I. Assembly Instructions
What’s In the Package
The PeasantCopter frame kit comes with everything you need to assemble
the frame of your quadcopter, including frame plates and necessary hardware.
Upon opening your package, you should find:
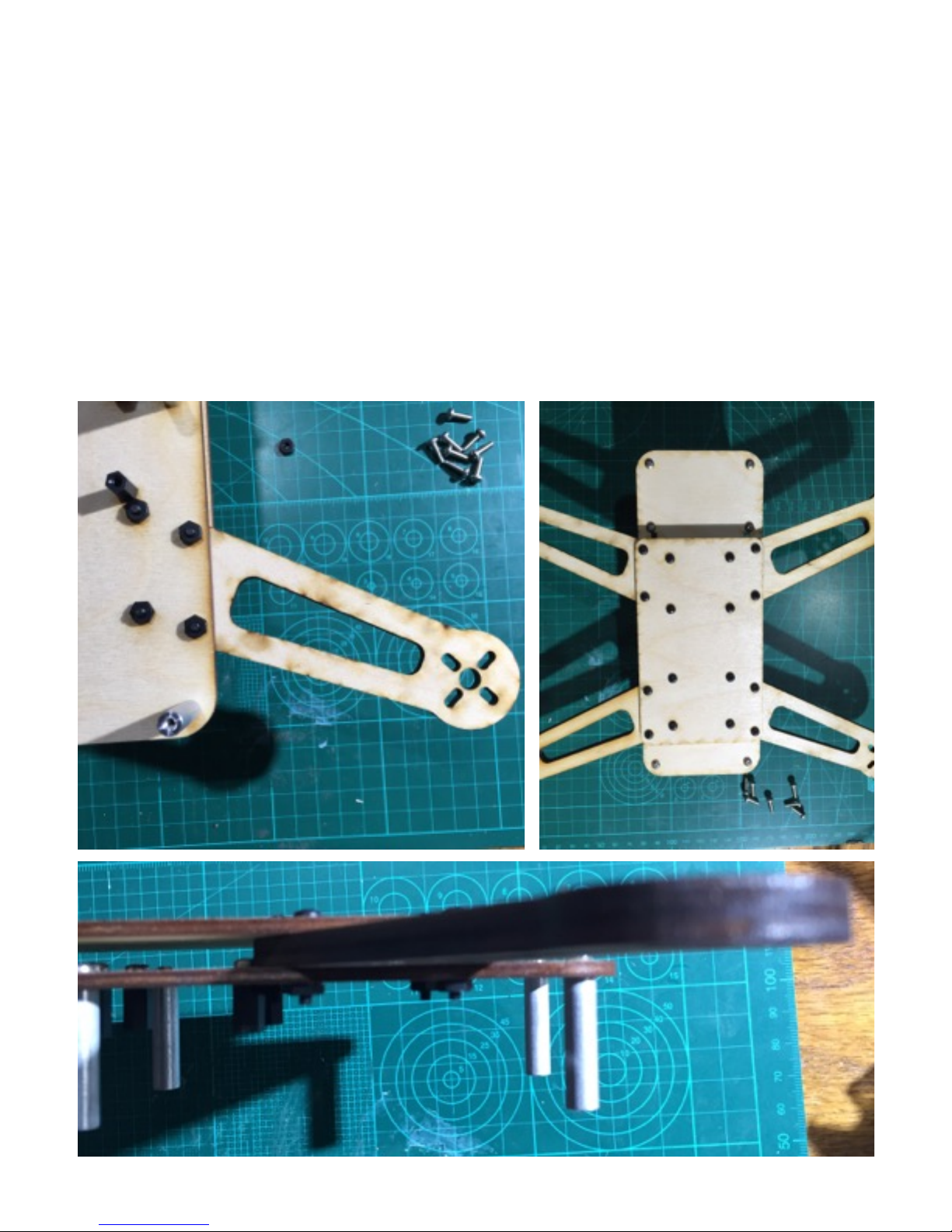
1 x 1/4" Plywood Arm Set (4 arms of either the 5” or 6” variety, depending on
what you ordered)
1 x 1/8" Plywood Body Plate Set (1 front top plate, 1 battery tray, 1 skid plate,
1 main body plate, 2 side plates)
20 x 5/8" 4-40 Black Nylon Pan Head Machine Screws (arm mounting)
20 x 3/32" 4-40 Black Nylon Nuts (arm mounting)
4 x 2" 4-40 Aluminum Standoffs (camera cage standoffs)
4 x 1" 4-40 Aluminum Standoffs (rear cage standoffs)
10 x 3/8" 4-40 Zinc Steel Pan Head Machine Screws (standoffmounting)
20 x 8mm M3 Zinc Steel Pan Head Machine Screw (motor mounting)
1 x Epic PeasantCopter Sticker
If you think that anything is missing from your package, please shoot us an
you have lost components that were originally included in your package, via the
dreaded oh-crap-it-bounced-off-my-workbench-and-I-can’t-find-it move or through
good ‘ol fashioned crashing and bashing of your frame, shoot us an email as well
and we’ll see what we can do. Many hardware parts are also available separately
on the PeasantCopter online store and your local hardware store (most
PeasantCopter structural hardware is of the standard 4-40 variety).


























 user manual")