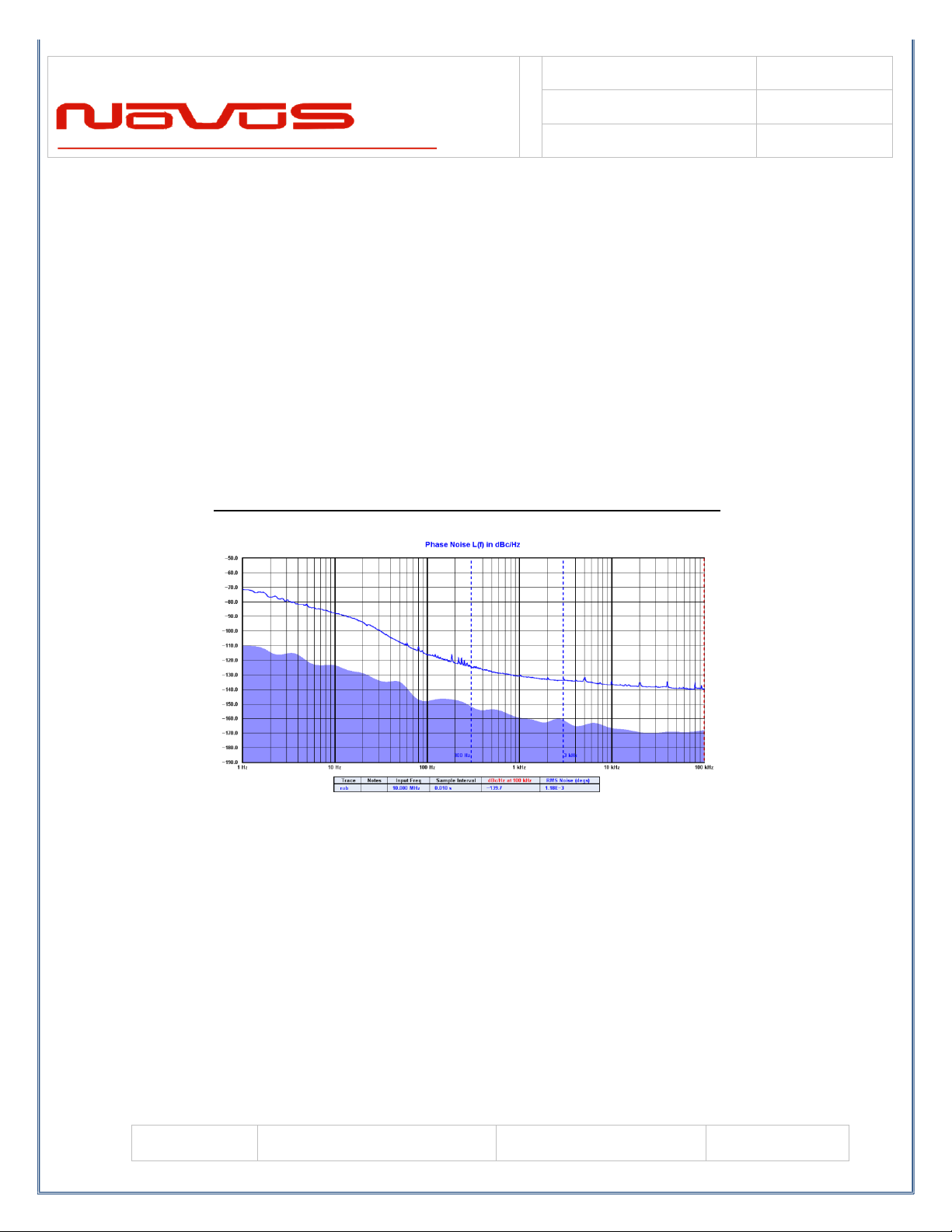
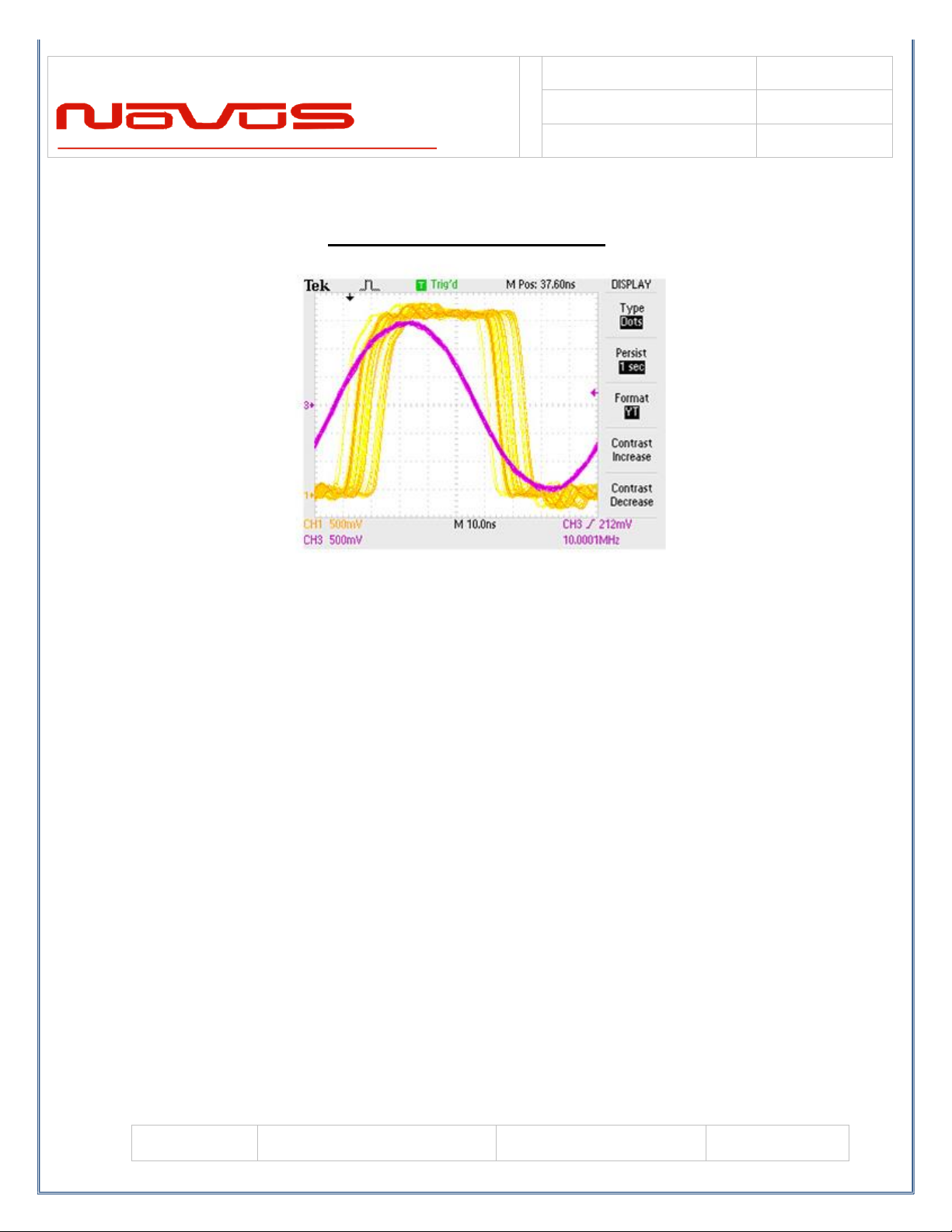
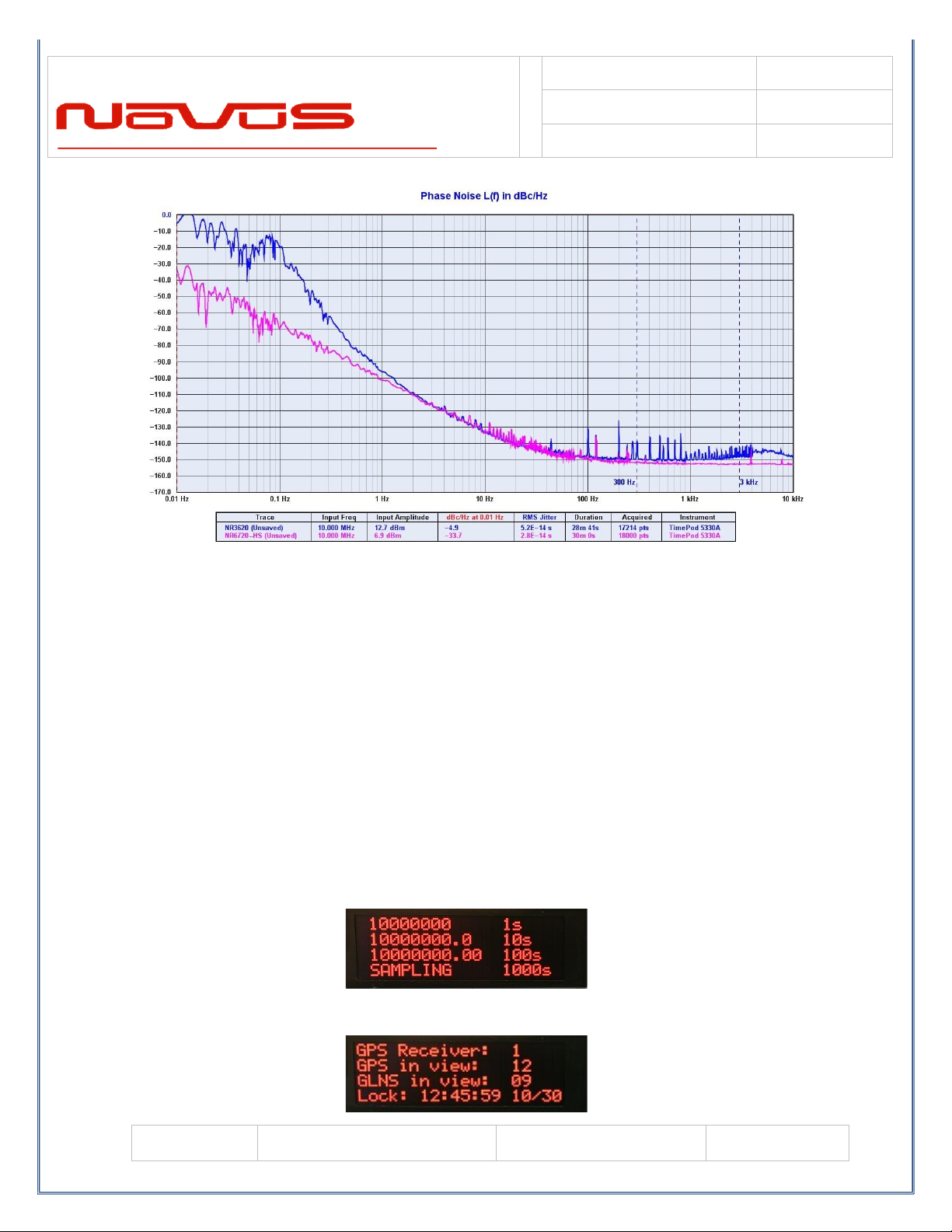
Phase Noise Performance........................................................................................23
Controls and indicators .............................................................................................23
Channel Status- Front panel LED’s .......................................................................23
Oven- LED front Panel..........................................................................................24
Digital Display (Optional).......................................................................................24
Time/Date/Lock Status..........................................................................................24
GNSS/GPS Status................................................................................................25
UTC Mode.............................................................................................................25
GMT offset............................................................................................................26
Channel Status .....................................................................................................26
Next and Select Buttons........................................................................................26
RS232 NMEA / Alert –DB9 Male (Optional).........................................................27
Rear Panel - Outputs ................................................................................................28
Channel 1 through 10 output connectors –BNC or SMA.......................................28
PPS –SMA (with GPS locking option) ..................................................................28
Alert –BNC-SMA..................................................................................................29
Power In................................................................................................................29
Antenna Connection (with GNSS option only).......................................................29
Functional Description (Base NR2310D-OG)............................................................31
Outputs.................................................................................................................31