SRV02 Gyroscope User Manual
Table of Contents
1. PRESENTATION..........................................................................................................................................1
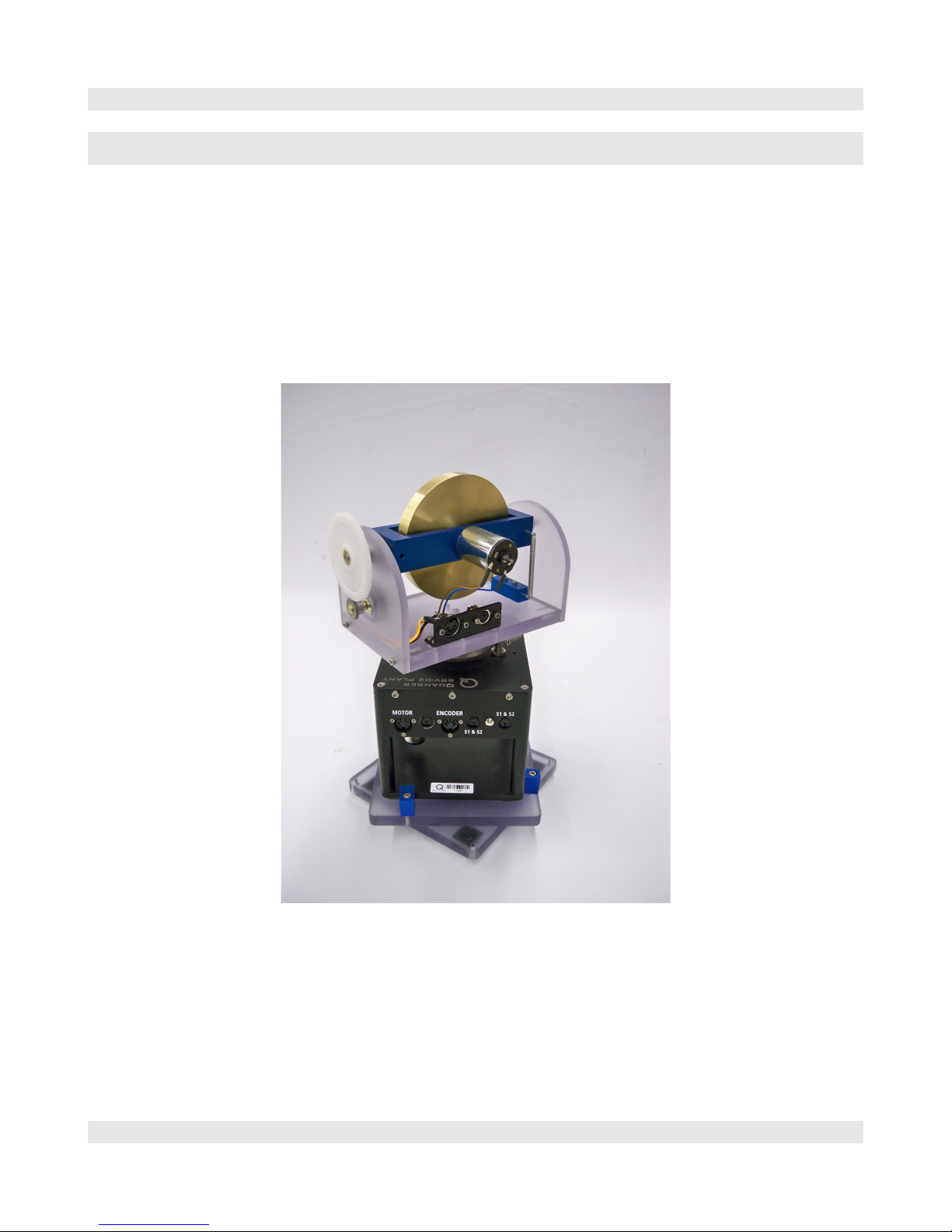
2. SRV02 AND GYROSCOPE PLANT COMPONENTS..........................................................................................2
2.1. Componen Nomencla ure................................................................................................................2
2.2. Componen Descrip ion....................................................................................................................3
2.2.1. Disk/Ro or..............................................................................................................................................3
2.2.2. DC mo or ...............................................................................................................................................3
2.2.3. Inner frame.............................................................................................................................................4
2.2.4. Encoder for inner frame ro a ion measuremen .....................................................................................4
2.2.5. Suppor springs......................................................................................................................................4
2.2.6. Gear mechanism....................................................................................................................................4
2.2.7. Gyroscope module encoder connec or ..................................................................................................4
2.2.8. SRV02 plan ...........................................................................................................................................4
2.2.9. Suppor base pla es.................................................................................................................................4
2.2.10. Hold clamps.........................................................................................................................................4
2.2.11. Gyroscope ro a ion disk mo or connec ors...........................................................................................5
3. SYSTEM PARAMETERS................................................................................................................................5
4. SYSTEM SETUP..........................................................................................................................................5
5. WIRING PROCEDURE.................................................................................................................................6
5.1. Cable Nomencla ure.........................................................................................................................6
5.2. Typical Connec ions.........................................................................................................................7
5.2.1. Connec ion De ails.................................................................................................................................8
6. TESTING AND TROUBLESHOOTING...............................................................................................................9
6.1. Mo or................................................................................................................................................9
6.1.1. Tes ing...................................................................................................................................................9
6.1.2. Troubleshoo ing.....................................................................................................................................9
Document Number 908 ♦ Revision 1.1 ♦ age ii